前言
参考代码:
github代码地址
1、创建虚拟环境
conda create -n stitching python=3.7.0
2、激活虚拟环境
conda activate stitching
3、安装opencv和相应的包
3.1 查看可安装opencv版本
相关opencv的最新版安装可见
opencv安装
pip install opencv-python==

进行安装
pip install opencv-python==3.4.2.16
进行测试

3.2 安装对应的包
pip install imutils
3.3 安装opencv-contrib-python
出现报错
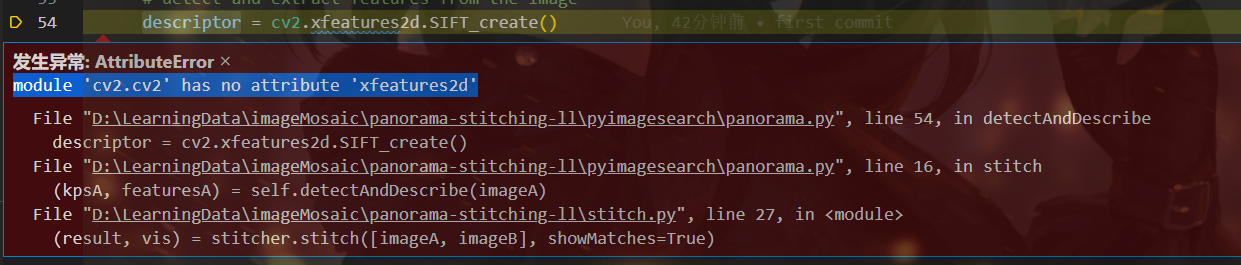
解决办法:补上一个版本配套的contrib包
pip install opencv-contrib-python==3.4.2.16
3.4 matplotlib安装
pip install matplotlib
3.5 PCV安装
可以参考
PCV安装
- 进入对应的文件夹clone PCV的代码
git clone https://github.com/Li-Shu14/PCV.git
-
进行安装
这里由于我是在windows环境安装的
首先改变盘符到你对应的盘如D:
进入文件夹cd xxx/PCV
python setup.py install
3.5 scipy安装
重新回到参考代码中,运行程序出现了报错
ModuleNotFoundError: No module named 'scipy'
在对应环境进行安装
pip install scipy
4、报错记录
4.1 print报错
SyntaxError: Missing parentheses in call to 'print'. Did you mean print('warp - right')?
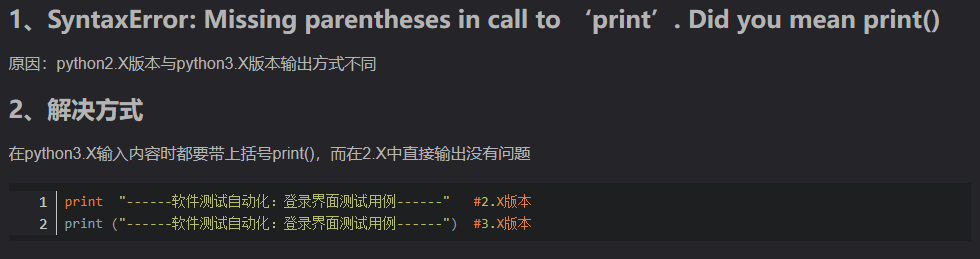
之前的PCV是应用于python2的,现在有针对python3更新的
基于python3的PCVgithub
参考
PCV安装基于python3
进行安装
4.2 matplotlib.delaunay报错
ModuleNotFoundError: No module named 'matplotlib.delaunay'
更改方式可以参考
matplotlib.delaunay报错
然后重新进行安装(这里不能直接进到对应的文件,所以修改完需要重新安装,我这里安装出现了报错,我直接删除了虚拟环境重新创建,然后进行安装)
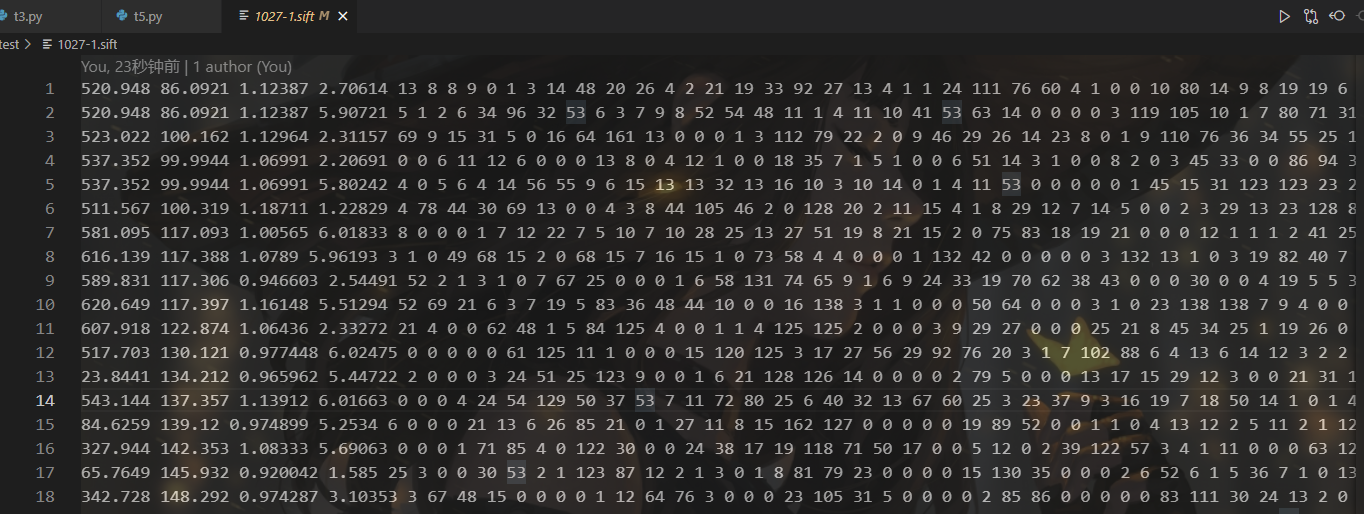
4.3 无法生成.sift文件

File "D:\anaconda\envs\stitching\lib\site-packages\numpy\lib\_datasource.py", line 533, in open
raise IOError("%s not found." % path)
OSError: ./test/1027-1.sift not found.
参考链接:
OSError:sift not found 问题解决
图像拼接参考链接
-
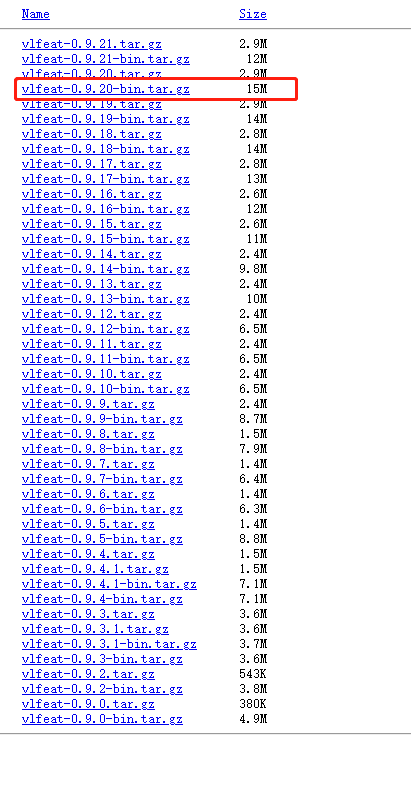
VLfeat下载
VLfeat下载
-
选择对应的文件移入当前工程文件夹

-
根据你自己的电脑是直接安装的Python还是Anaconda安装的找到对应目录中的【sift.py】文件
直接安装的路径
:
python\Lib\site-packages\PCV\localdescriptors
Anaconda安装的路径
:
Anaconda\Lib\site-packages\PCV\localdescriptors
-
打开sift.py,修改路径
打开【sift.py】文件,全局
cmmd
,将箭头指向的那个引号里的路径改为自己项目中【sift.exe】的路径
注意:路径中如果用“\”则需要在前端加“r”,用’‘/’’或“\”则不需要
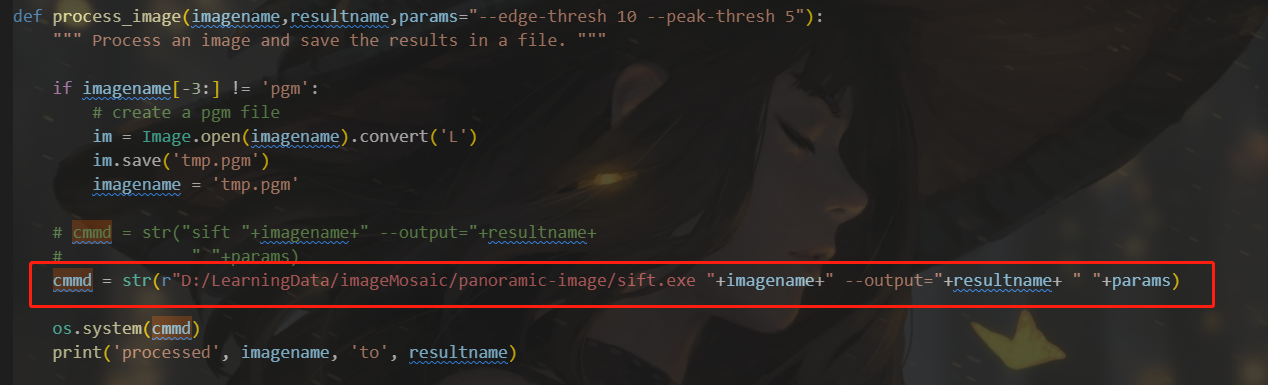
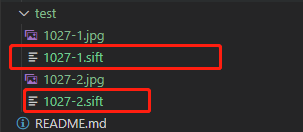
成功生成sift文件
cmmd = str(r"D:/LearningData/imageMosaic/panoramic-image/sift.exe "+imagename+" --output="+resultname+ " "+params)
4.4 图片差异太大
ValueError: did not meet fit acceptance criteria
多图拼接对图片的要求比较高,差异性大或太小(几乎相同)的拼接效果都很差。而且如果拍摄地点变动过大,会导致匹配值为0
5、拼接结果
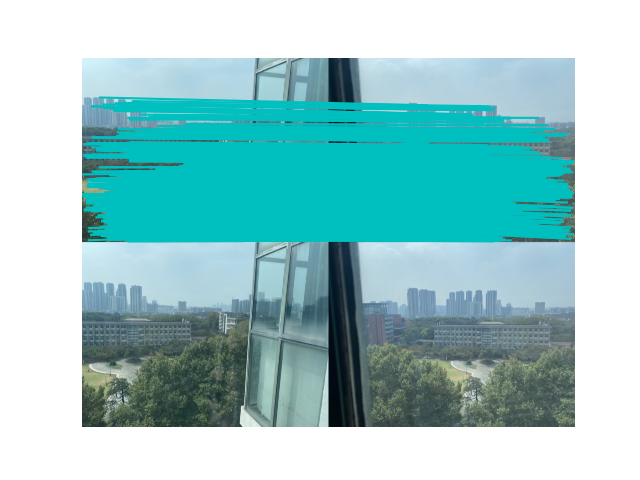
5.1 两张图拼接
-
原图


-
获取特征
-
拼接结果

5.2 两张不同角度图拼接
-
原图


-
特征
-
结果

景深有一定差异,但是对于不同角度的图像拼接还是可以进行拼接的
5.3 三张图拼接
-
原图




-
特征


-
拼接结果

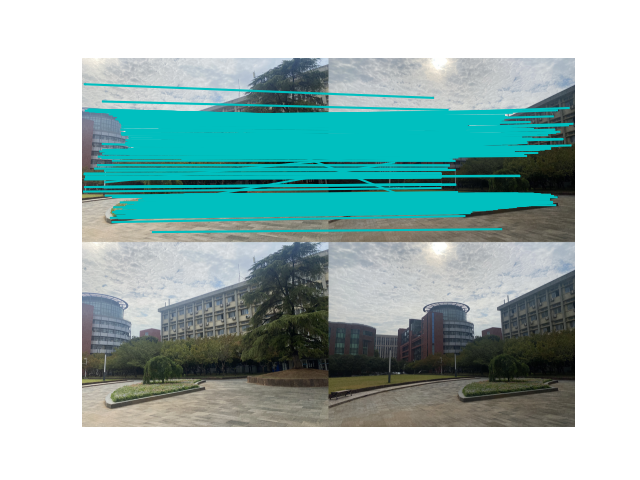
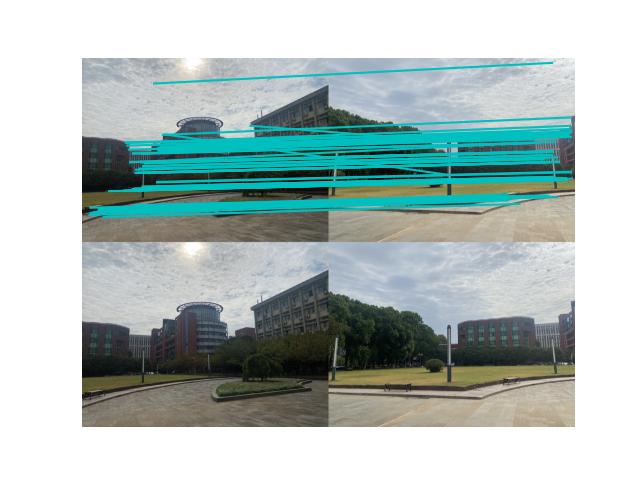
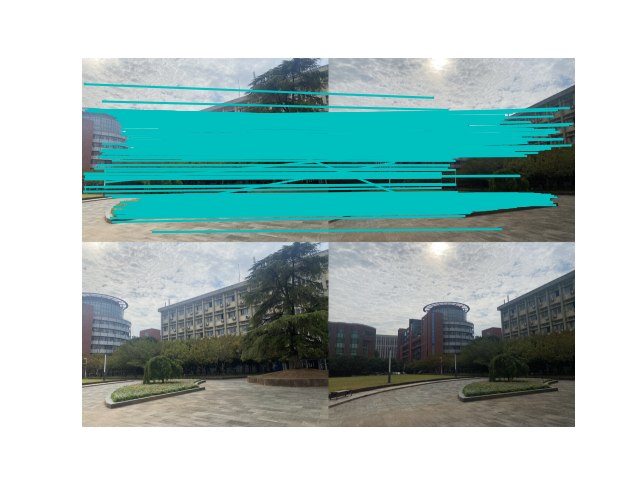
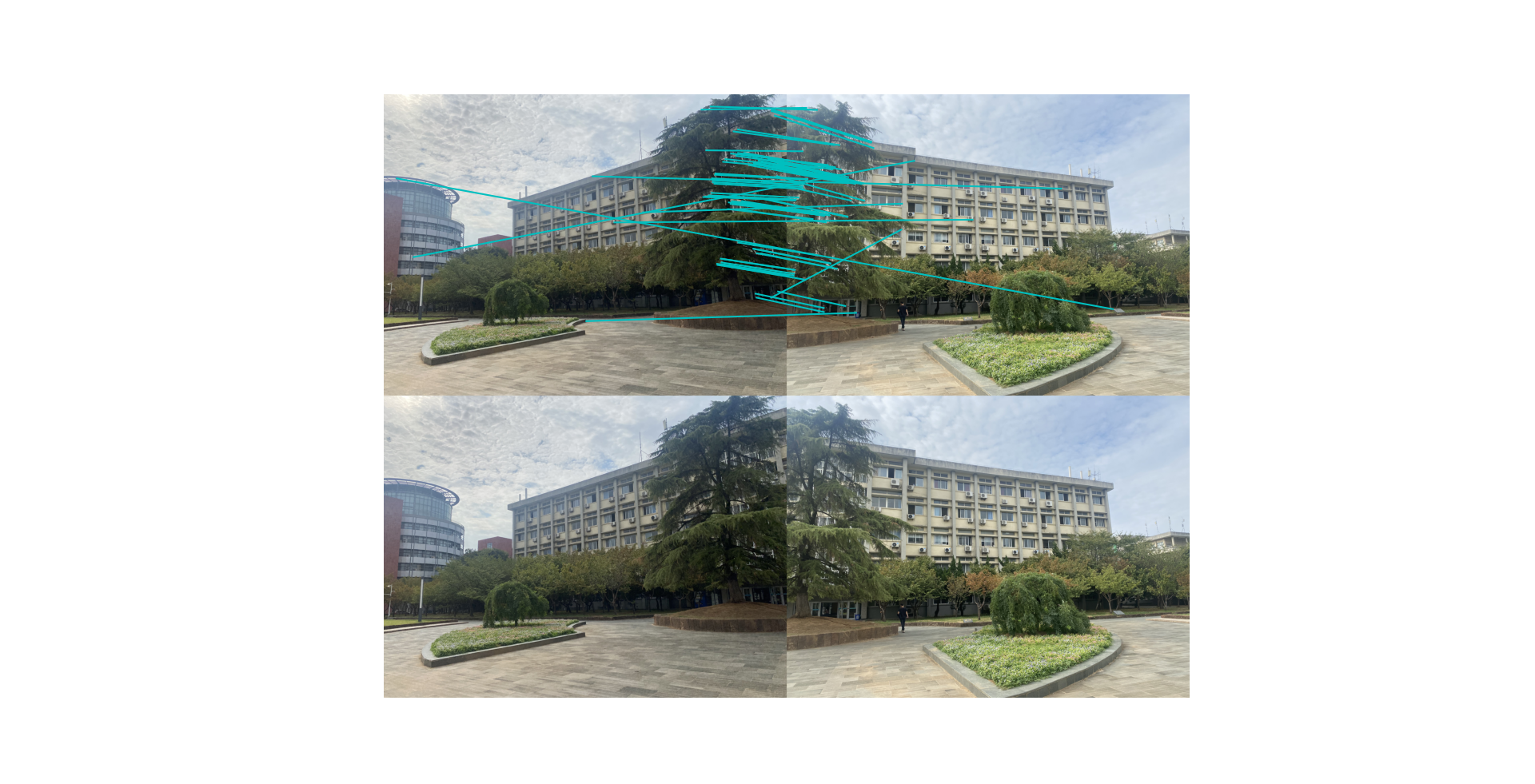
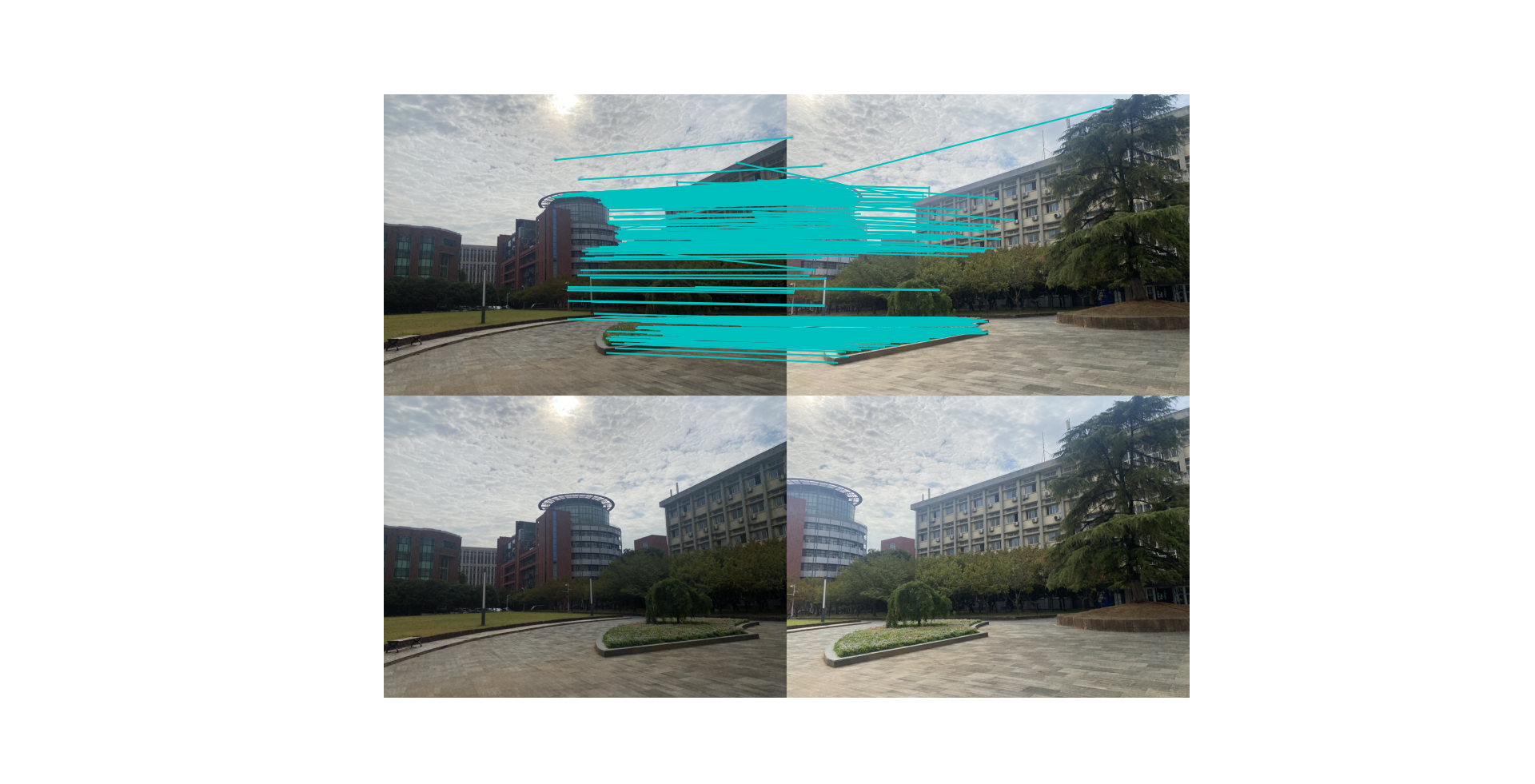
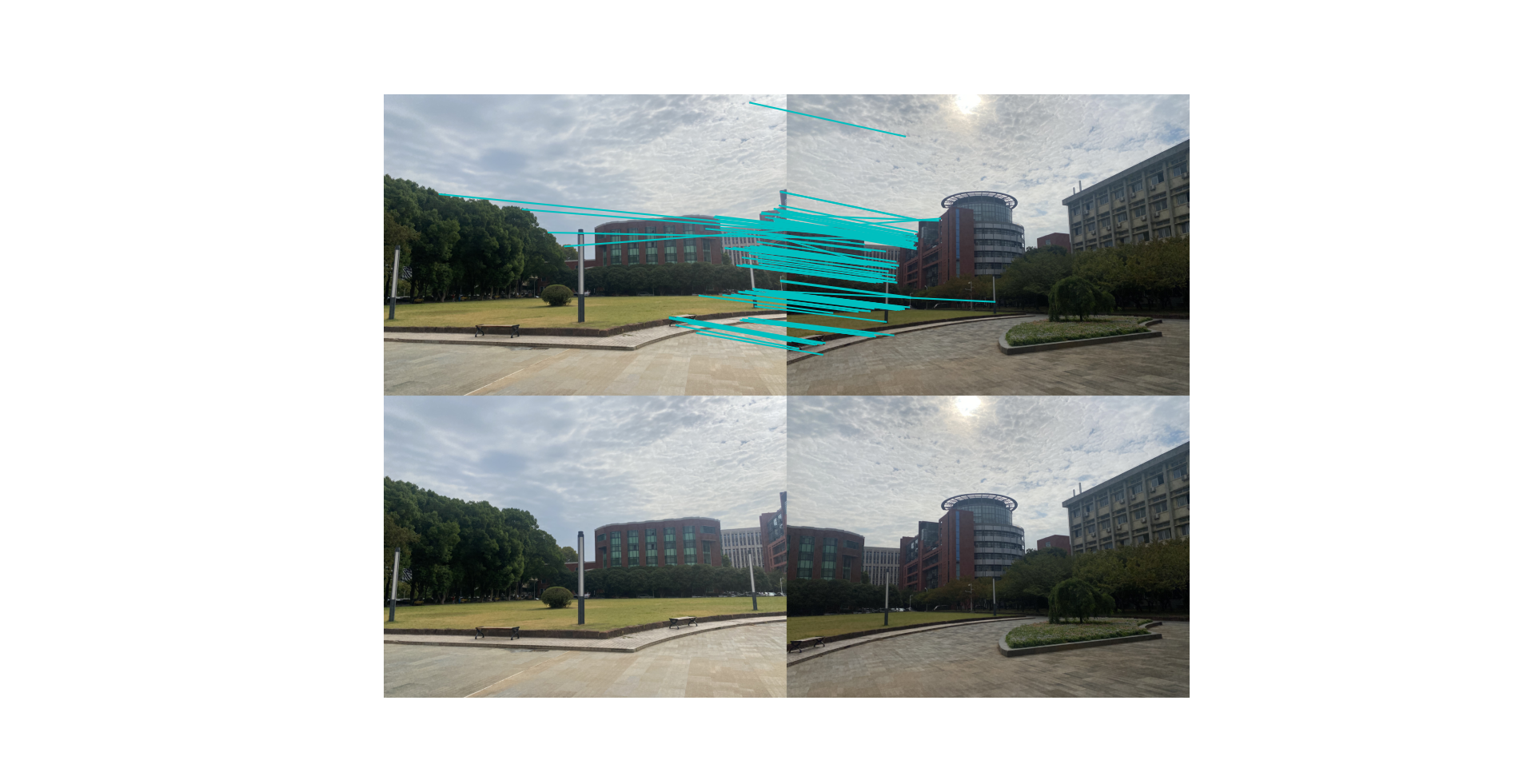
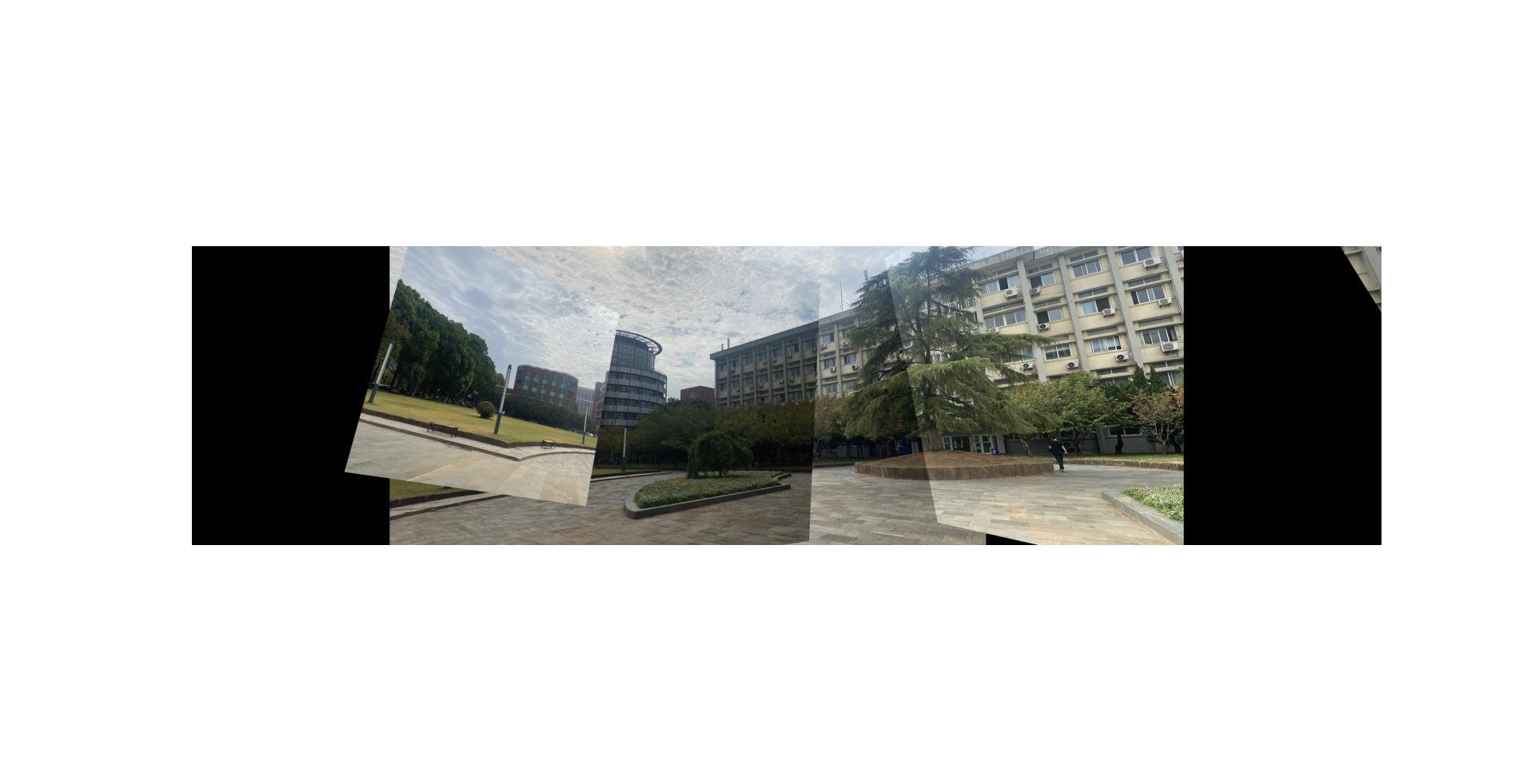
5.4 四图拼接
-
原图




-
特征图

-
结果

对于多张图的拼接还是有些变形
5.5 五张图片拼接
-
原图






顺序自右向左 -
特征

-
结果
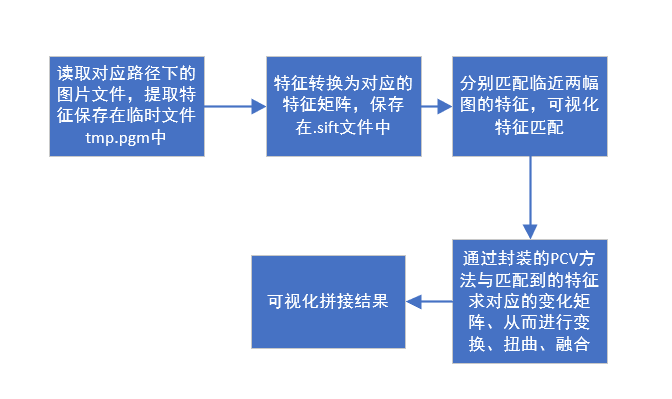
6、拼接过程梳理
-
读取对应路径下的图片文件,提取特征保存在临时文件tmp.pgm中

-
特征转换为对应的特征矩阵,保存在.sift文件中
-
分别匹配临近两幅图的特征,可视化特征匹配
-
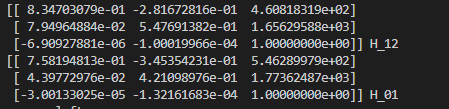
通过封装的PCV方法与匹配到的特征求对应的变化矩阵、从而进行变换、扭曲、融合
对应的变换矩阵如下
-
可视化拼接结果
附录
1、PCV更改地址
基于4、5两个问题都是python版本导致的问题,修改后的代码我上传到了github
自己改的PCV代码
2、两幅图像拼接代码
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
"""
This is the panorama example from section 3.3.
"""
# set paths to data folder
# imname使我们要拼接的原图
# featname是sift文件,这个文件是需要根据原图进行生成的
# 需要根据自己的图像地址和图像数量修改地址和循环次数
# featname = ['./images5/'+str(i+1)+'.sift' for i in range(2)]
# imname = ['./images5/'+str(i+1)+'.jpg' for i in range(2)]
featname = ['./test/1027-'+str(i+1)+'.sift' for i in range(2)]
imname = ['./test/1027-'+str(i+1)+'.jpg' for i in range(2)]
# extract features and match
l = {}
d = {}
for i in range(2):
sift.process_image(imname[i],featname[i])
l[i],d[i] = sift.read_features_from_file(featname[i])
matches = {}
for i in range(1):
matches[i] = sift.match(d[i+1],d[i])
# visualize the matches (Figure 3-11 in the book)
for i in range(1):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i+1]))
figure()
sift.plot_matches(im2,im1,l[i+1],l[i],matches[i],show_below=True)
# function to convert the matches to hom. points
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j+1][ndx,:2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2,:2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1],fp[0],fp[2]])
tp = vstack([tp[1],tp[0],tp[2]])
return fp,tp
# estimate the homographies
model = homography.RansacModel()
# 此代码段为2图图像拼接,若需要多幅图,只需将其中的注释部分取消即可,图像顺序为自右向左。
fp,tp = convert_points(0)
H_01 = homography.H_from_ransac(fp,tp,model)[0] #im 0 to 1
#fp,tp = convert_points(1)
#H_12 = homography.H_from_ransac(fp,tp,model)[0] #im 1 to 2
#tp,fp = convert_points(2) #NB: reverse order
#H_32 = homography.H_from_ransac(fp,tp,model)[0] #im 3 to 2
#tp,fp = convert_points(3) #NB: reverse order
#H_43 = homography.H_from_ransac(fp,tp,model)[0] #im 4 to 3
# warp the images
delta = 2000 # for padding and translation
im1 = array(Image.open(imname[0]), "uint8")
im2 = array(Image.open(imname[1]), "uint8")
im_12 = warp.panorama(H_01,im1,im2,delta,delta)
#im1 = array(Image.open(imname[0]), "f")
#im_02 = warp.panorama(dot(H_12,H_01),im1,im_12,delta,delta)
#im1 = array(Image.open(imname[3]), "f")
#im_32 = warp.panorama(H_32,im1,im_02,delta,delta)
#im1 = array(Image.open(imname[4]), "f")
#im_42 = warp.panorama(dot(H_32,H_43),im1,im_32,delta,2*delta)
figure()
imshow(array(im_12, "uint8"))
axis('off')
savefig("example1.png",dpi=300)
show()
3、三幅图像拼接代码
# 博客方法(三张图)
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore') # 忽略部分警告
"""
This is the panorama example from section 3.3.
"""
# 设置数据文件夹的路径
featname = ['test/1027-'+str(i+1)+'.sift' for i in range(3)]
imname = ['test/1027-'+str(i+1)+'.jpg' for i in range(3)]
# 提取特征并匹配使用sift算法
l = {}
d = {}
for i in range(3):
sift.process_image(imname[i], featname[i]) # 处理图像并将结果保存到文件中tmp.pgm,进而保存到.sift文件中
# feature locations, descriptors要素位置,描述符
l[i], d[i] = sift.read_features_from_file(featname[i]) # 读取特征属性并以矩阵形式返回
# 特征间两两匹配
matches = {}
for i in range(2):
matches[i] = sift.match(d[i + 1], d[i])
# 可视化匹配
for i in range(2):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
# im1、im2(图像作为数组)、locs1、locs2(特征位置),matchscores(作为“match”的输出),show_below(如果下面应该显示图像)
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# 将匹配转换成齐次坐标点的函数
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# 估计单应性矩阵
model = homography.RansacModel()
# 博客方法
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2
print(H_12, 'H_12')
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1
print(H_01, 'H_01')
# tp, fp = convert_points(2) # NB: reverse order
# H_32 = homography.H_from_ransac(fp, tp, model)[0] # im 3 to 2
# tp, fp = convert_points(3) # NB: reverse order
# H_43 = homography.H_from_ransac(fp, tp, model)[0] # im 4 to 3
# 扭曲图像
delta = 1500 # for padding and translation用于填充和平移
# 博客方法
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
# im1 = array(Image.open(imname[3]), "f")
# im_32 = warp.panorama(H_32, im1, im_02, delta, delta)
# im1 = array(Image.open(imname[4]), "f")
# im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta)
figure()
imshow(array(im_02, "uint8"))
axis('off')
show()
4、四幅图像拼接代码
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore') # 忽略部分警告
"""
This is the panorama example from section 3.3.
"""
# 设置数据文件夹的路径
featname = ['test/1027-'+str(i+1)+'.sift' for i in range(4)]
imname = ['test/1027-'+str(i+1)+'.jpg' for i in range(4)]
# 提取特征并匹配使用sift算法
l = {}
d = {}
for i in range(4):
sift.process_image(imname[i], featname[i]) # 处理图像并将结果保存到文件中tmp.pgm,进而保存到.sift文件中
# feature locations, descriptors要素位置,描述符
l[i], d[i] = sift.read_features_from_file(featname[i]) # 读取特征属性并以矩阵形式返回
matches = {}
for i in range(3):
matches[i] = sift.match(d[i + 1], d[i])
# 可视化匹配
for i in range(3):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
# im1、im2(图像作为数组)、locs1、locs2(特征位置),matchscores(作为“match”的输出),show_below(如果下面应该显示图像)
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# 将匹配转换成齐次坐标点的函数
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# 估计单应性矩阵
model = homography.RansacModel()
# 博客方法
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1
tp, fp = convert_points(2) # NB: reverse order
H_32 = homography.H_from_ransac(fp, tp, model)[0] # im 3 to 2
# tp, fp = convert_points(3) # NB: reverse order
# H_43 = homography.H_from_ransac(fp, tp, model)[0] # im 4 to 3
# 扭曲图像
delta = 2000 # for padding and translation用于填充和平移
# 博客方法
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
im1 = array(Image.open(imname[3]), "f")
im_32 = warp.panorama(H_32, im1, im_02, delta, delta)
# im1 = array(Image.open(imname[4]), "f")
# im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta)
figure()
imshow(array(im_32, "uint8"))
axis('off')
show()
5、五张图像拼接代码
# -*- codeing =utf-8 -*-
# @Time : 2021/4/20 11:00
# @Author : ArLin
# @File : demo1.py
# @Software: PyCharm
from pylab import *
from numpy import *
from PIL import Image
# If you have PCV installed, these imports should work
from PCV.geometry import homography, warp
from PCV.localdescriptors import sift
np.seterr(invalid='ignore')
"""
This is the panorama example from section 3.3.
"""
# 设置数据文件夹的路径
featname = ['./test/1027-'+str(i+1)+'.sift' for i in range(5)]
imname = ['./test/1027-'+str(i+1)+'.jpg' for i in range(5)]
# 提取特征并匹配使用sift算法
l = {}
d = {}
for i in range(5):
sift.process_image(imname[i], featname[i])
l[i], d[i] = sift.read_features_from_file(featname[i])
matches = {}
for i in range(4):
matches[i] = sift.match(d[i + 1], d[i])
# 可视化匹配
for i in range(4):
im1 = array(Image.open(imname[i]))
im2 = array(Image.open(imname[i + 1]))
figure()
sift.plot_matches(im2, im1, l[i + 1], l[i], matches[i], show_below=True)
# 将匹配转换成齐次坐标点的函数
def convert_points(j):
ndx = matches[j].nonzero()[0]
fp = homography.make_homog(l[j + 1][ndx, :2].T)
ndx2 = [int(matches[j][i]) for i in ndx]
tp = homography.make_homog(l[j][ndx2, :2].T)
# switch x and y - TODO this should move elsewhere
fp = vstack([fp[1], fp[0], fp[2]])
tp = vstack([tp[1], tp[0], tp[2]])
return fp, tp
# 估计单应性矩阵
model = homography.RansacModel()
fp, tp = convert_points(1)
H_12 = homography.H_from_ransac(fp, tp, model)[0] # im 1 to 2
fp, tp = convert_points(0)
H_01 = homography.H_from_ransac(fp, tp, model)[0] # im 0 to 1
tp, fp = convert_points(2) # NB: reverse order
H_32 = homography.H_from_ransac(fp, tp, model)[0] # im 3 to 2
tp, fp = convert_points(3) # NB: reverse order
H_43 = homography.H_from_ransac(fp, tp, model)[0] # im 4 to 3
# 扭曲图像
delta = 2000 # for padding and translation用于填充和平移
im1 = array(Image.open(imname[1]), "uint8")
im2 = array(Image.open(imname[2]), "uint8")
im_12 = warp.panorama(H_12, im1, im2, delta, delta)
im1 = array(Image.open(imname[0]), "f")
im_02 = warp.panorama(dot(H_12, H_01), im1, im_12, delta, delta)
im1 = array(Image.open(imname[3]), "f")
im_32 = warp.panorama(H_32, im1, im_02, delta, delta)
im1 = array(Image.open(imname[4]), "f")
im_42 = warp.panorama(dot(H_32, H_43), im1, im_32, delta, 2 * delta)
figure()
imshow(array(im_42, "uint8"))
axis('off')
show()