一、前言
1、简介
写的这篇博客,是为了简单讲解一下UART通信协议,以及UART能够实现的一些功能,还有有关使用STM32CubeMX来配置芯片的一些操作,在后面我会以我使用的STM32F429开发板来举例讲解(其他STM32系列芯片大多数都可以按照这些步骤来操作的),如有不足请多多指教。
2、UART简介
嵌入式开发中,UART串口通信协议是我们常用的通信协议(UART、I2C、SPI等)之一,全称叫做通用异步收发传输器(Universal Asynchronous Receiver/Transmitter)。
3、准备工作
1)Keil5
链接:点击
下载
提取码:wrt9
2)STMCubeMX5.1.0版本
链接:点击
下载
提取码:20xs
3)STMF429开发板

注:
只要是stm32的开发板都可以用到的,在STM32CubeMx里选对型号、配置好就行了。
二、UART详解
1、UART简介
嵌入式开发中,UART串口通信协议是我们常用的通信协议(UART、I2C、SPI等)之一,全称叫做通用异步收发传输器(Universal Asynchronous Receiver/Transmitter),是异步串口通信协议的一种,工作原理是将传输数据的每个字符一位接一位地传输,它能将要传输的资料在串行通信与并行通信之间加以转换,能够灵活地与外部设备进行全双工数据交换。
注:
在此开发板中,是有USART(Universal Synchronous Asynchronous Receiver and Transmitter通用同步异步收发器)串口的,USART相当于UART的升级版,USART支持同步模式,因此USART 需要同步始终信号USART_CK(如STM32 单片机),通常情况同步信号很少使用,因此一般的单片机UART和USART使用方式是一样的,都使用异步模式。因为USART的使用方法上跟UART基本相同,所以在此就以UART来讲该通信协议了。
2、UART通信协议
1)起始位
当未有数据发送时,数据线处于逻辑“1”状态;先发出一个逻辑“0”信号,表示开始传输字符。
2)数据位
紧接着起始位之后。资料位的个数可以是4、5、6、7、8等,构成一个字符。通常采用ASCII码。从最低位开始传送,靠时钟定位。
3)奇偶校验位
资料为加上这一位后,使得“1”的位数应为偶数(偶校验)或奇数(奇校验),以此来校验资料传送的正确性。
4)停止位
它是一个字符数据的结束标志。可以是1位、1.5位、2位的高电平。 由于数据是在传输线上定时的,并且每一个设备有其自己的时钟,很可能在通信中两台设备间出现了小小的不同步。因此停止位不仅仅是表示传输的结束,并且提供计算机校正时钟同步的机会。适用于停止位的位数越多,不同时钟同步的容忍程度越大,但是数据传输率同时也越慢。
5)空闲位或起始位
处于逻辑“1”状态,表示当前线路上没有资料传送,进入空闲状态。
处于逻辑“0”状态,表示开始传送下一数据段。
6)波特率
表示每秒钟传送的码元符号的个数,是衡量数据传送速率的指标,它用单位时间内载波调制状态改变的次数来表示。
常用的波特率有:9600、115200……
时间间隔计算:1秒除以波特率得出的时间,例如,波特率为9600的时间间隔为1s / 9600(波特率) = 104us。
3、UART功能说明
接口通过三个引脚从外部连接到其它设备。任何 USART 双向通信均需要 至少两个引脚:接收数据输入引脚 (RX) 和发送数据引脚输出 (TX):
RX:
接收数据输入引脚就是串行数据输入引脚。过采样技术可区分有效输入数据和噪声,从而用于恢复数据。
TX:
发送数据输出引脚。如果关闭发送器,该输出引脚模式由其 I/O 端口配置决定。如果使 能了发送器但没有待发送的数据,则 TX 引脚处于高电平。在单线和智能卡模式下,该 I/O 用于发送和接收数据(USART 电平下,随后在 SW_RX 上接收数据)。
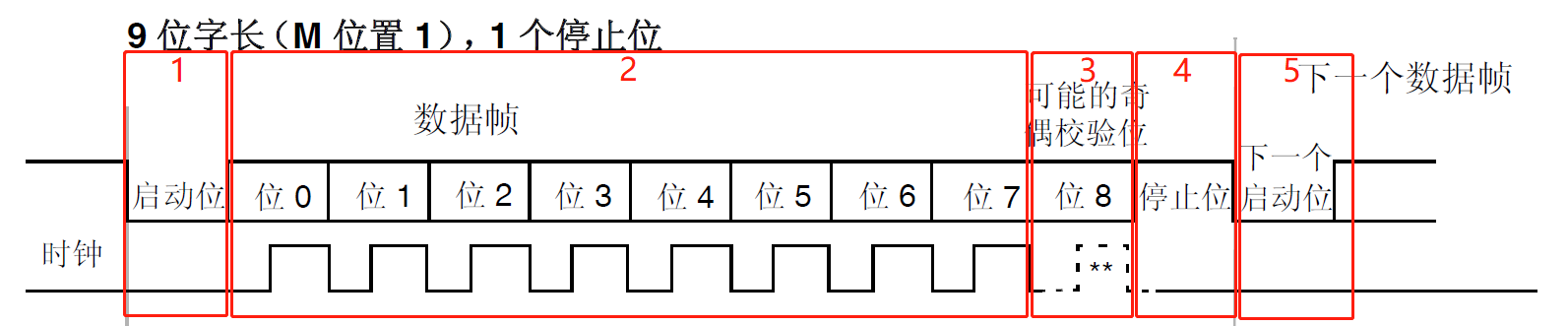
1)正常 USART 模式下,通过这些引脚以帧的形式发送和接收串行数据:
- 发送或接收前保持空闲线路
- 起始位
- 数据(字长 8 位或 9 位),最低有效位在前
- 用于指示帧传输已完成的 0.5 个、1 个、1.5 个、2 个停止位
- 该接口使用小数波特率发生器 – 带 12 位尾数和 4 位小数
- 状态寄存器 (USART_SR)
- 数据寄存器 (USART_DR)
- 波特率寄存器 (USART_BRR) – 12 位尾数和 4 位小数。
- 智能卡模式下的保护时间寄存器 (USART_GTPR)。
2)在同步模式下连接时需要以下引脚:
- SCLK:发送器时钟输出。该引脚用于输出发送器数据时钟,以便按照 SPI 主模式进行同步发送(起始位和结束位上无时钟脉冲,可通过软件向最后一个数据位发送时钟脉冲)。RX 上可同步接收并行数据。这一点可用于控制带移位寄存器的外设(如 LCD 驱动器)。时钟相位和极性可通过软件编程。在智能卡模式下,SCLK 可向智能卡提供时钟。在硬件流控制模式下需要以下引脚:
- nCTS:“清除以发送”用于在当前传输结束时阻止数据发送(高电平时)。
- nRTS:“请求以发送”用于指示 USART 已准备好接收数据(低电平时)。
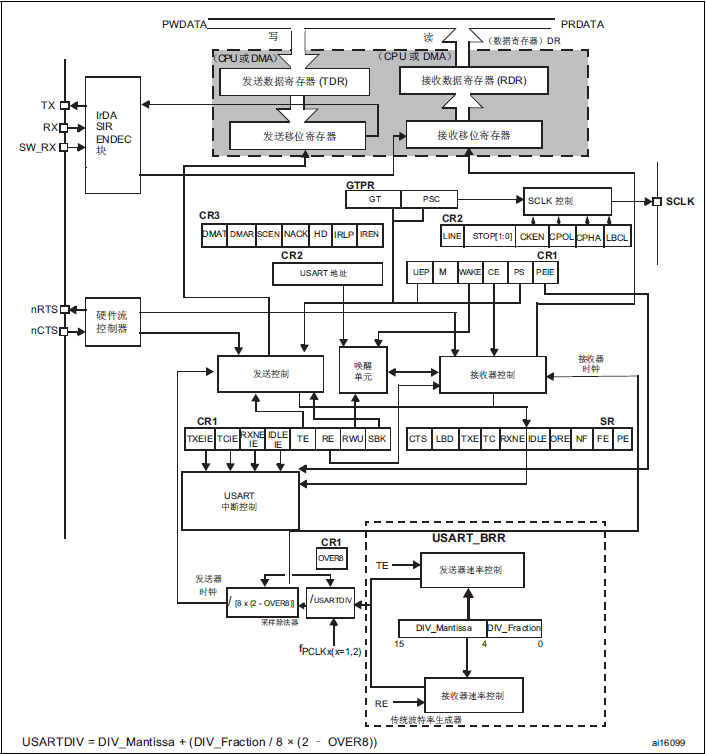
USART框图如下:
4、UART工作原理
1)发送接收
2)波特率产生
波特率除数(baud-rate divisor)是一个22 位数,它由16 位整数和6 位小数组成。波特率发生器使用这两个值组成的数字来决定位周期。通过带有小数波特率的除法器,在足够高的系统时钟速率下,UART 可以产生所有标准的波特率,而误差很小。
3)数据收发
发送时,数据被写入发送FIFO。如果UART 被使能,则会按照预先设置好的参数(波特率、数据位、停止位、校验位等)开始发送数据,一直到发送FIFO 中没有数据。一旦向发送FIFO 写数据(如果FIFO 未空),UART 的忙标志位BUSY 就有效,并且在发送数据期间一直保持有效。BUSY 位仅在发送FIFO 为空,且已从移位寄存器发送最后一个字符,包括停止位时才变无效。即 UART 不再使能,它也可以指示忙状态。
在UART 接收器空闲时,如果数据输入变成“低电平”,即接收到了起始位,则接收计数器开始运行,并且数据在Baud16 的第8 个周期被采样。如果Rx 在Baud16 的第8 周期仍然为低电平,则起始位有效,否则会被认为是错误的起始位并将其忽略。
4)中断控制
出现以下情况时,可使UART 产生中断:
-
FIFO 溢出错误
-
线中止错误(line-break,即Rx 信号一直为0 的状态,包括校验位和停止位在内)
-
奇偶校验错误
-
帧错误(停止位不为1)
-
接收超时(接收FIFO 已有数据但未满,而后续数据长时间不来)
-
发送
-
接收
由于所有中断事件在发送到中断控制器之前会一起进行“或运算”操作,所以任意时刻 UART 只能向中断产生一个中断请求。通过查询中断状态函数,软件可以在同一个中断服务函数里处理多个中断事件(多个并列的if 语句)。
5)FIFO 操作
FIFO 是“First-In First-Out”的缩写,意为“先进先出”,是一种常见的队列操作。 Stellaris 系列ARM 的UART 模块包含有2 个16 字节的FIFO:一个用于发送,另一个用于接收。可以将两个FIFO 分别配置为以不同深度触发中断。可供选择的配置包括:1/8、 1/4、1/2、3/4 和7/8 深度。例如,如果接收FIFO 选择1/4,则在UART 接收到4 个数据时产生接收中断。
发送FIFO的基本工作过程:
只要有数据填充到发送FIFO 里,就会立即启动发送过程。由于发送本身是个相对缓慢的过程,因此在发送的同时其它需要发送的数据还可以继续填充到发送 FIFO 里。当发送 FIFO 被填满时就不能再继续填充了,否则会造成数据丢失,此时只能等待。这个等待并不会很久,以9600 的波特率为例,等待出现一个空位的时间在1ms 上下。发送 FIFO 会按照填入数据的先后顺序把数据一个个发送出去,直到发送 FIFO 全空时为止。已发送完毕的数据会被自动清除,在发送FIFO 里同时会多出一个空位。
接收FIFO的基本工作过程:
当硬件逻辑接收到数据时,就会往接收FIFO 里填充接收到的数据。程序应当及时取走这些数据,数据被取走也是在接收FIFO 里被自动删除的过程,因此在接收 FIFO 里同时会多出一个空位。如果在接收 FIFO 里的数据未被及时取走而造成接收FIFO 已满,则以后再接收到数据时因无空位可以填充而造成数据丢失。
6)回环操作
UART 可以进入一个内部回环(Loopback)模式,用于诊断或调试。在回环模式下,从Tx 上发送的数据将被Rx 输入端接收。
三、CubeMx配置
说明:
在使用STM32CubeMx配置的时候,首先要选择正在使用的芯片的型号,再配置芯片的时钟,然后才去配置所需要用到的功能。
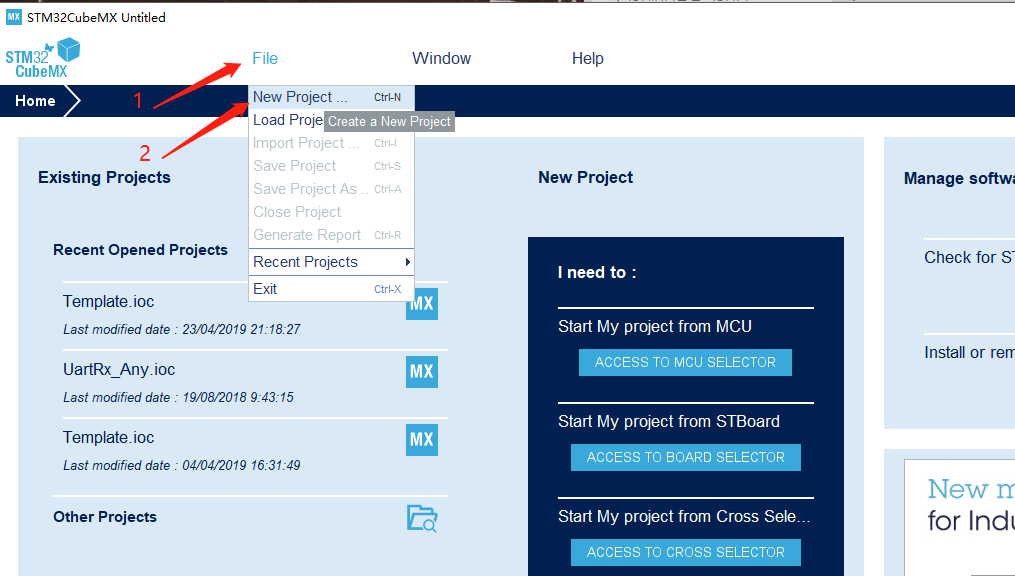
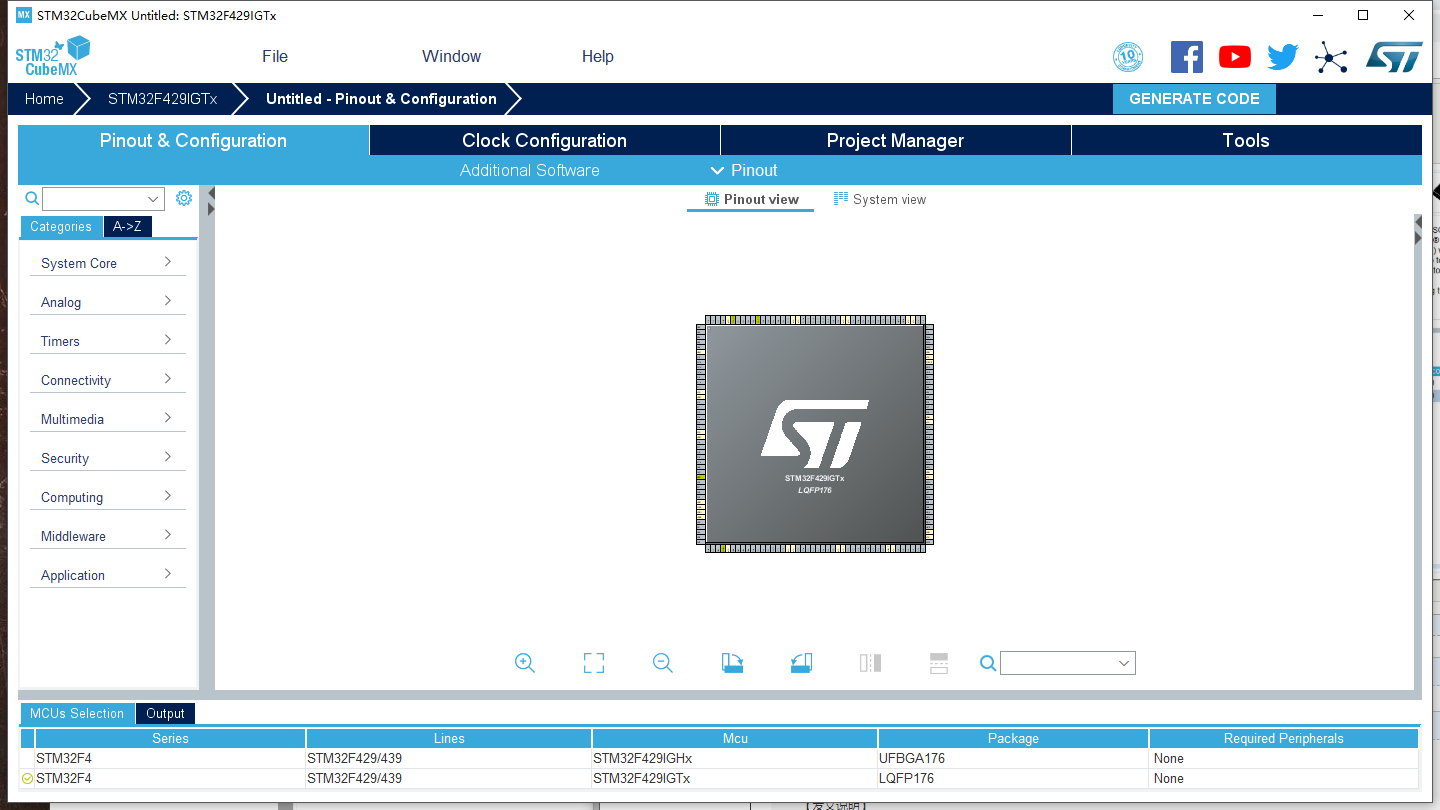
1、新建项目
1)选择新建
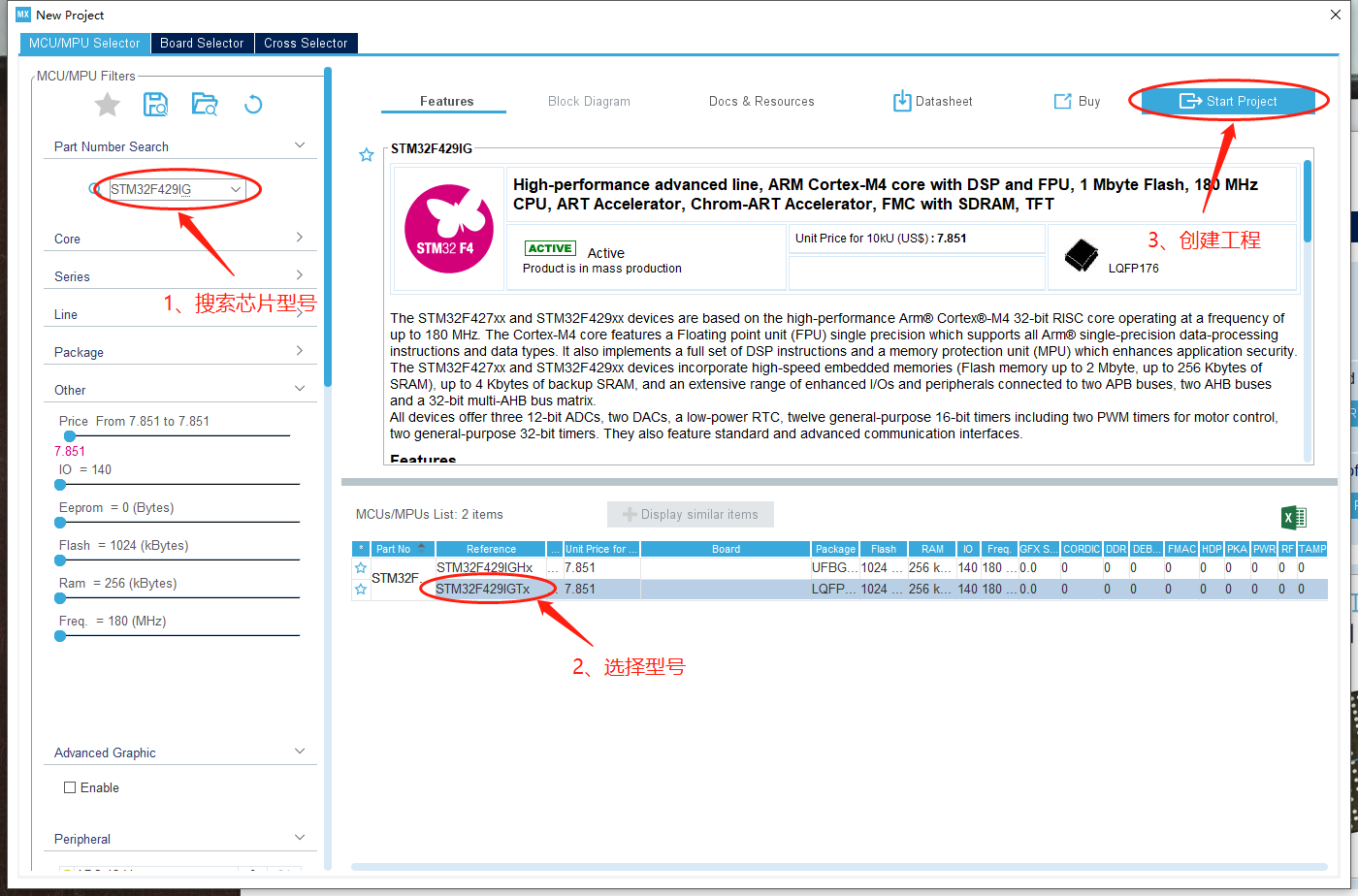
2)选择芯片型号
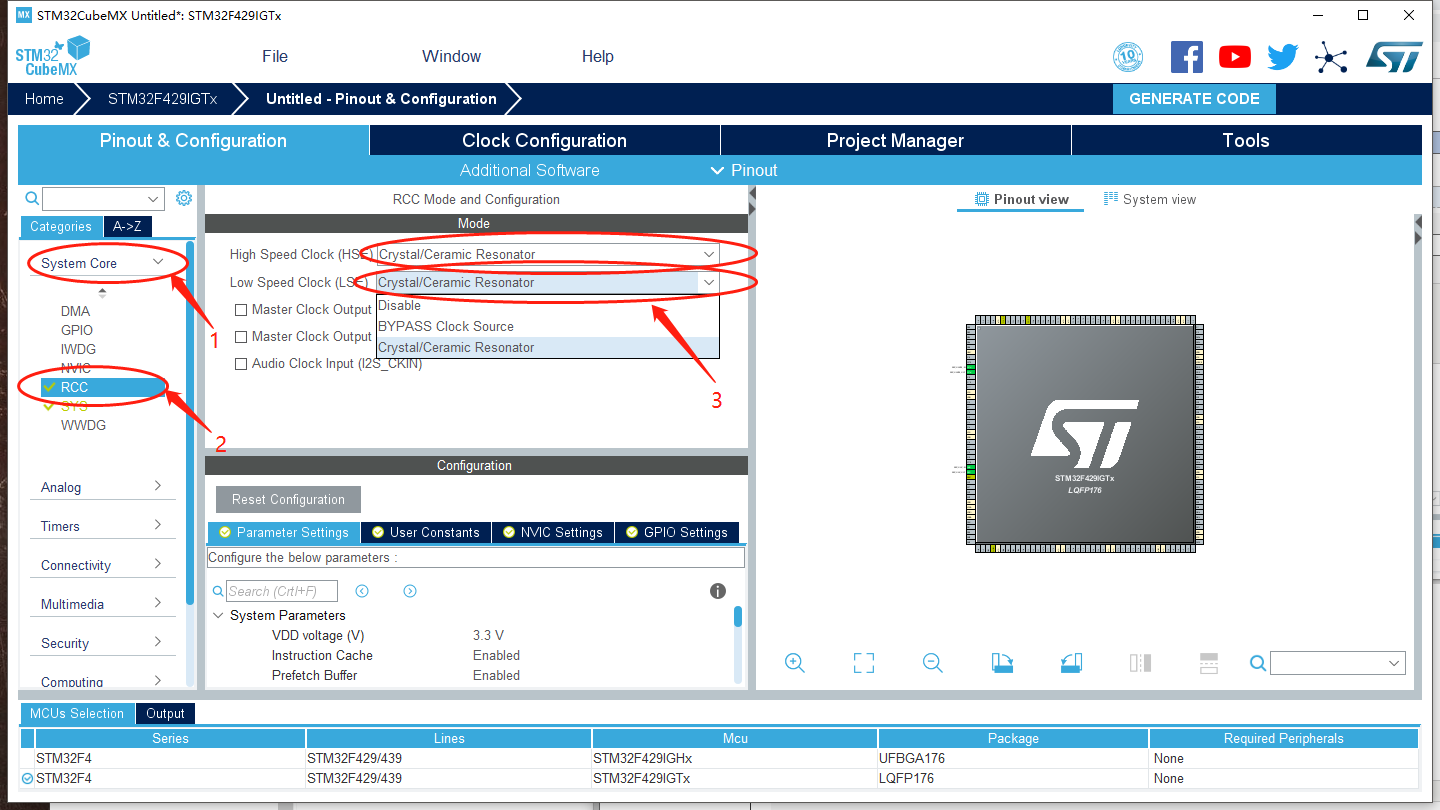
2、时钟配置
1)配置界面
2)时钟模式配置
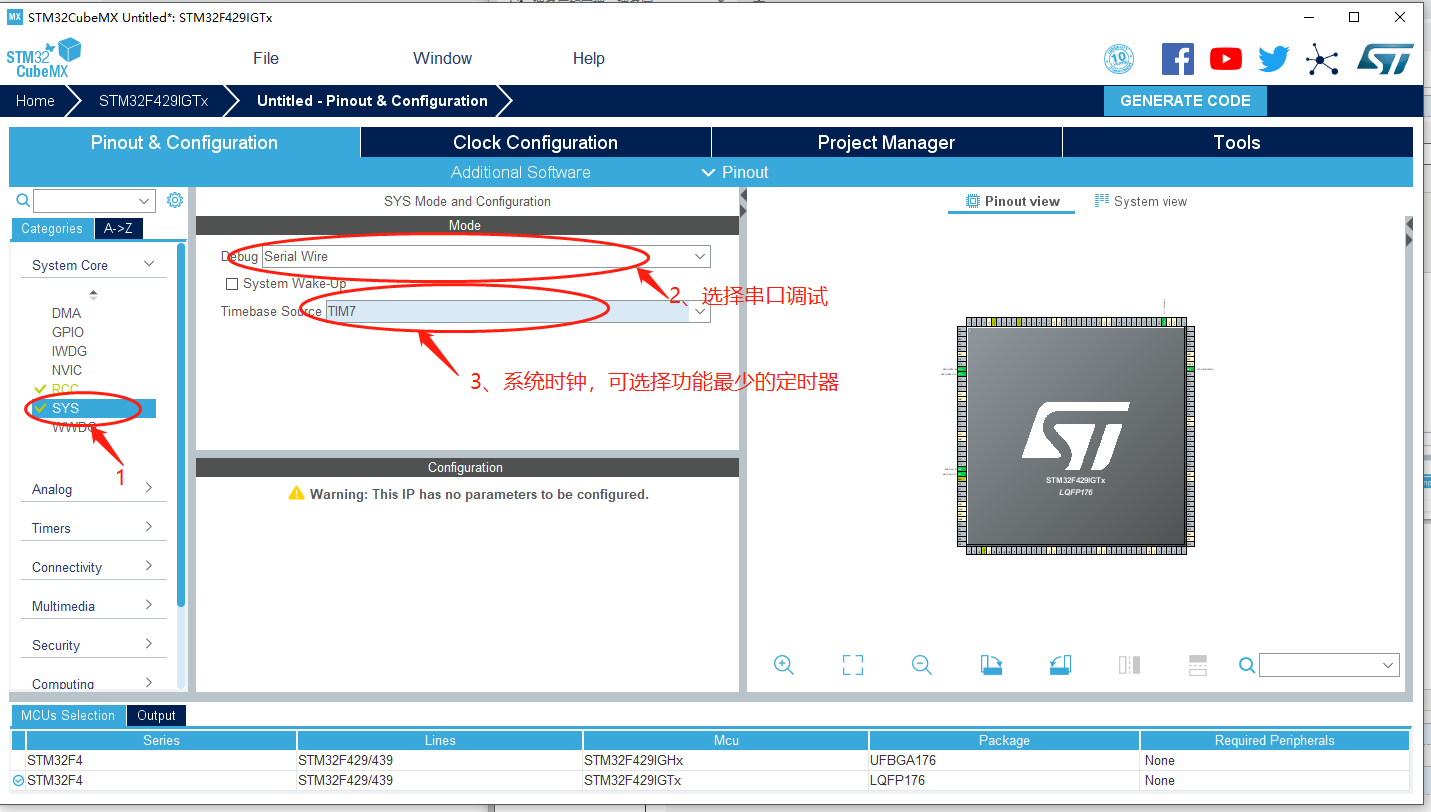
3)设置调试接口
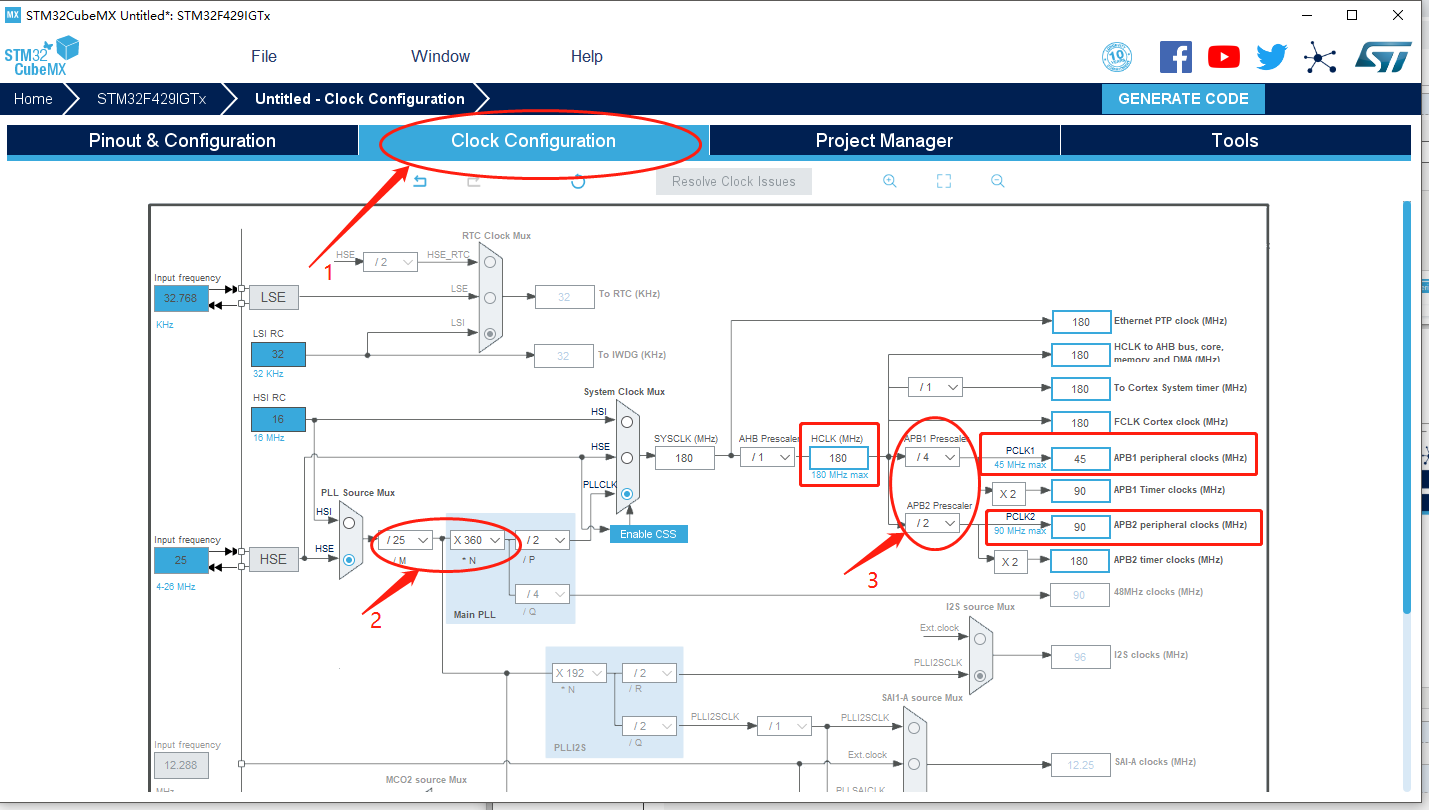
4)时钟配置(尽量将下面方框内的值设成最高值即可)
3、功能配置
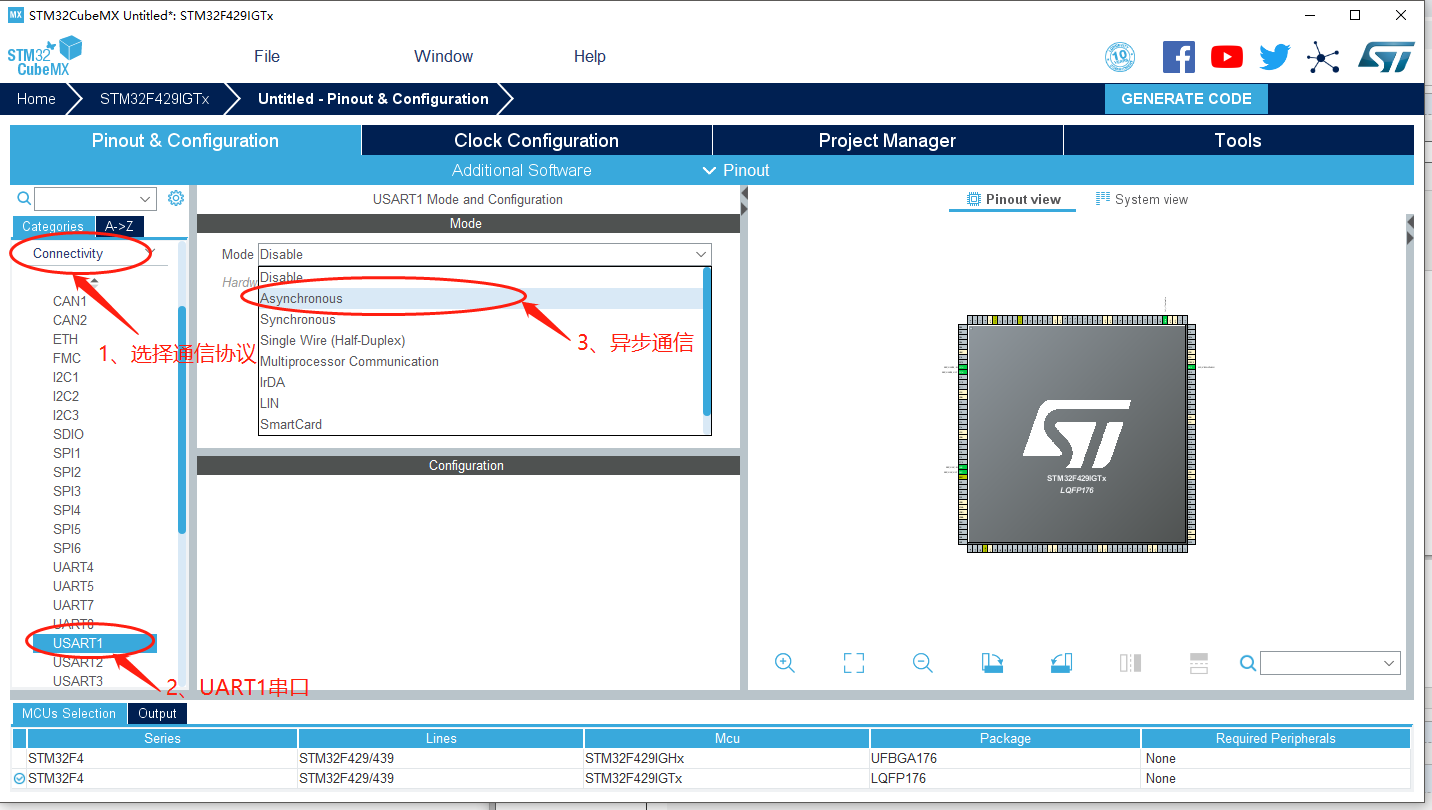
1)启用串口
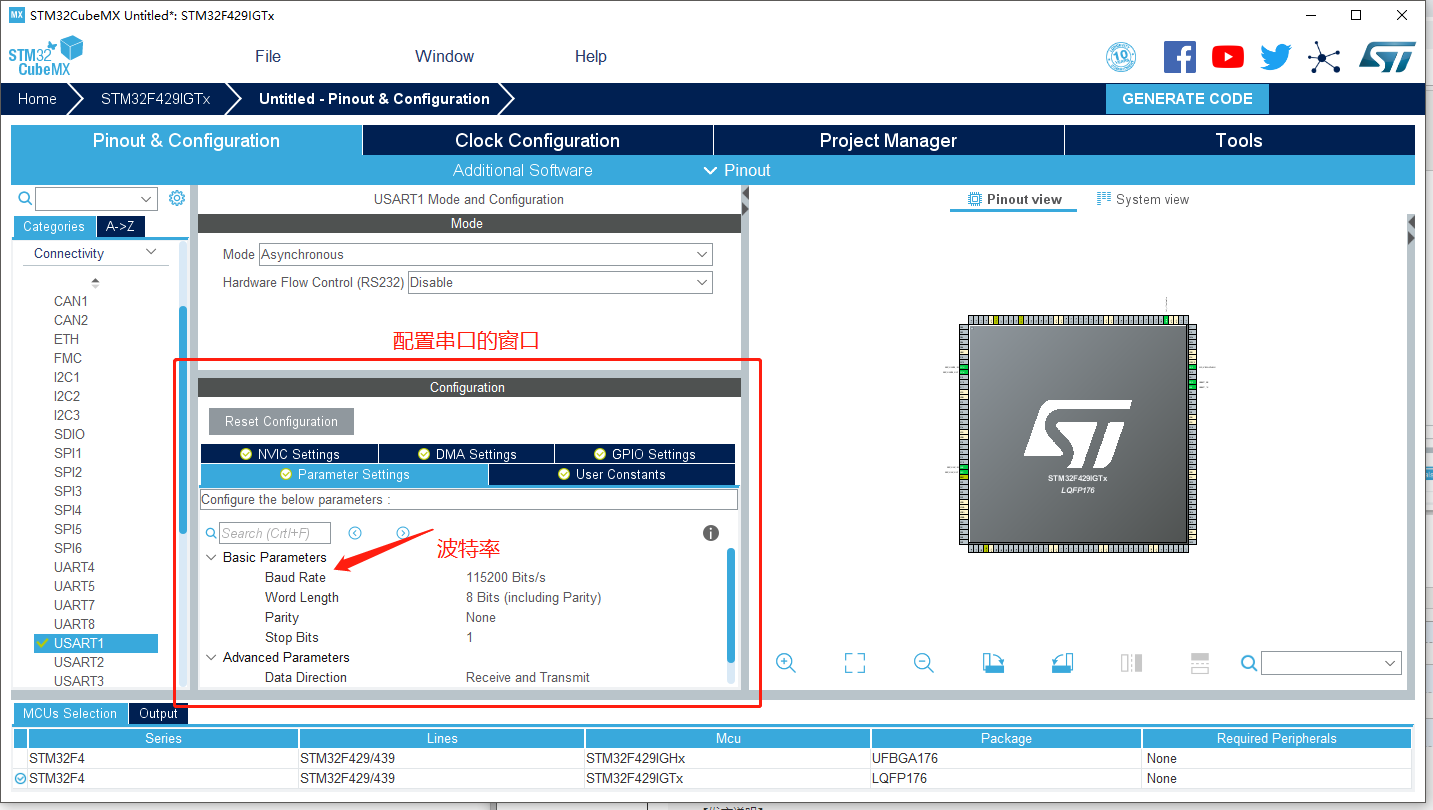
2)配置串口(默认即可,波特率为115200)
4、生成工程
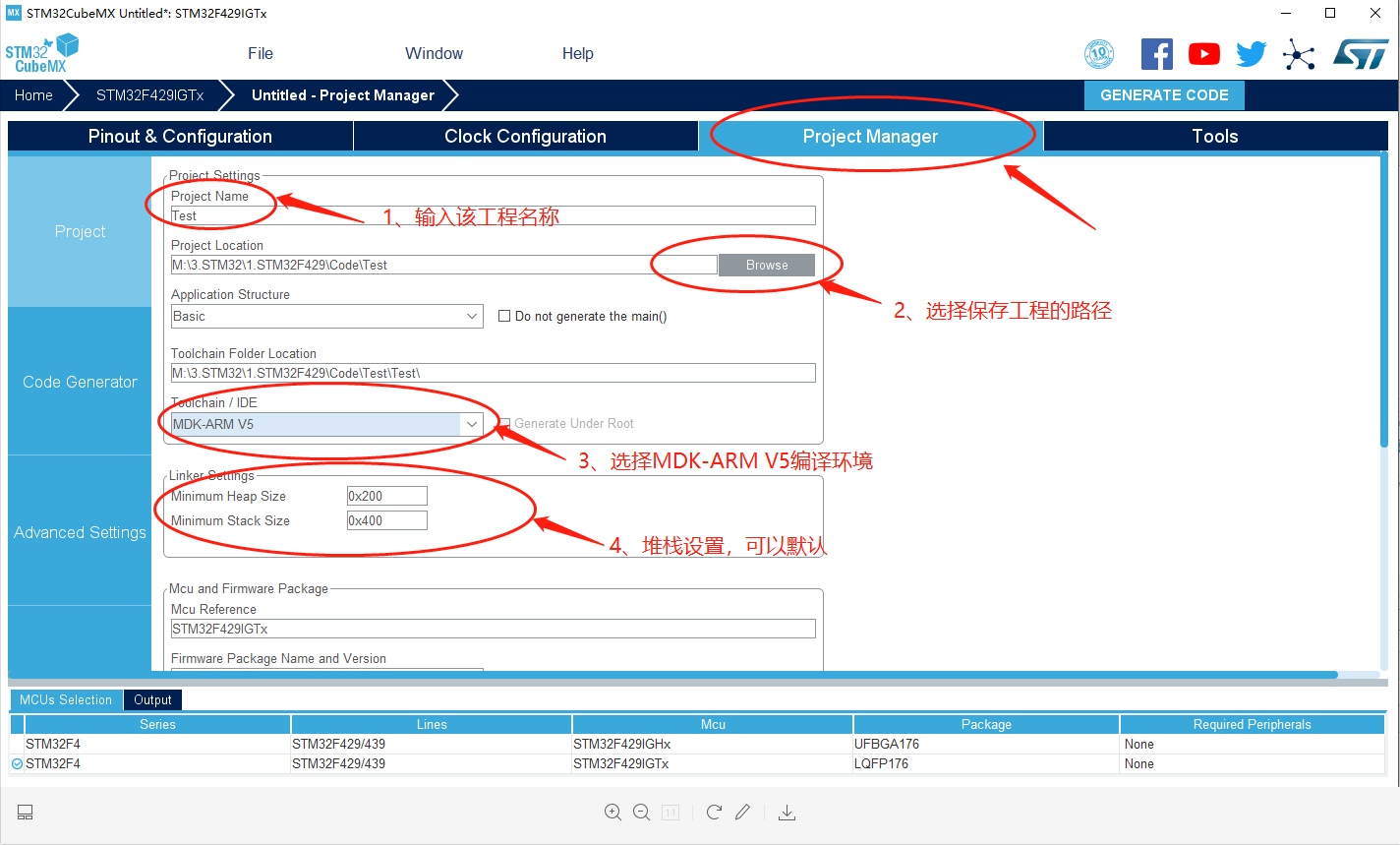
1)项目信息设置
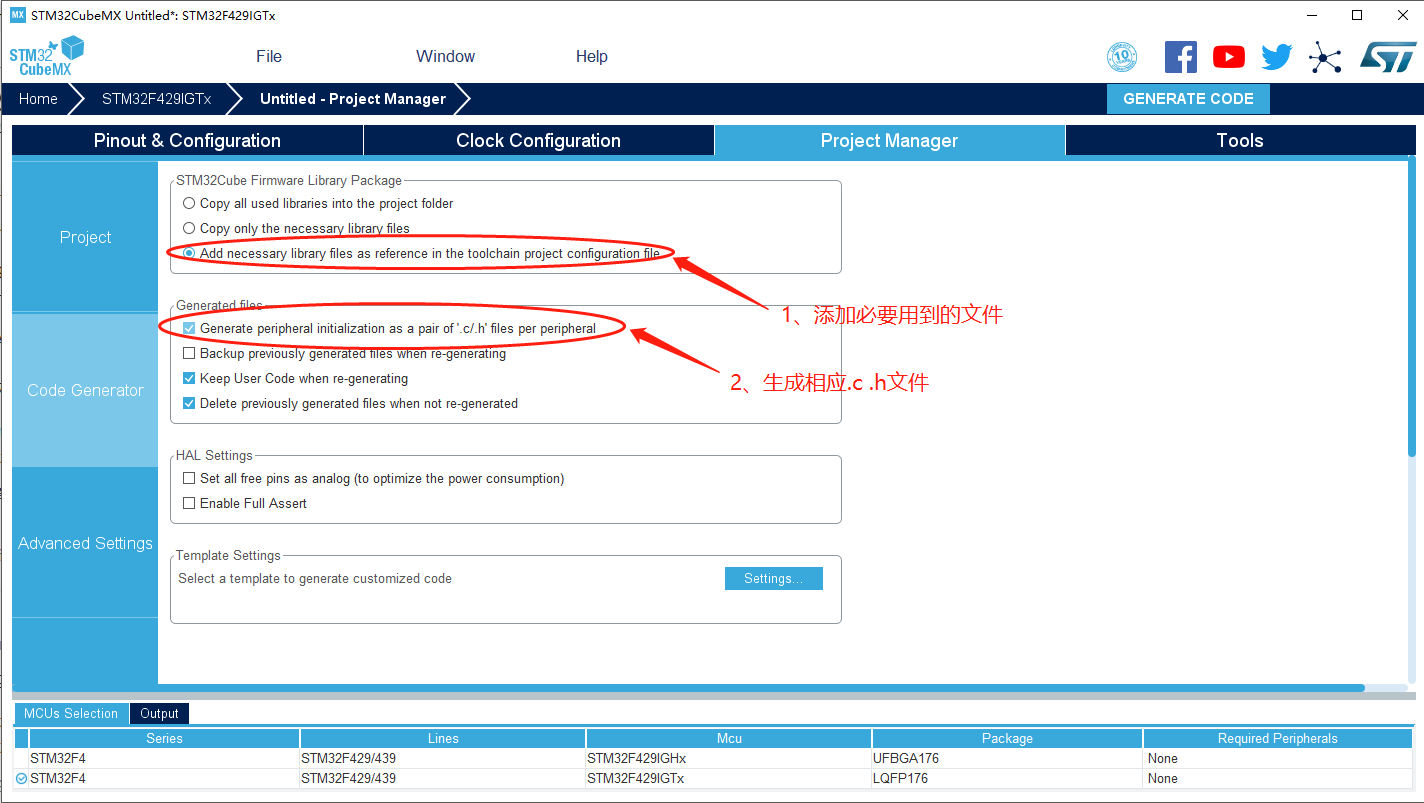
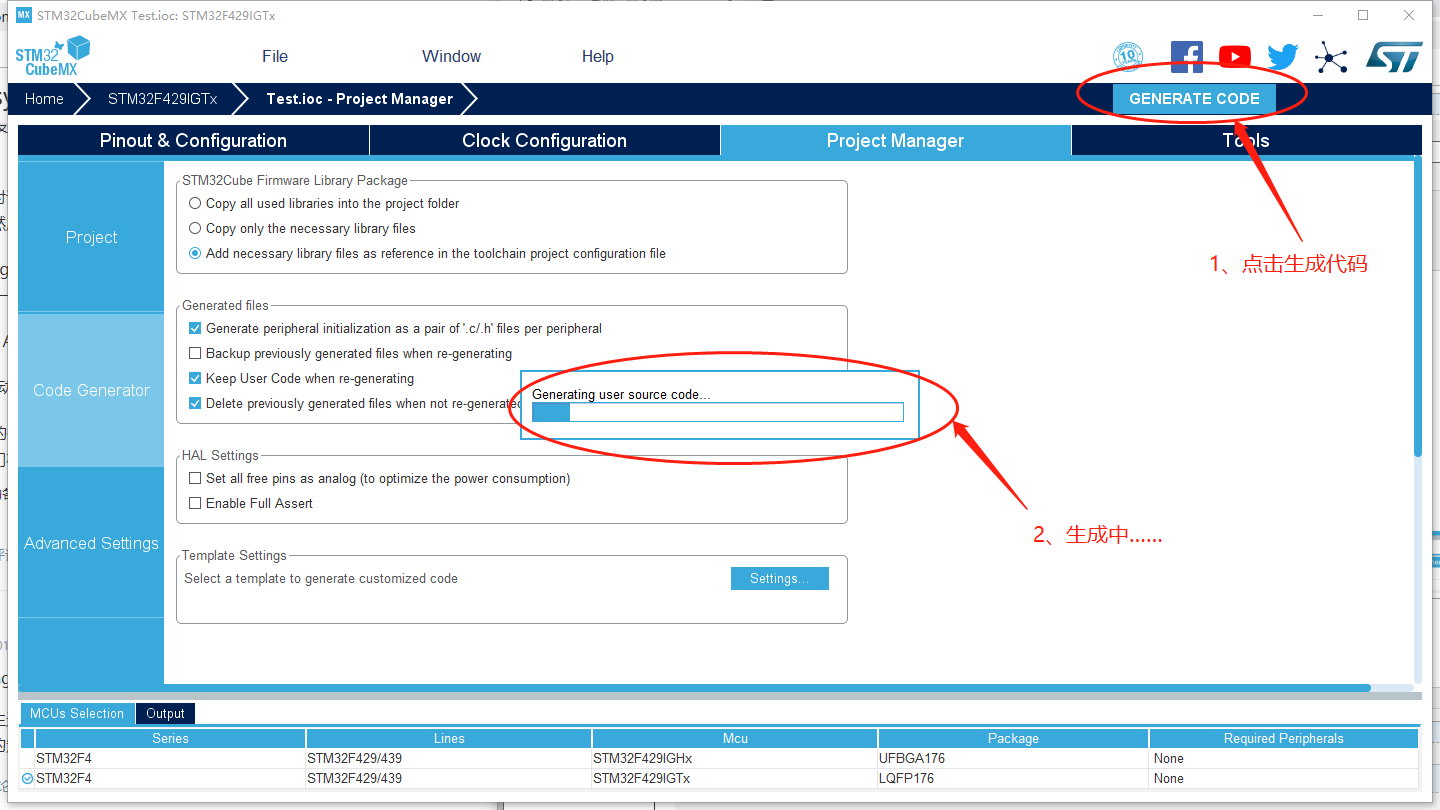
2)选择生成必要的代码
3)生成代码
4)打开项目(生成代码成功后会弹出窗口,可以直接打开工程)
注:
因为STM32CubeMX自动生成的代码中,没有设置把每次下载烧写都重置一下,所以生成代码后,我们需要自己选上该功能,步骤如下:
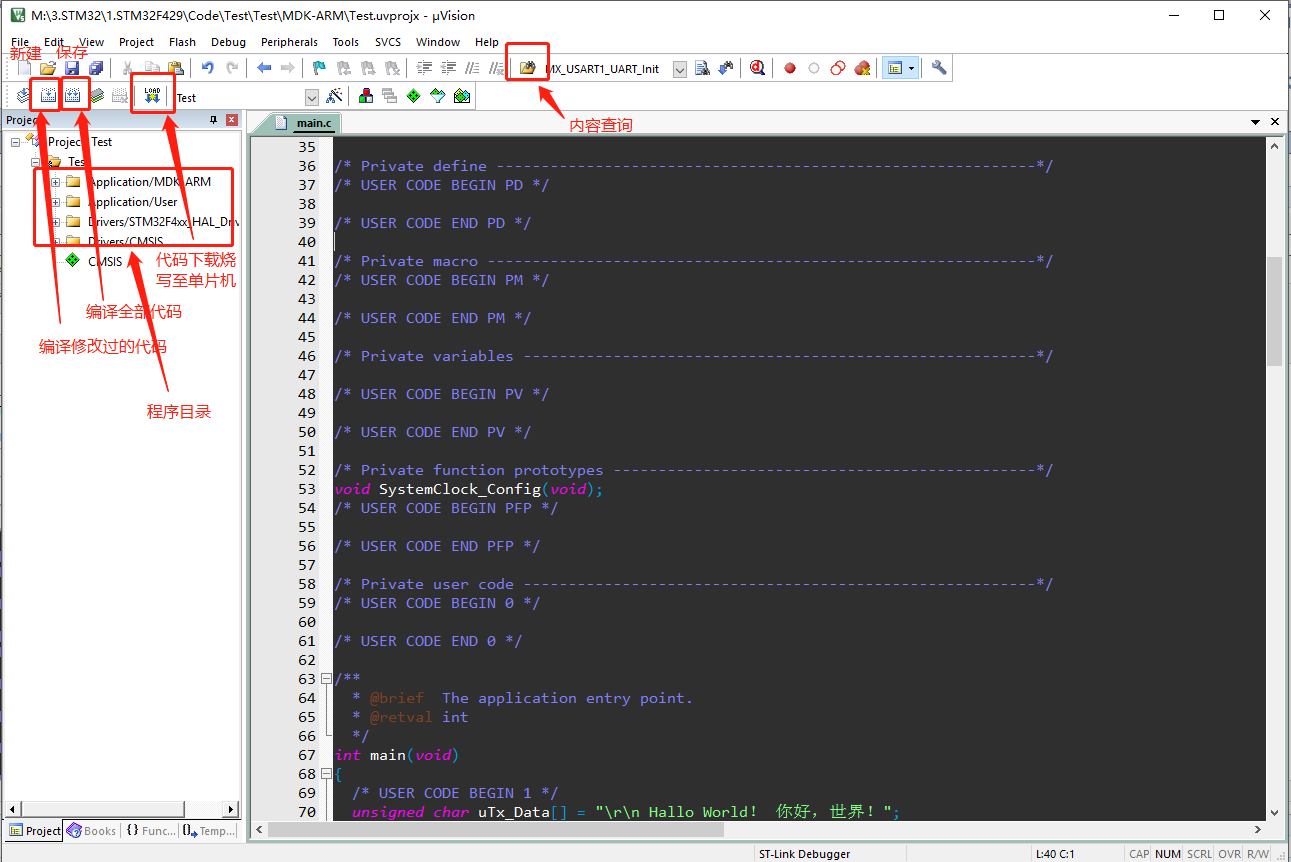
1)功能界面
2)选择小锤子
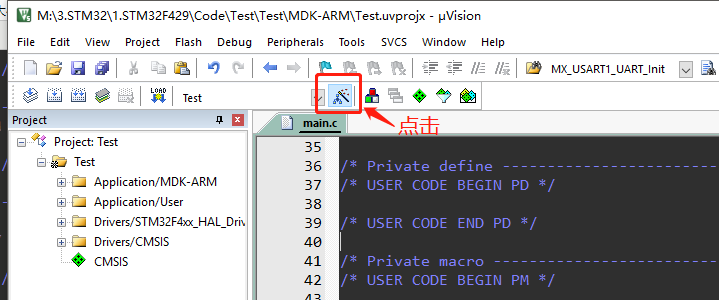
3)选择Debug->Settings
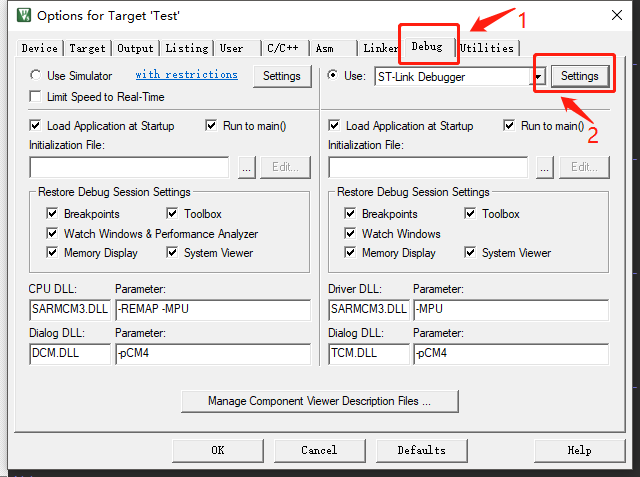
4)选择Flash Download->勾选Reset and Run
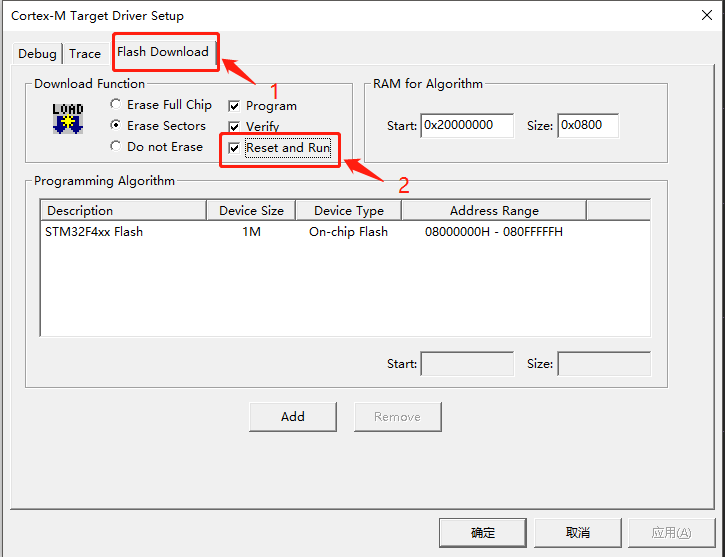
完成上面的操作后,在每次烧写都会重置,并运行新下载烧写的程序了。
四、HAL库关键函数说明
1、初始化/还原初始化函数
1 /* Initialization/de-initialization functions **********************************/ 2 HAL_StatusTypeDef HAL_UART_Init(UART_HandleTypeDef *huart); //根据UART_InitTypeDef中指定的参数初始化UART模式,并创建关联的句柄。 3 HAL_StatusTypeDef HAL_HalfDuplex_Init(UART_HandleTypeDef *huart); //根据UART_InitTypeDef中指定的参数初始化半双工模式并创建关联句柄。 4 HAL_StatusTypeDef HAL_LIN_Init(UART_HandleTypeDef *huart, uint32_t BreakDetectLength); //根据UART_InitTypeDef中指定的参数初始化LIN模式,并创建关联的句柄。 5 HAL_StatusTypeDef HAL_MultiProcessor_Init(UART_HandleTypeDef *huart, uint8_t Address, uint32_t WakeUpMethod); //根据UART_InitTypeDef中指定的参数初始化多处理器模式,并创建关联的句柄。 6 HAL_StatusTypeDef HAL_UART_DeInit(UART_HandleTypeDef *huart); //非初始化UART外围设备。 7 void HAL_UART_MspInit(UART_HandleTypeDef *huart); //弱函数UART MSP初始化 8 void HAL_UART_MspDeInit(UART_HandleTypeDef *huart); //弱函数UART MSP初始化还原
2、IO口操作函数
1 /* IO operation functions *******************************************************/ 2 HAL_StatusTypeDef HAL_UART_Transmit(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout);//以阻塞模式发送大量数据。 3 HAL_StatusTypeDef HAL_UART_Receive(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size, uint32_t Timeout); //在阻塞模式下接收大量数据。 4 HAL_StatusTypeDef HAL_UART_Transmit_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); //以非阻塞模式发送大量数据。 5 HAL_StatusTypeDef HAL_UART_Receive_IT(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); //在非阻塞模式下接收大量数据。 6 HAL_StatusTypeDef HAL_UART_Transmit_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); //以非阻塞模式发送大量数据。 7 HAL_StatusTypeDef HAL_UART_Receive_DMA(UART_HandleTypeDef *huart, uint8_t *pData, uint16_t Size); //在非阻塞模式下接收大量数据。 8 HAL_StatusTypeDef HAL_UART_DMAPause(UART_HandleTypeDef *huart); //暂停DMA传输。 9 HAL_StatusTypeDef HAL_UART_DMAResume(UART_HandleTypeDef *huart); //恢复DMA传输。 10 HAL_StatusTypeDef HAL_UART_DMAStop(UART_HandleTypeDef *huart); //停止DMA传输。
3、传输中断函数
1 /* Transfer Abort functions */ 2 HAL_StatusTypeDef HAL_UART_Abort(UART_HandleTypeDef *huart); //中止正在进行的传输(阻塞模式)。 3 HAL_StatusTypeDef HAL_UART_AbortTransmit(UART_HandleTypeDef *huart); //中止正在进行的传输传输(阻塞模式)。 4 HAL_StatusTypeDef HAL_UART_AbortReceive(UART_HandleTypeDef *huart); //中止正在进行的接收传输(阻塞模式)。 5 HAL_StatusTypeDef HAL_UART_Abort_IT(UART_HandleTypeDef *huart); //中止正在进行的传输(中断模式)。 6 HAL_StatusTypeDef HAL_UART_AbortTransmit_IT(UART_HandleTypeDef *huart); //中止正在进行的传输(中断模式)。 7 HAL_StatusTypeDef HAL_UART_AbortReceive_IT(UART_HandleTypeDef *huart); //中止正在进行的接收传输(中断模式)。
4、中断处理及回调函数
1 void HAL_UART_IRQHandler(UART_HandleTypeDef *huart); //函数处理UART中断请求。 2 void HAL_UART_TxCpltCallback(UART_HandleTypeDef *huart); //Tx传输完成回调函数。 3 void HAL_UART_TxHalfCpltCallback(UART_HandleTypeDef *huart); //Tx半传输完成回调函数。 4 void HAL_UART_RxCpltCallback(UART_HandleTypeDef *huart); //Rx传输完成回调函数。 5 void HAL_UART_RxHalfCpltCallback(UART_HandleTypeDef *huart); //Rx完成一半传输回调函数。 6 void HAL_UART_ErrorCallback(UART_HandleTypeDef *huart); //UART错误回调函数。 7 void HAL_UART_AbortCpltCallback(UART_HandleTypeDef *huart); //UART中止完成回调函数。 8 void HAL_UART_AbortTransmitCpltCallback(UART_HandleTypeDef *huart); //UART中止完成回调函数。 9 void HAL_UART_AbortReceiveCpltCallback(UART_HandleTypeDef *huart); //UART中止接收完整的回调函数。
五、结尾
1、总结
这篇博客主要是讲解一下UART串口通信协议的时序、功能以及工作原理,还有使用STM32CubeMX来配置USART。而还未讲到有关HAL库函数的函数调用,有了STM32CubeMX生成的这个HAL库函数,我们基本不用管协议上的事情了,可以直接调用里面的发送或接收函数来实现UART通信。而我也会在后续继续编写有关HAL库的调用说明,详细说一下HAL库是如何使用的。
2、后续
1)
UART发送
2)
UART接收
3)待续未完……
~
~
~
~
最后~
最后~
最后~
欢迎大家关注
我的博客
,一起分享嵌入式知识~
转载于:https://www.cnblogs.com/ChurF-Lin/p/10793111.html