参考链接(根据博主的步骤一次成功):
Hector_slam(数据集)
说明第一点:这个是可以成功的,但是这个数据集跑出来好乱呀,也看不出什么东西,可能是数据采集的质量不太好吧。然后我想用别的数据集来跑跑试试,于是我找到了这个比较常用的数据集,链接如下:
公开数据集
说明第二点:这个数据集下载下来不是bag文件,好像是.clf文件或者.html文件,所以需要先转化成bag文件呀。转化文件代码:
#!/usr/bin/env python
#coding=utf8
'''This is a converter for the Intel Research Lab SLAM dataset
( http://kaspar.informatik.uni-freiburg.de/~slamEvaluation/datasets/intel.clf )
to rosbag'''
import rospy
import rosbag
from sensor_msgs.msg import LaserScan
from nav_msgs.msg import Odometry
from math import pi
from tf2_msgs.msg import TFMessage
from geometry_msgs.msg import TransformStamped
import tf
import sys
def make_tf_msg(x, y, theta, t,base,base0):
trans = TransformStamped()
trans.header.stamp = t
trans.header.frame_id = base
trans.child_frame_id = base0
trans.transform.translation.x = x
trans.transform.translation.y = y
q = tf.transformations.quaternion_from_euler(0, 0, theta)
trans.transform.rotation.x = q[0]
trans.transform.rotation.y = q[1]
trans.transform.rotation.z = q[2]
trans.transform.rotation.w = q[3]
msg = TFMessage()
msg.transforms.append(trans)
return msg
if __name__ == "__main__":
if len(sys.argv) < 3:
print("请输入dataset文件名。")
exit()
print("正在处理" + sys.argv[1] + "...")
with open(sys.argv[1]) as dataset:
with rosbag.Bag(sys.argv[2], 'w') as bag:
i = 1
for line in dataset.readlines():
line = line.strip()
tokens = line.split(' ')
if len(tokens) <= 2:
continue
if tokens[0] == 'FLASER':
msg = LaserScan()
num_scans = int(tokens[1])
if num_scans != 180 or len(tokens) < num_scans + 9:
rospy.logwarn("unsupported scan format")
continue
msg.header.frame_id = 'base_laser_link'
t = rospy.Time(float(tokens[(num_scans + 8)]))
msg.header.stamp = t
msg.header.seq = i
i += 1
msg.angle_min = -90.0 / 180.0 * pi
msg.angle_max = 90.0 / 180.0 * pi
msg.angle_increment = pi / num_scans
msg.time_increment = 0.2 / 360.0
msg.scan_time = 0.2
msg.range_min = 0.001
msg.range_max = 50.0
msg.ranges = [float(r) for r in tokens[2:(num_scans + 2)]]
bag.write('scan', msg, t)
odom_x, odom_y, odom_theta = [float(r) for r in tokens[(num_scans + 2):(num_scans + 5)]]
tf_msg = make_tf_msg(odom_x, odom_y, odom_theta, t,'odom','base_link')
bag.write('tf', tf_msg, t)
elif tokens[0] == 'ODOM':
odom_x, odom_y, odom_theta = [float(t) for t in tokens[1:4]]
t = rospy.Time(float(tokens[7]))
tf_msg = make_tf_msg(0, 0, 0, t,'base_link','base_laser_link')
bag.write('tf', tf_msg, t)
转换方法参考如下链接(注意用上述代码):
注意:仅参考数据集转化部分操作步骤哈
此时,我们可以把转化好的数据集放到src同级的目录下等待测试。
然后,我们如果还是按照第一个参考链接来运行的话,发现会缺少tf转化,所以我们需要改写一下其中的两个launch文件,不组要动源码哈。
首先,在
如上的路径下,重新新建一个文件:hector_mapping_demo.launch,内容参考如下链接:
hector_mapping_demo.launch
这里为了大家方便,我直接把代码贴出来(跟原文中的不太一样,我把路径改了一下,这样的话,如果按照我的步骤做到这里,直接用这个应该没问题的):
<launch>
<!-- this launch used to run hector mapping by rosbag-->
<param name="use_sim_time" value="true"/>
<node pkg="tf" type="static_transform_publisher" name="map_to_odom" args="0.0 0.0 0.0 0 0 0.0 /odom /base_footprint 100" />
<node pkg="tf" type="static_transform_publisher" name="base_frame_laser" args="0 0 0 0 0 0 /base_footprint /scan 100" />
<!-- hector mapping -->
<include file="$(find hector_mapping)/launch/includes/hector_mapping.launch.xml"/>
</launch>
然后,需要再新建一个文件,在如下的路径中:
如上所示,新建hector_mapping.launch.xml文件。内容如下:
<launch>
<node pkg="hector_mapping" type="hector_mapping" name="hector_mapping" output="screen">
<!-- Frame names -->
<param name="pub_map_odom_transform" value="true"/>
<param name="map_frame" value="map" />
<param name="scan_topic" value="scan" />
<param name="base_frame" value="base_footprint"/>
<param name="odom_frame" value="odom"/>
<!-- Tf use -->
<param name="use_tf_scan_transformation" value="true"/>
<param name="use_tf_pose_start_estimate" value="false"/>
<!-- Map size / start point -->
<param name="map_resolution" value="0.05"/>
<param name="map_size" value="2048"/>
<param name="map_start_x" value="0.5"/>
<param name="map_start_y" value="0.5" />
<param name="laser_z_min_value" value = "-1.0" />
<param name="laser_z_max_value" value = "1.0" />
<param name="map_multi_res_levels" value="2" />
<!--
this is not include in mapping_default.launch
<param name="map_pub_period" value="2" />
<param name="laser_min_dist" value="0.4" />
<param name="laser_max_dist" value="5.5" />
<param name="output_timing" value="false" />
<param name="pub_map_scanmatch_transform" value="true" />
<param name="tf_map_scanmatch_transform_frame_name" value="scanmatcher_frame" />
-->
<!-- Map update parameters -->
<param name="update_factor_free" value="0.4"/>
<param name="update_factor_occupied" value="0.9" />
<param name="map_update_distance_thresh" value="0.4"/>
<param name="map_update_angle_thresh" value="0.06" />
<!-- Advertising config -->
<param name="advertise_map_service" value="true"/>
<param name="scan_subscriber_queue_size" value="5"/>
</node>
</launch>
然后,源码文件就改好啦。接下来我们用命令来启动试试把:



这样,应该没啥问题了,注意数据集的名字可替换哈。
最后,我运行的结果是这样的:
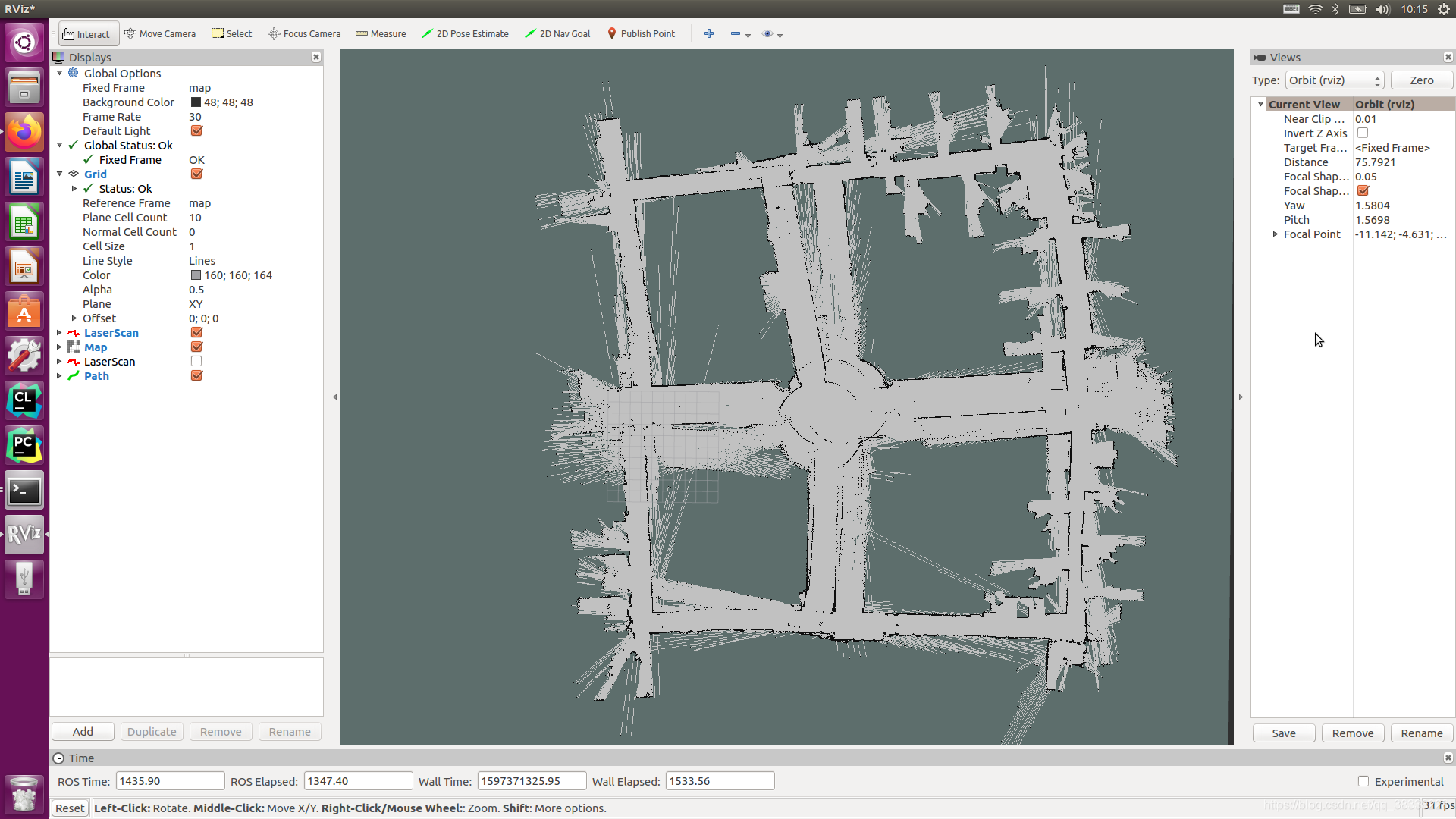
跑成这样是算法本身的原因了。好啦,本篇到此结束。希望能帮到你。