数据准备:
将rosbag包转成TXT文件的命令:
rostopic echo -b 2023-04-01-11-01-25.bag /imu > 1.txt转换结果如图所示(其中的一帧数据):
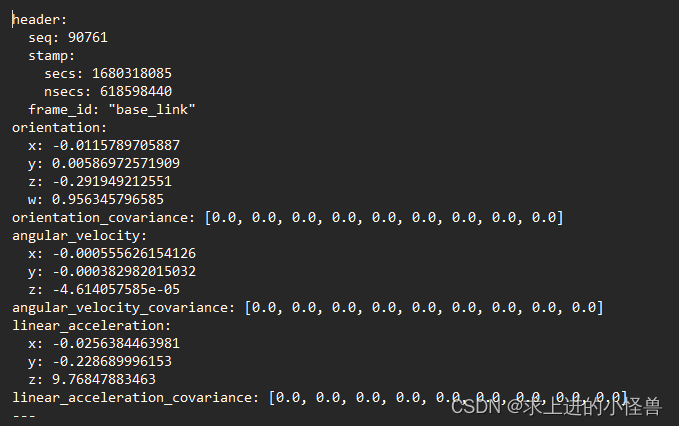
1.MATLAB数据提取
针对文本格式,使用MATLAB提取文本中的四元数、线加速度及角加速度数据,分别存为orientation.txt、acceleration.txt、angle_velocity.txt文件。
使用函数:
-
fid = fopen(‘1.txt’,’r’); %读取源文件
-
tline = fgets(fid); %读取文件中的一行
-
[ln,~,~,n] = sscanf(tline,’%s’,1);
-
tline1=tline(k1:end); %截取本行所需要的数据部分
sscanf
函数:
函数:
[
A
,
n
,
errmsg
,
nextindex
] = sscanf
(
str
,
formatSpec
,
sizeA
)
A:从
str
读取数据,根据
formatSpec
指定的格式对其进行转换,并将结果返回到数组中。 如果
str
是一个包含多行的字符数组,
sscanf
以列顺序读取字符。n: 返回
sscanf
成功读入
A
的元素数。errmsg:在
sscanf
无法将所有数据读入
A
时返回包含错误消息的字符向量。nextindex:返回
str
中紧跟在由
sscanf
扫描的最后一个字符之后的位置的索引。
2.MATLAB浮点型长度设置
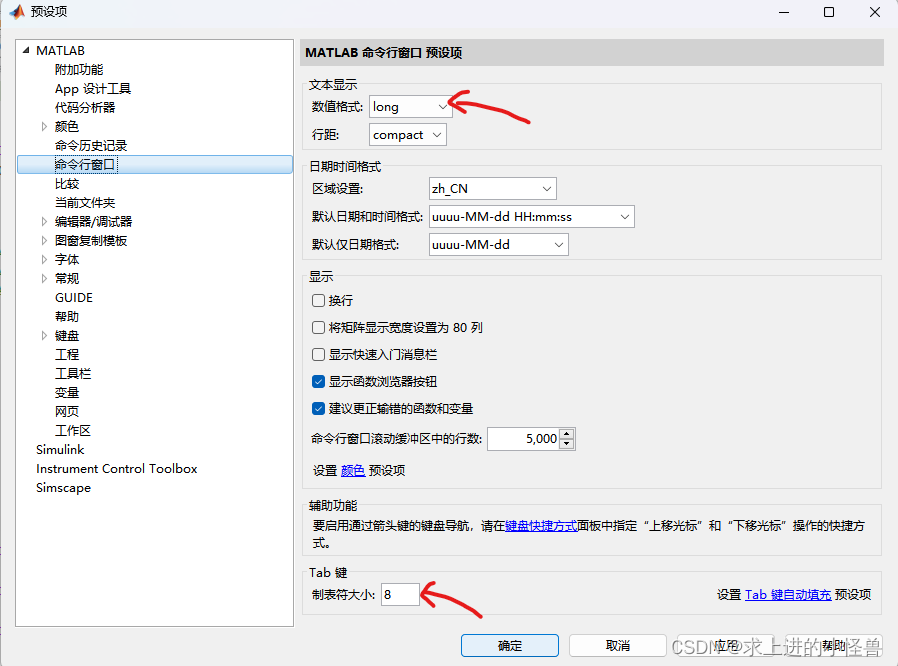
1)打开MATLAB上的设置

2) 在命令行窗口中,设置数值格式为long, 并修改制表符大小为8位。即可修改MATLAB记录及打印数值的小数点后位数。
默认长度:

修改后长度:
在写入数据时,需要确定数据格式(确定数据位数):
fprintf(fid,’%15.12f ‘,angle_velocity.w_x(i)); % %15.12f 表示共占15位,小数点后记录12位
文件写入代码:
fid = fopen('orientation_3.txt','w');
for i = 1 : length(ori_Var.o_x) %%浮点数保留12位小数
fprintf(fid,'%8.2f ',time_stamp(i));
fprintf(fid,'%15.12f ',ori_Var.o_x(i));
fprintf(fid,'%15.12f ',ori_Var.o_y(i));
fprintf(fid,'%15.12f ',ori_Var.o_z(i));
fprintf(fid,'%15.12f \n',ori_Var.o_w(i));
end
fclose(fid);
MATLAB代码:
clear all;
close all;
time_stamp = []; %%数据以100Hz的频率记录
time = 0;
time_interval = 0.01;
ori_Var.o_x = []; %四元素数据
ori_Var.o_y = [];
ori_Var.o_z = [];
ori_Var.o_w = [];
angle_velocity.w_x = []; %角速度数据
angle_velocity.w_y = [];
angle_velocity.w_z = [];
acceleration.a_x = []; %加速度数据
acceleration.a_y = [];
acceleration.a_z = [];
fid = fopen('1.txt','r'); %读取文本文件
tline = fgets(fid);
while tline ~= -1
[ln,~,~,n] = sscanf(tline,'%s',1);
if ln=="orientation:" %匹配数据种类
tline = fgets(fid); %读取文本中的一行数据
k1 = strfind(tline, 'x');
if k1>0
k1=k1+2; %跳过数据开头的 x: ,两个字符
tline1=tline(k1:end);
x = sscanf(tline1,'%f',1); %数据由字符型转换为浮点型
%MATLAB浮点数默认为小数点后4位,其他长度需自行设定
ori_Var.o_x = [ori_Var.o_x;x];%将数据累计到数组中,方便操作
end
tline = fgets(fid);
k1 = strfind(tline, 'y');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
y = sscanf(tline1,'%f',1);
ori_Var.o_y = [ori_Var.o_y;y];
end
tline = fgets(fid);
k1 = strfind(tline, 'z');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
z = sscanf(tline1,'%f',1);
ori_Var.o_z = [ori_Var.o_z;z];
end
tline = fgets(fid);
k1 = strfind(tline, 'w');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
w = sscanf(tline1,'%f',1);
ori_Var.o_w = [ori_Var.o_w;w];
end
time = time + time_interval;
time_stamp = [time_stamp;time];
end
%%角速度数据
if ln=="angular_velocity:"
tline = fgets(fid);
k1 = strfind(tline, 'x');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
x = sscanf(tline1,'%f',1);
angle_velocity.w_x = [angle_velocity.w_x;x];
end
tline = fgets(fid);
k1 = strfind(tline, 'y');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
y = sscanf(tline1,'%f',1);
angle_velocity.w_y = [angle_velocity.w_y;y];
end
tline = fgets(fid);
k1 = strfind(tline, 'z');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
z = sscanf(tline1,'%f',1);
angle_velocity.w_z = [angle_velocity.w_z;z];
end
end
%%加速度数据
if ln=="linear_acceleration:"
tline = fgets(fid);
k1 = strfind(tline, 'x');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
x = sscanf(tline1,'%f',1);
acceleration.a_x = [acceleration.a_x;x];
end
tline = fgets(fid);
k1 = strfind(tline, 'y');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
y = sscanf(tline1,'%f',1);
acceleration.a_y = [acceleration.a_y;y];
end
tline = fgets(fid);
k1 = strfind(tline, 'z');
if k1>0
k1=k1+2;
tline1=tline(k1:end);
z = sscanf(tline1,'%f',1);
acceleration.a_z = [acceleration.a_z;z];
end
end
tline = fgets(fid);
end
fclose(fid);
disp("read data well! ");
fid = fopen('orientation_1.txt','w'); %%新建或打开文件,进行写操作
for i = 1 : length(ori_Var.o_x) %%浮点数保留12位小数,时间保留两位小数
fprintf(fid,'%8.2f ',time_stamp(i));
fprintf(fid,'%15.12f ',ori_Var.o_x(i));
fprintf(fid,'%15.12f ',ori_Var.o_y(i));
fprintf(fid,'%15.12f ',ori_Var.o_z(i));
fprintf(fid,'%15.12f \n',ori_Var.o_w(i));
end
fclose(fid); %%关闭文件
disp("orientation write well.");
fid = fopen('angle_velocity_1.txt','w');
for i = 1 : length(angle_velocity.w_x) %%浮点数保留12位小数
fprintf(fid,'%8.2f ',time_stamp(i));
fprintf(fid,'%15.12f ',angle_velocity.w_x(i));
fprintf(fid,'%15.12f ',angle_velocity.w_y(i));
fprintf(fid,'%15.12f \n',angle_velocity.w_z(i));
end
fclose(fid);
disp("angle_velocity write well.");
fid = fopen('acceleration_1.txt','w');
for i = 1 : length(acceleration.a_x) %%浮点数保留12位小数
fprintf(fid,'%8.2f ',time_stamp(i));
fprintf(fid,'%15.12f ',acceleration.a_x(i));
fprintf(fid,'%15.12f ',acceleration.a_y(i));
fprintf(fid,'%15.12f \n',acceleration.a_z(i));
end
fclose(fid);
disp("acceleration write well.");
文件及数据已上传至阿里云盘: