目的:
取一条腿为研究对象,对单腿的原地踏步进行模拟与仿真,给出运动轨迹,并得到相应的关节角的运动参数
后续想法->编写函数,输入轨迹,输出运动参数:
过程与实现:
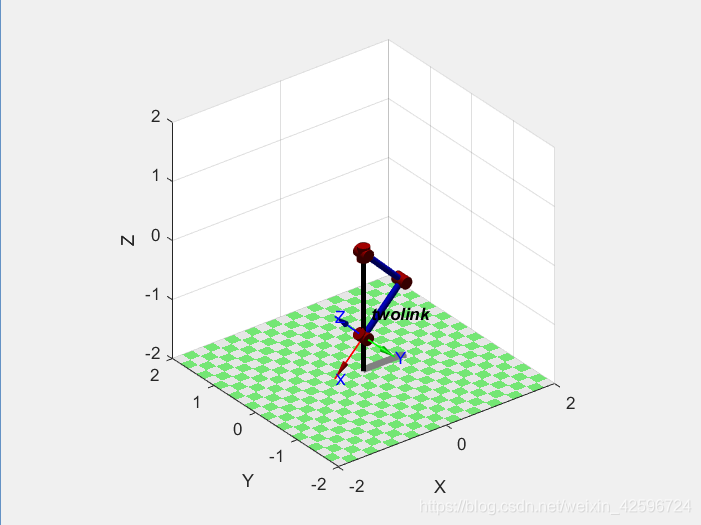
创建单腿模型
L(1)=Link([0,0,0,pi/2]);
L(2)=Link([0,0,1,0]);
L(3)=Link([0,0,1,0]);
L(4)=Link([0,0,0,pi/2]);
L(5)=Link([0,0,0,0]);
L(6)=Link([0,0,0,0]);
two_link=SerialLink(L,'name','twolink');
其中1456是为了使用内置函数而设置的冗余自由度,对于该模拟无影响
期望运动轨迹:
位姿状态T1:
位姿状态T2:
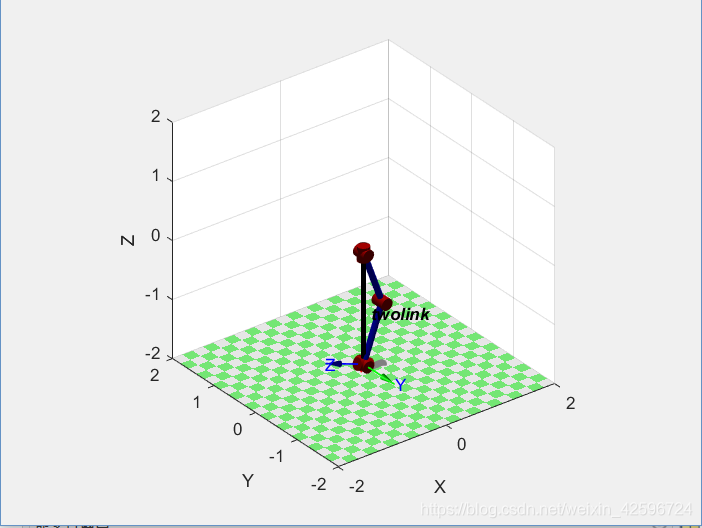
键入初始和结束关节角并得到变化矩阵:
qn=[0,-pi/4,-pi/2,0,0,0];
q1=[0,-70/180*pi,-40/180*pi,0,0,0];
T1=two_link.fkine(qn);
T2=two_link.fkine(q1);
设置末端执行器从T1状态移动到T2状态,用时1s,每100ms计算一次关节角
t=[0:0.1:1];
计算:
[q v a]=jtraj(qn,q1,t); %%该函数默认将始末位置的速度加速度取0或趋于0
q=
0 -0.785398163397448 -1.57079632679490 0 0 0
0 -0.789133167996716 -1.56332631759636 0 0 0
0 -0.810670530966326 -1.52025159165714 0 0 0
0 -0.856555237001257 -1.42848217958728 0 0 0
0 -0.923907492835718 -1.29377766791836 0 0 0
0 -1.00356431989674 -1.13446401379631 0 0 0
0 -1.08322114695776 -0.975150359674272 0 0 0
0 -1.15057340279222 -0.840445848005349 0 0 0
0 -1.19645810882715 -0.748676435935486 0 0 0
0 -1.21799547179676 -0.705601709996267 0 0 0
0 -1.22173047639603 -0.698131700797730 0 0 0
令s1为关节1(q中的第二列)所记录的关节角矩阵,同理得s2:
s1=q(:,2)';
s2=q(:,3)';
三次多形式拟合
p1=polyfit(t,s1,3);
p2=polyfit(t,s2,3);
f1=polyval(p1,t);
f2=polyval(p2,t);
plot(t,s1,'o',t,f1,t,s2,'x',t,f2) ;
得到曲线:
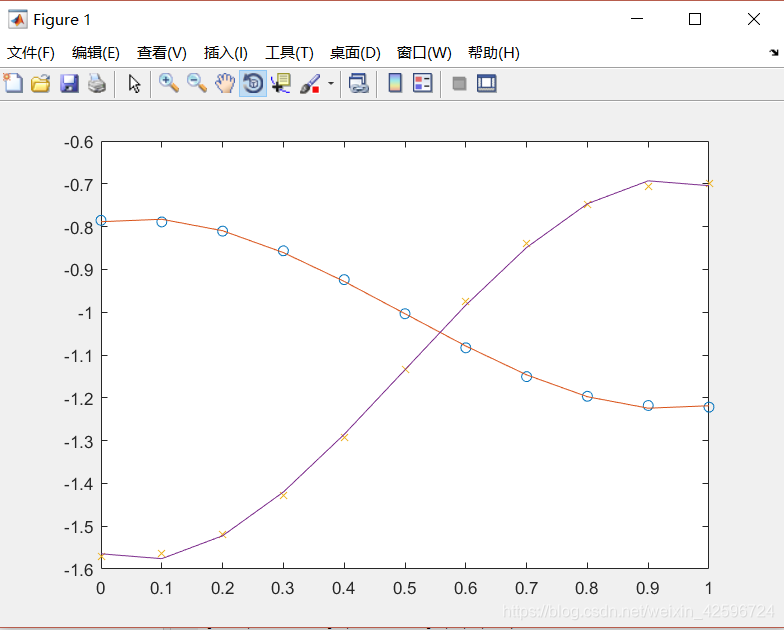
p1 =
1.3526 -2.0289 0.2463 -0.7885
p2 =
-2.7053 4.0579 -0.4925 -1.5645
我们可以得到关节1和关节2的三次多项式:
θ
1
=
1.3526
t
3
−
2.0289
t
2
+
0.2463
t
−
0.7885
\theta_1=1.3526t^3-2.0289t^2+0.2463t-0.7885
θ
1
=
1
.
3
5
2
6
t
3
−
2
.
0
2
8
9
t
2
+
0
.
2
4
6
3
t
−
0
.
7
8
8
5
θ
2
=
−
2.7053
t
3
+
4.0579
t
2
−
0.4925
t
−
1.5645
\theta_2=-2.7053t^3+4.0579t^2-0.4925t-1.5645
θ
2
=
−
2
.
7
0
5
3
t
3
+
4
.
0
5
7
9
t
2
−
0
.
4
9
2
5
t
−
1
.
5
6
4
5
以上是比较特殊的情况,接下来将讨论更为一般的情况
实际上只要能给出末端执行器的位姿随时间的变化,我们就能得到各关节的运动参数