- 基本概念
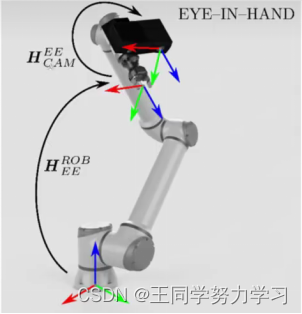
相机固定在机械臂末端,机械臂移动相机也随之移动。主要标定求解相机坐标系和机械臂末端坐标系之间的转换矩阵。
- 涉及坐标系
机械臂基坐标系(base)、机械臂末端坐标系(gripper)、相机坐标系(camera)以及标定板坐标系(target)。eye-in-hand即为求解相机坐标系camera和机械臂末端坐标系gripper之间的转换矩阵
。
- 标定基本流程(原理)
取标定板坐标系中一点
,该点转换至相机坐标系中记为点
,在机械臂末端坐标系中记为点
,在基底坐标系中记为点
,则有:
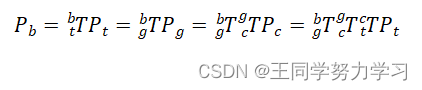
从该式中可得出:

其中
为标定板坐标系到机械臂基坐标系的转换矩阵,为定值,
为求解目标矩阵。则至少有两个不同机械臂位姿(从不同角度捕捉棋盘格图像)标定即可求出
矩阵,为:

其中①
求法:由机械臂示教器得到机械臂末端位姿变换参数(位移XYZ和角度
)后得到机械臂末端在基坐标系下的位姿表示,即转换矩阵的旋转矩阵
和平移矩阵
,再组成4×4齐次变换矩阵即为
。
②
求法:为标定板坐标系到相机坐标系的变换矩阵,该矩阵由相机内参及畸变参数即可求得相应的旋转和平移矩阵并构成4×4齐次变换矩阵即为
。
版权声明:本文为wmyxfpa原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。