重要!重要!重要!
解决melodic过程中遇到的问题。
执行命令:
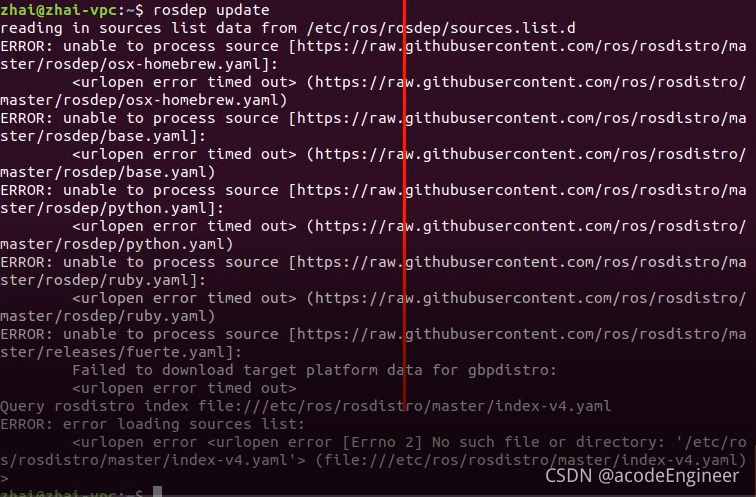
rosdep update
出现错误如下:(
注意:命令中不需要sudo
)

意思就是网速太慢了,下载不了20-default.list这个文件。
自己在路径下(/etc/ros/rosdep/sources.list.d)创建这个文件。
mkdir -r /etc/ros/rosdep/sources.list.d可以复制添加文件内容
# os-specific listings first
# yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
yaml file:/etc/ros/rosdep/sources.list.d/rosdistro-master/rosdep/osx-homebrew.yaml osx
# generic
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
在/etc/resolv.conf将原先的nameserver屏蔽,添加两个nameserver
打开etc/hosts文件添加
还有的教程是修改时间值,我改了没有用

解决掉20-default.list这个文件。
执行rosdep update更新不成功的问题。
太多方法都没解决。
解决方法:
1、下载rosdistro-master.zip
链接:https://pan.baidu.com/s/1WSZRVfL0cld0WIzhrYKkBw
提取码:zxcv
2、修改20-default.list文件内容如下
# os-specific listings first
# yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/osx-homebrew.yaml osx
yaml file:/etc/ros/rosdep/sources.list.d/rosdistro-master/rosdep/osx-homebrew.yaml osx
# generic
# yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/base.yaml
# yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/python.yaml
# yaml https://raw.githubusercontent.com/ros/rosdistro/master/rosdep/ruby.yaml
# gbpdistro https://raw.githubusercontent.com/ros/rosdistro/master/releases/fuerte.yaml fuerte
yaml file:/etc/ros/rosdep/sources.list.d/rosdistro-master/rosdep/base.yaml
yaml file:/etc/ros/rosdep/sources.list.d/rosdistro-master/rosdep/python.yaml
yaml file:/etc/ros/rosdep/sources.list.d/rosdistro-master/rosdep/ruby.yaml
gbpdistro file:/etc/ros/rosdep/sources.list.d/rosdistro-master/releases/fuerte.yaml fuerte
# newer distributions (Groovy, Hydro, ...) must not be listed anymore, they are being fetched from the rosdistro index.yaml instead
3、将下载好的rosdistro-master.zip解压后复制到路径(/etc/ros/rosdep/sources.list.d)下,
执行命令:
![]()
该路径中文件情况
【关键步骤】下面执行3个命令修改其中的网址信息

DEFAULT_SOURCES_LIST_URL行的信息
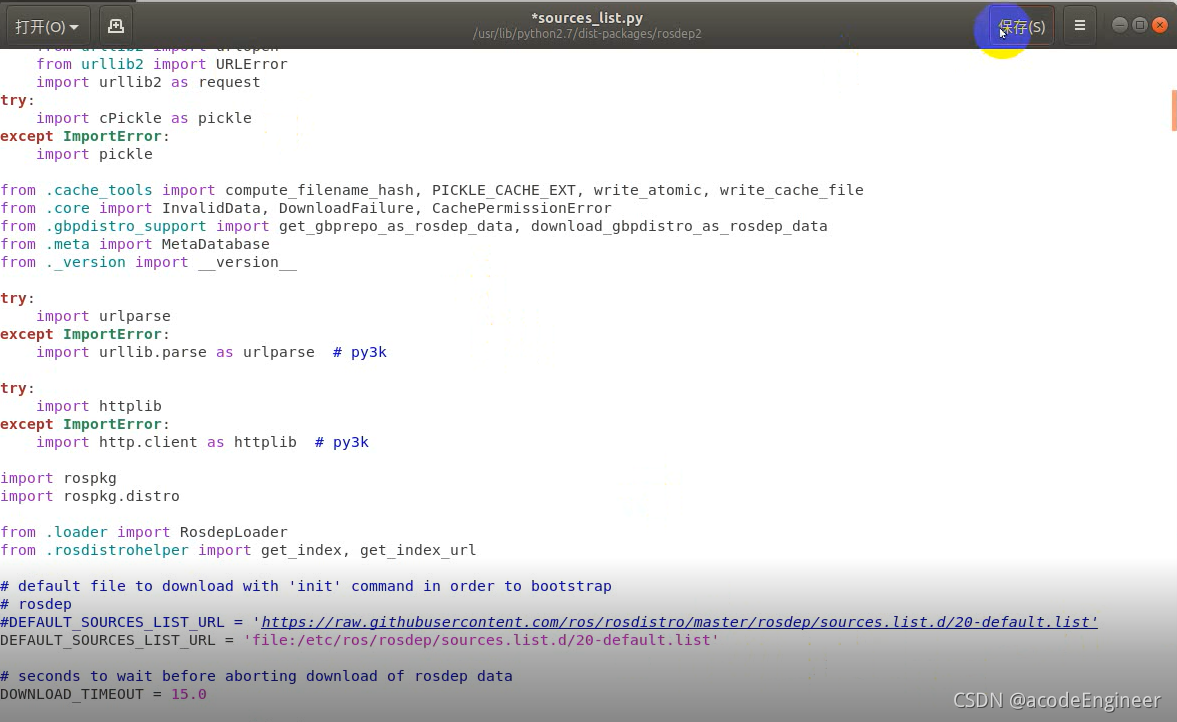
执行命令,
![]()
REP3_TARGETS_URL行
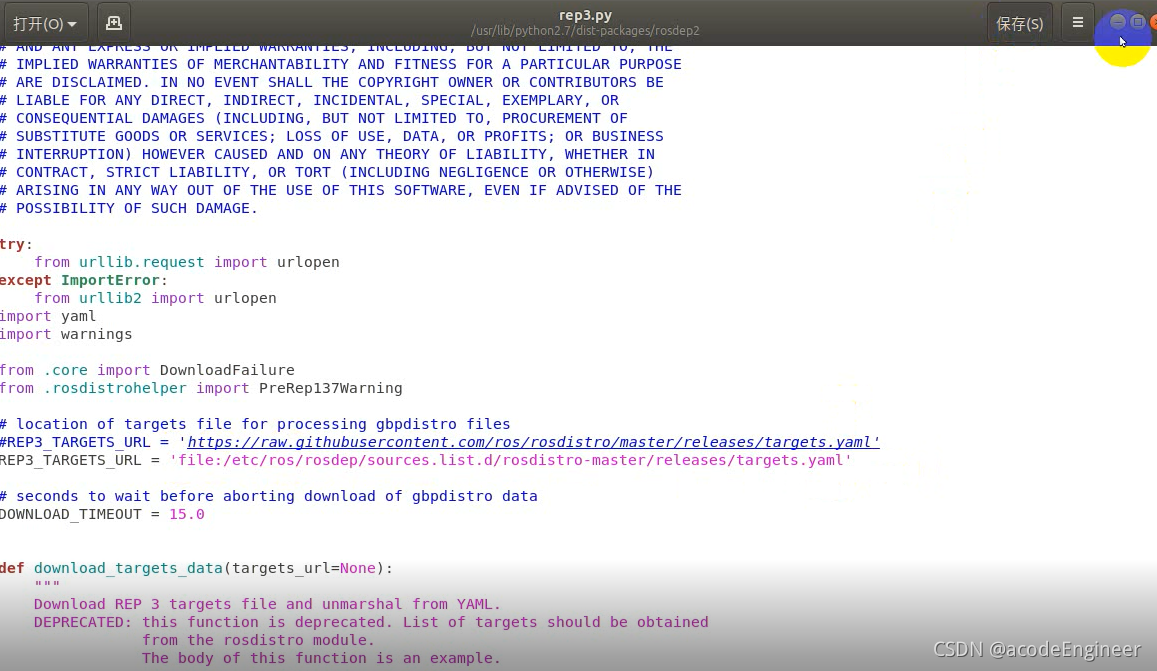
执行命令,
![]()
DEFAULT_INDEX_URL行
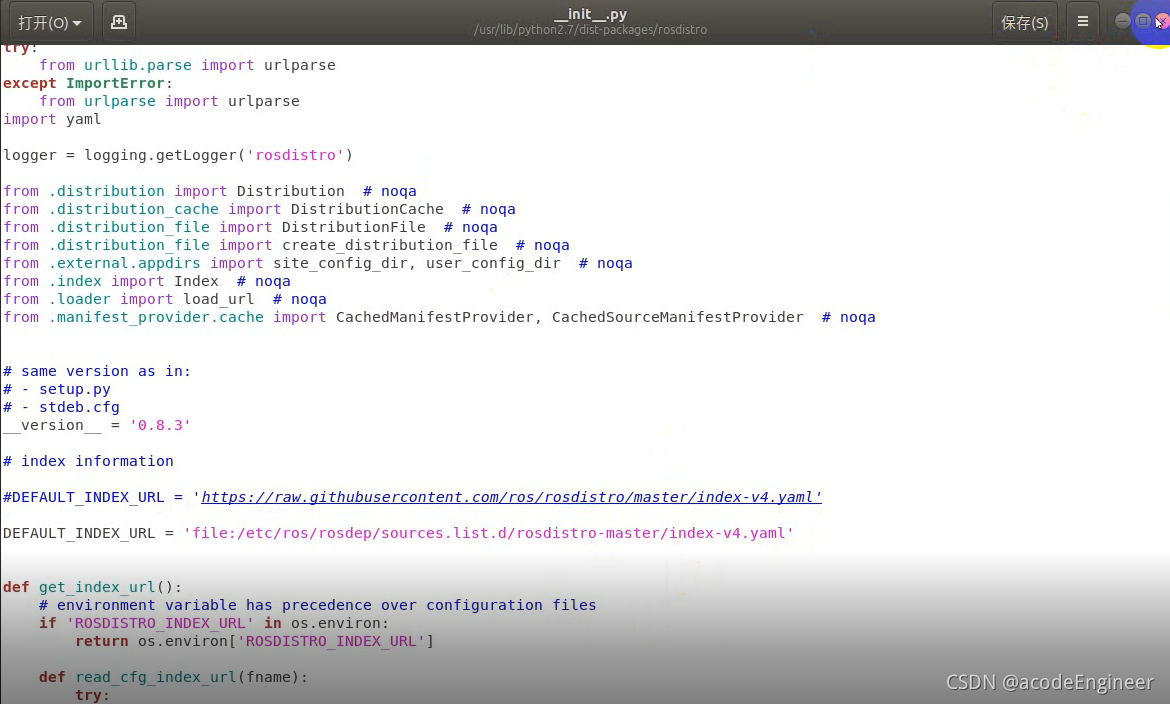
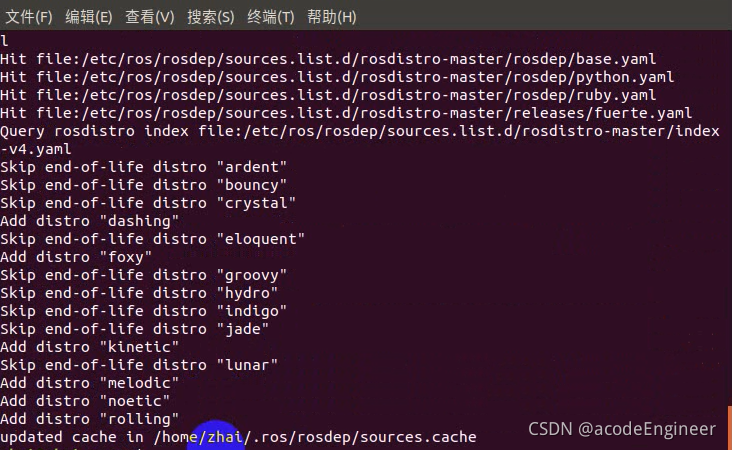
3条命令修改完成后,执行
rosdep update出现下述界面说明安装成功。
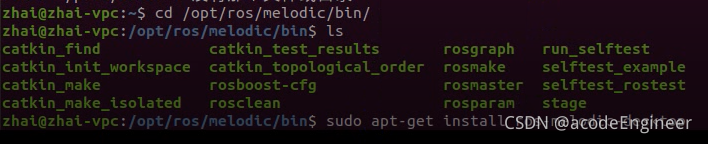
接下来测试安装环境:

我擦,这么情况,继续解决
继续执行命令:
sudo apt-get install ros-melodic-desktop
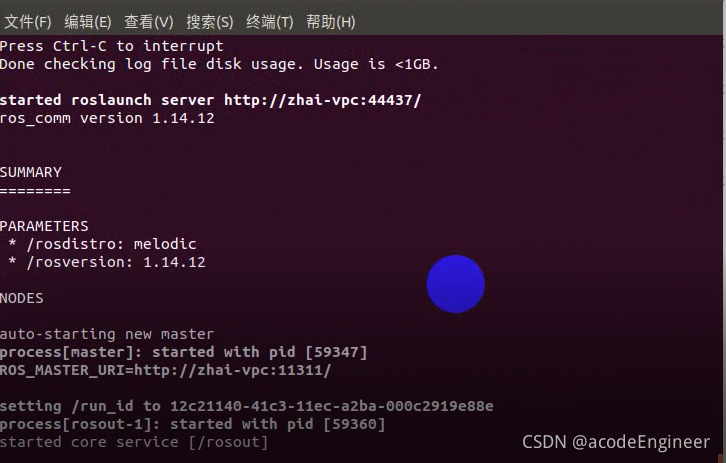
待安装完成后
再行执行roscore
打开3个终端,测试小乌龟
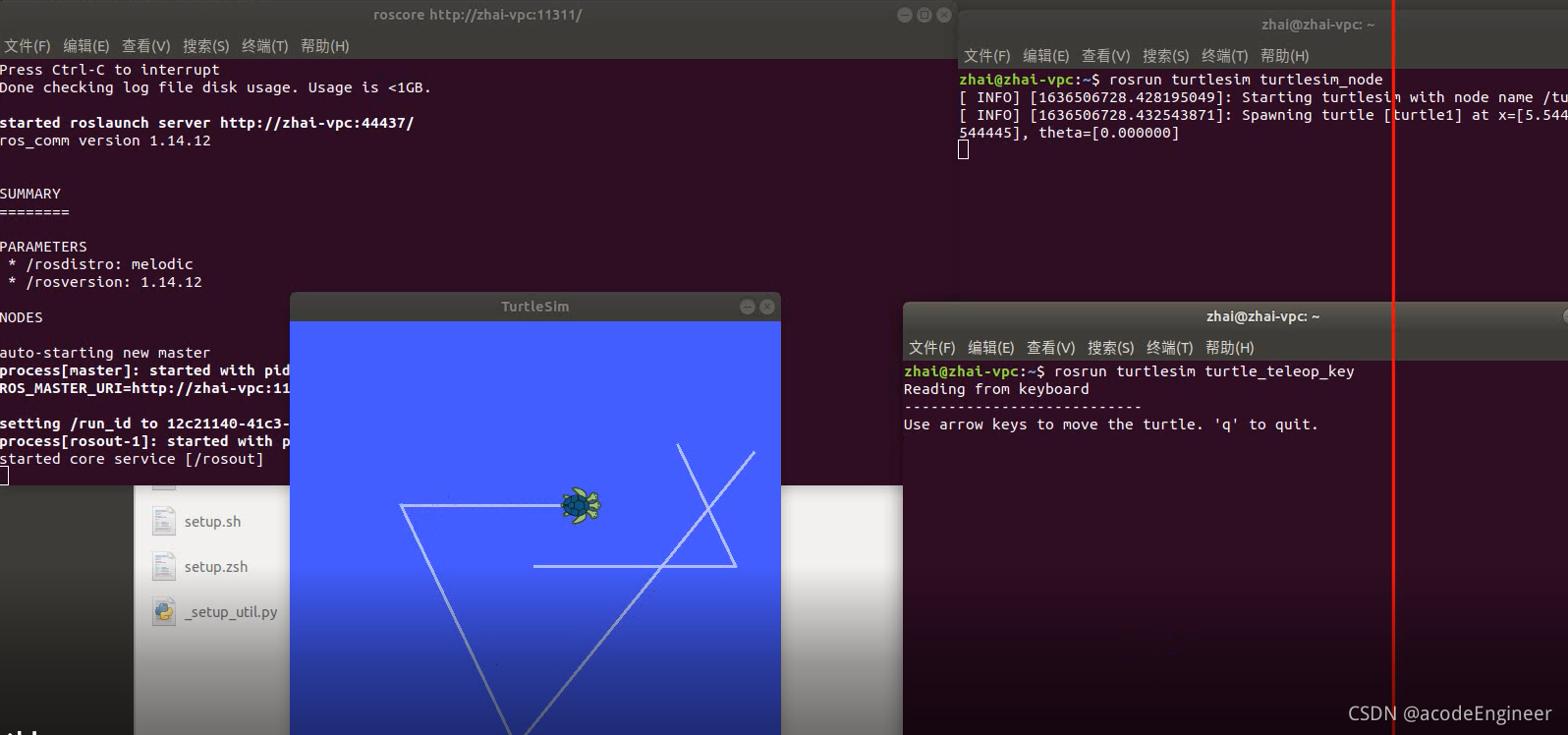
ROS环境搭建完成。