本文的仿真场景资源下载地址:
https://download.csdn.net/download/sinat_39153249/12505915
在Vrep中,机器人可以跟随设定的path运动。要使机器人跟随path运动,首先要建立逆运动学。
1.首先将机器人拖入场景中。如图
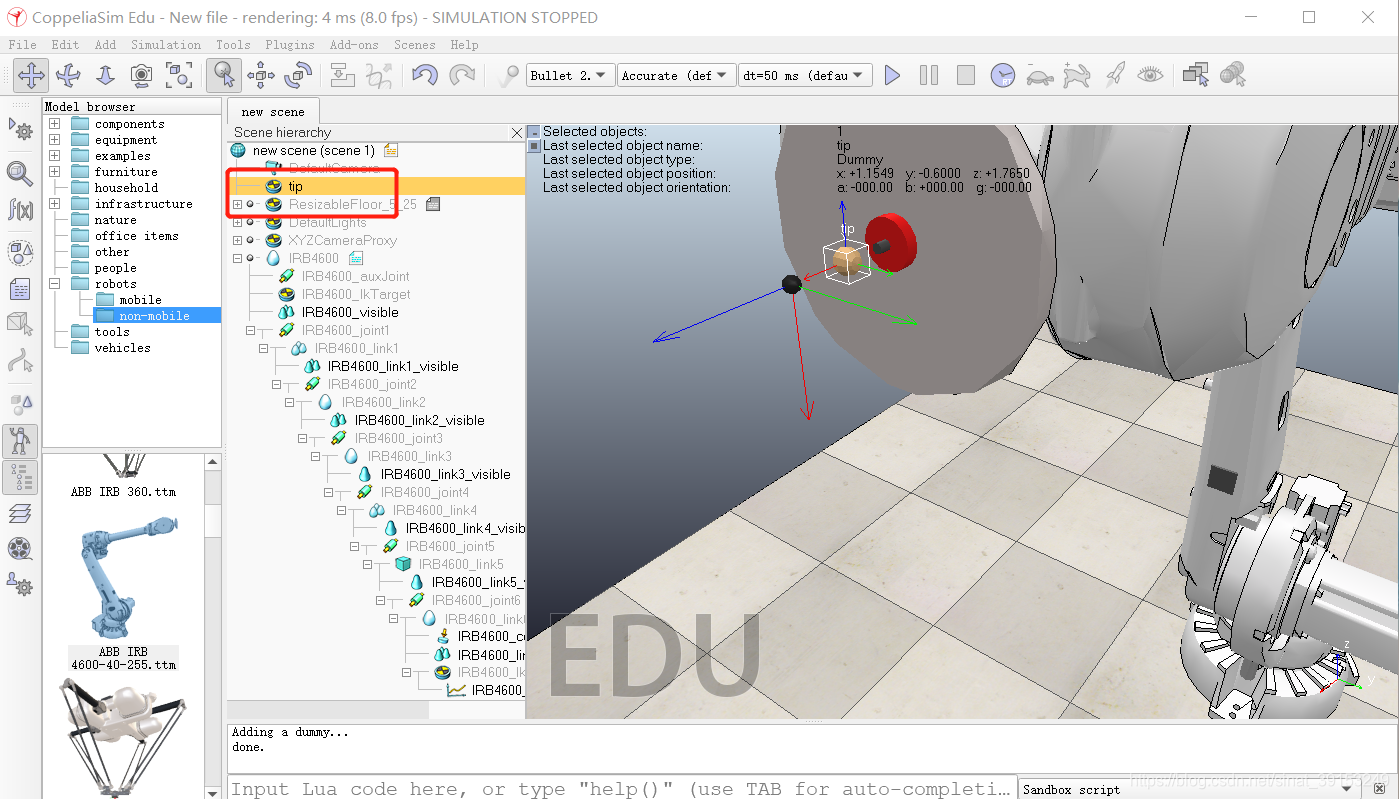
2.加入Dummy
3.将Dummy移动到机械臂末端位置,如图。
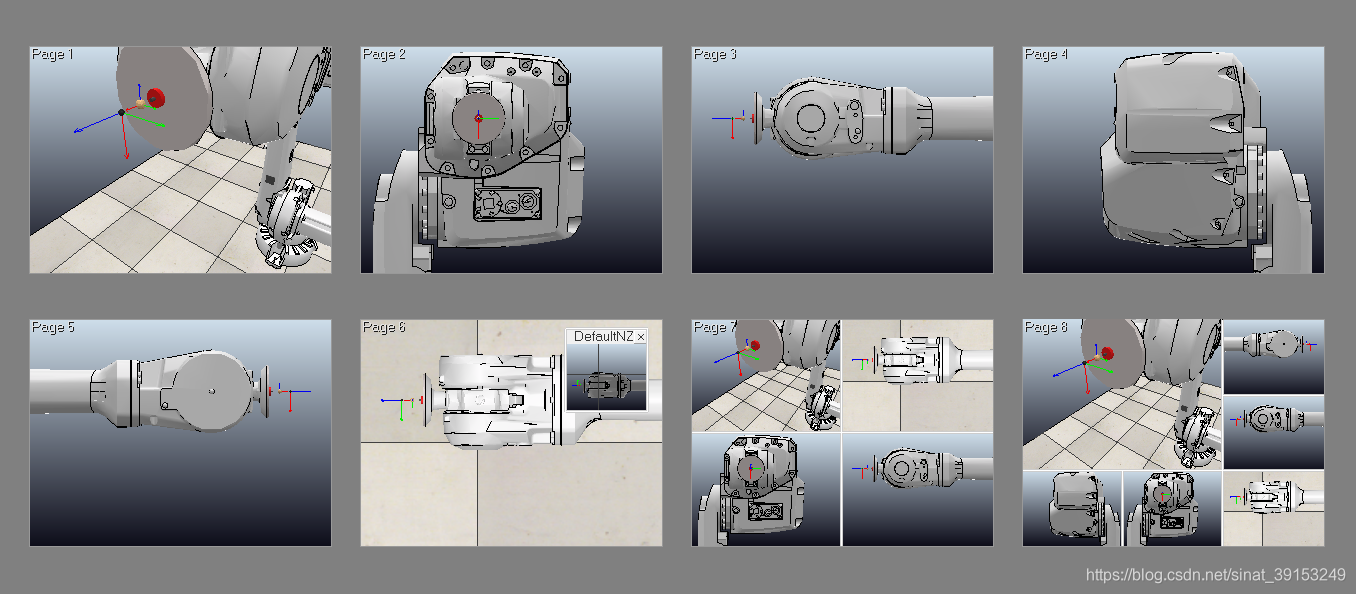
4.将Dummy改名为tip。
5.再复制一个Dummy。
6.将复制的Dummy改名为target。
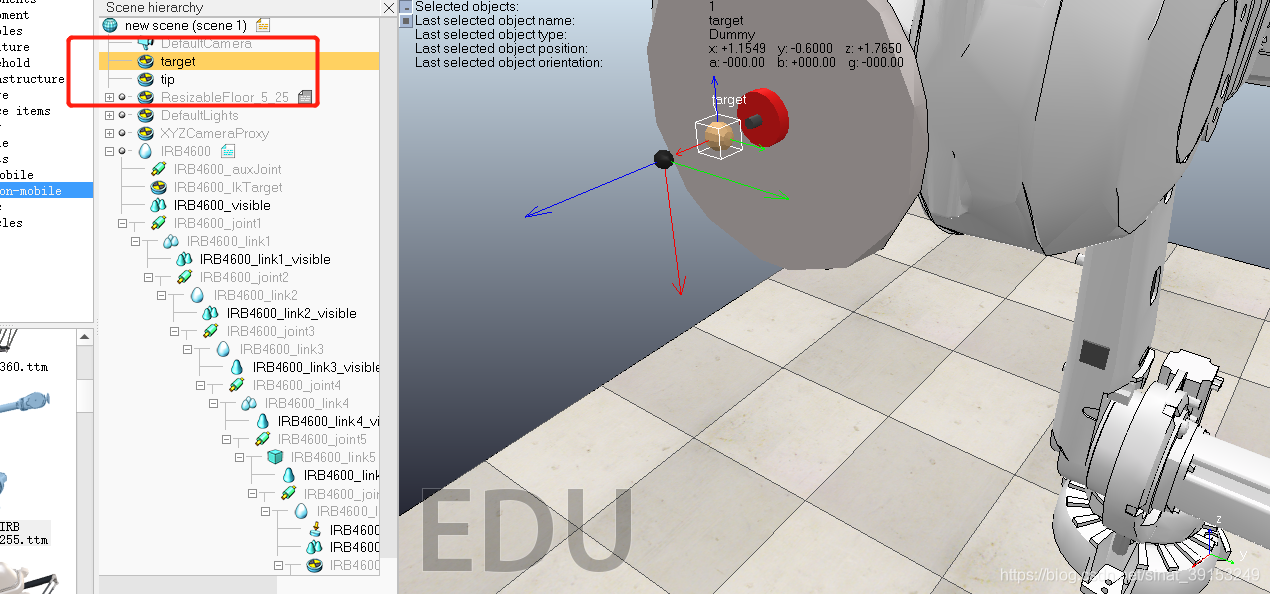
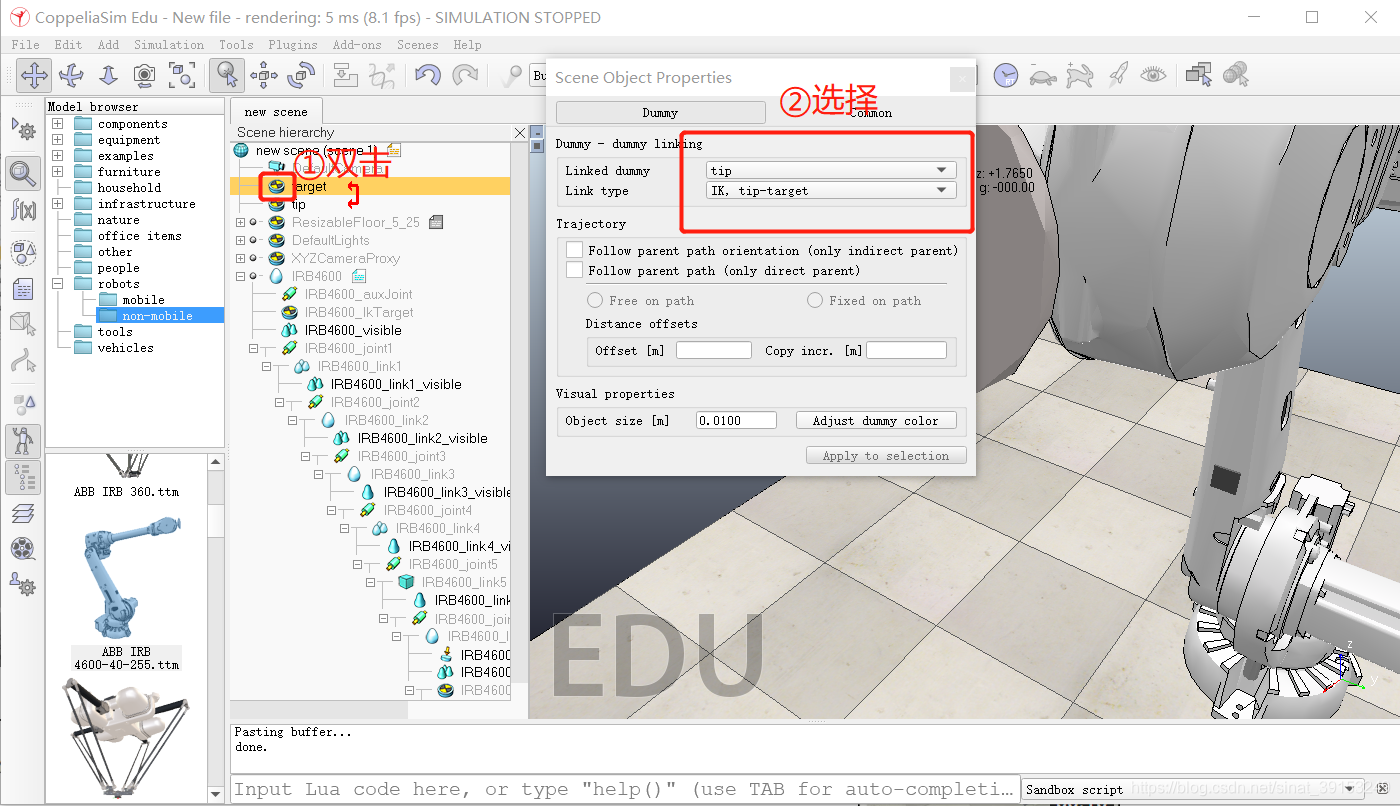
7.连结两个Dummy。
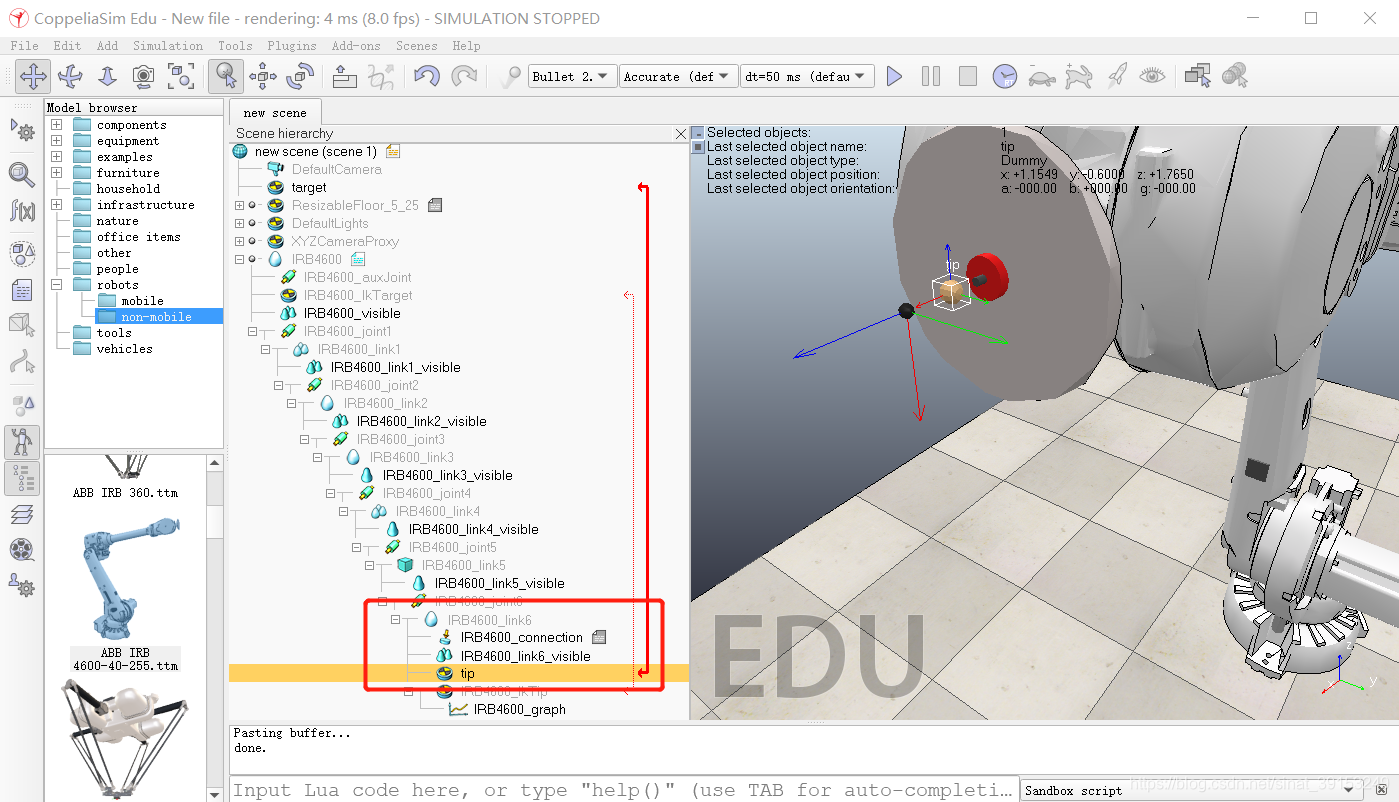
8.将tip拖到机械臂末端的关系中。
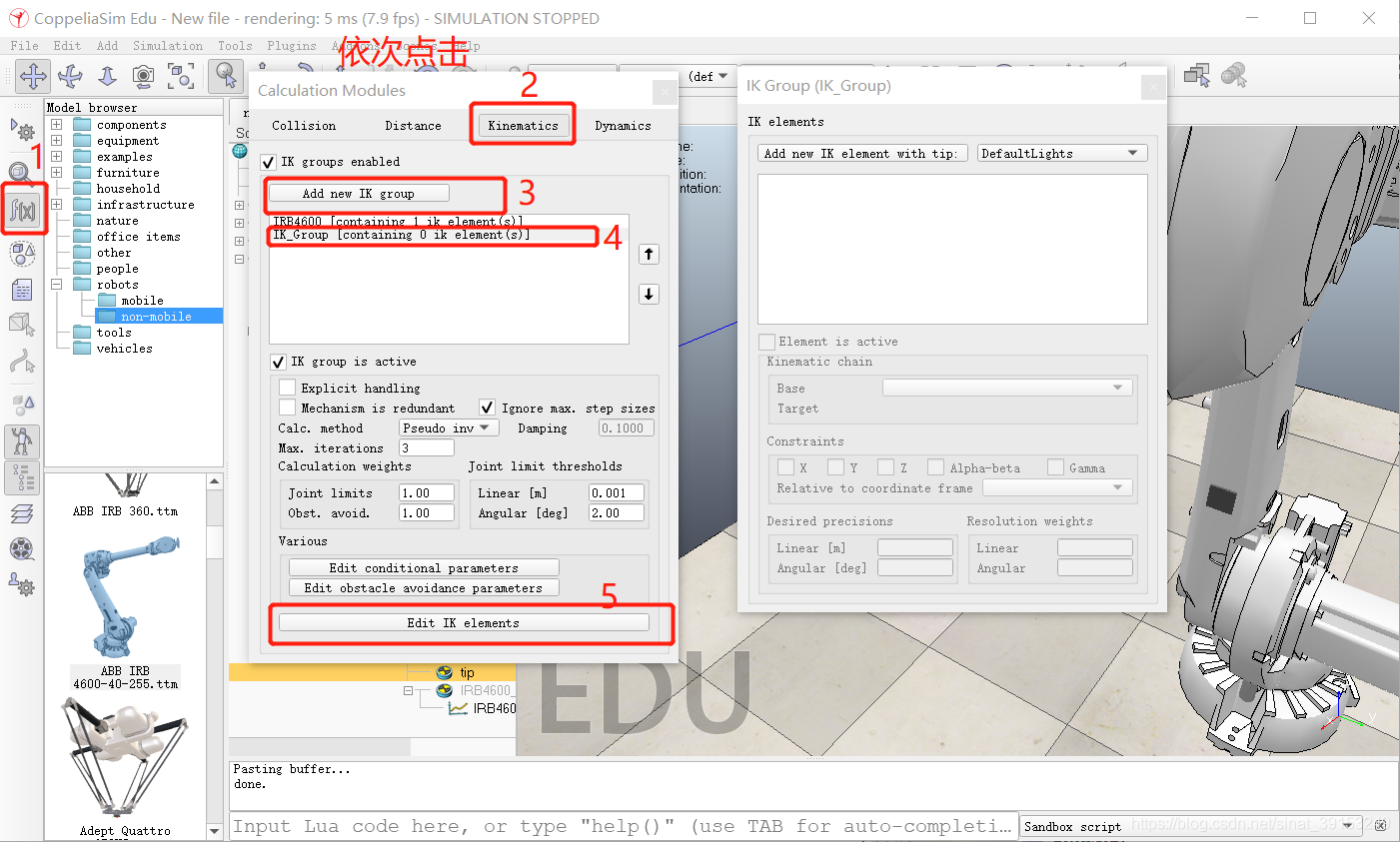
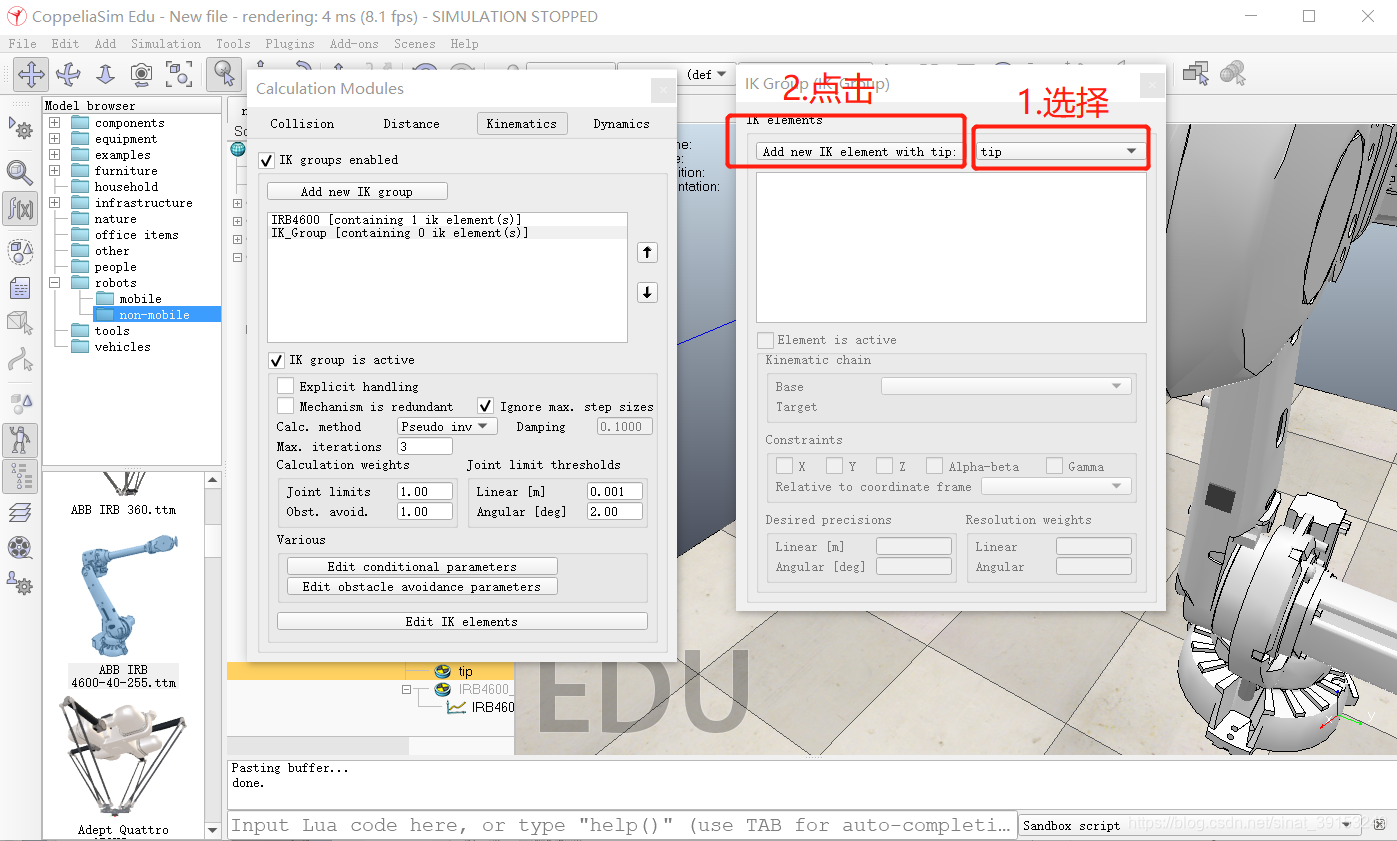
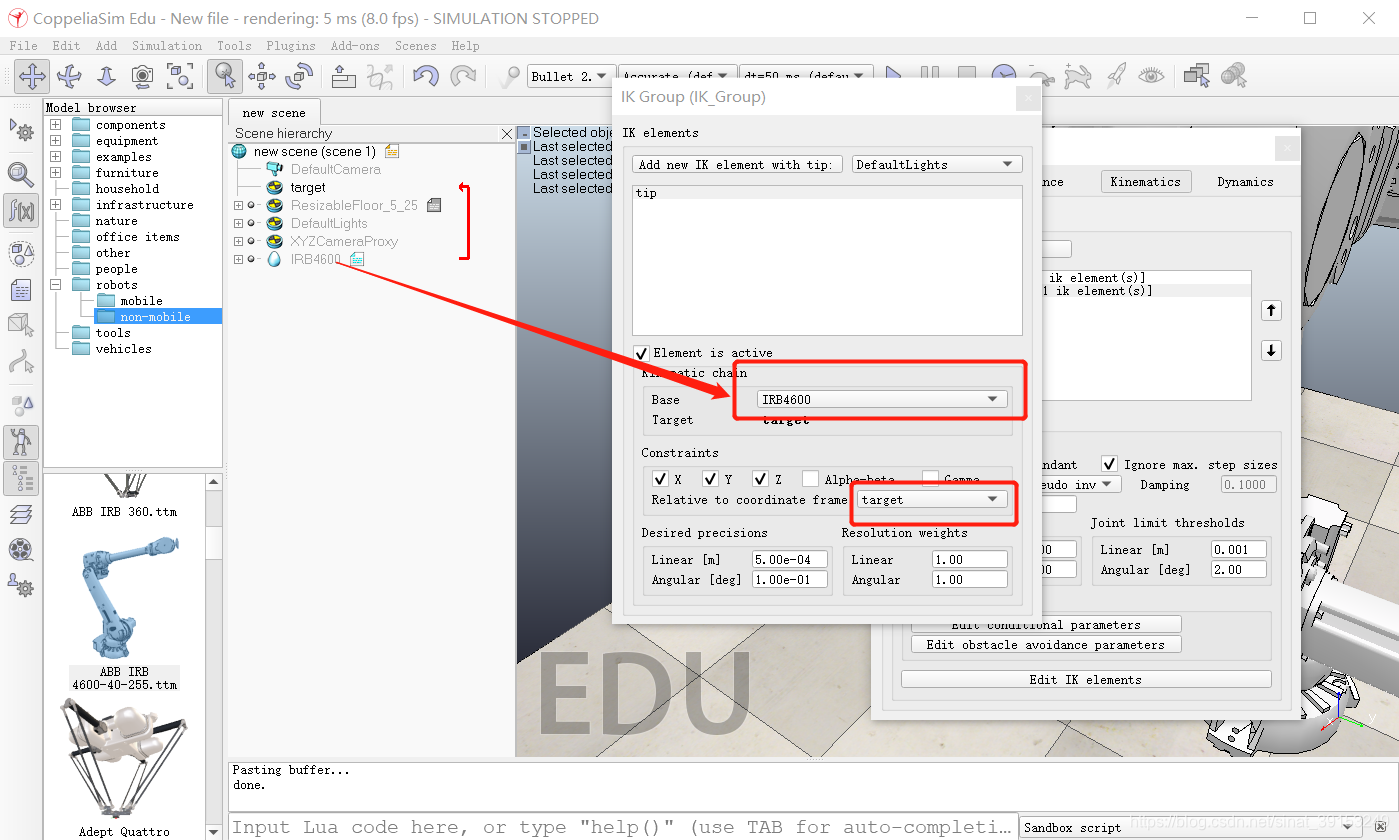
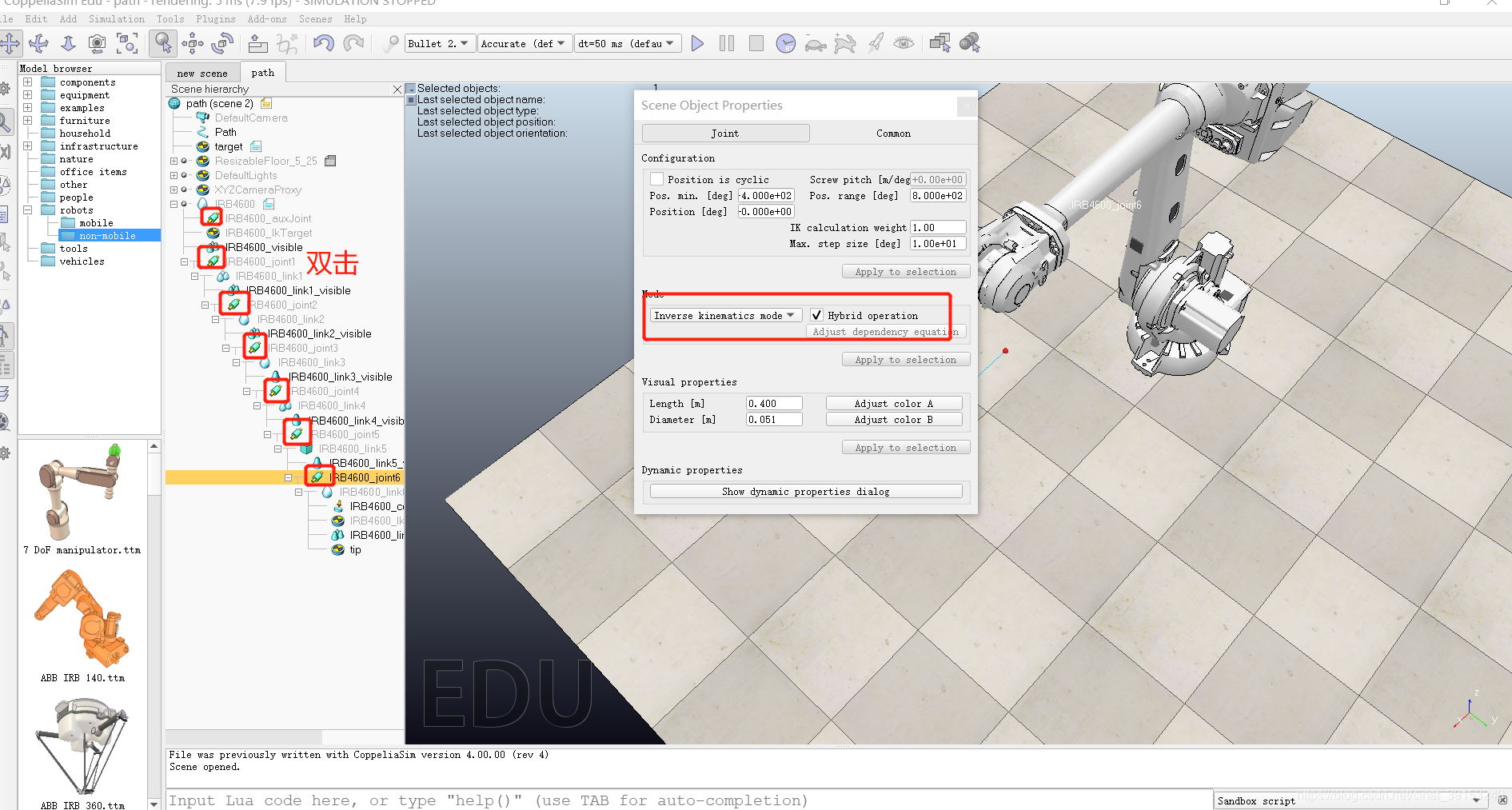
9.设置逆运动学
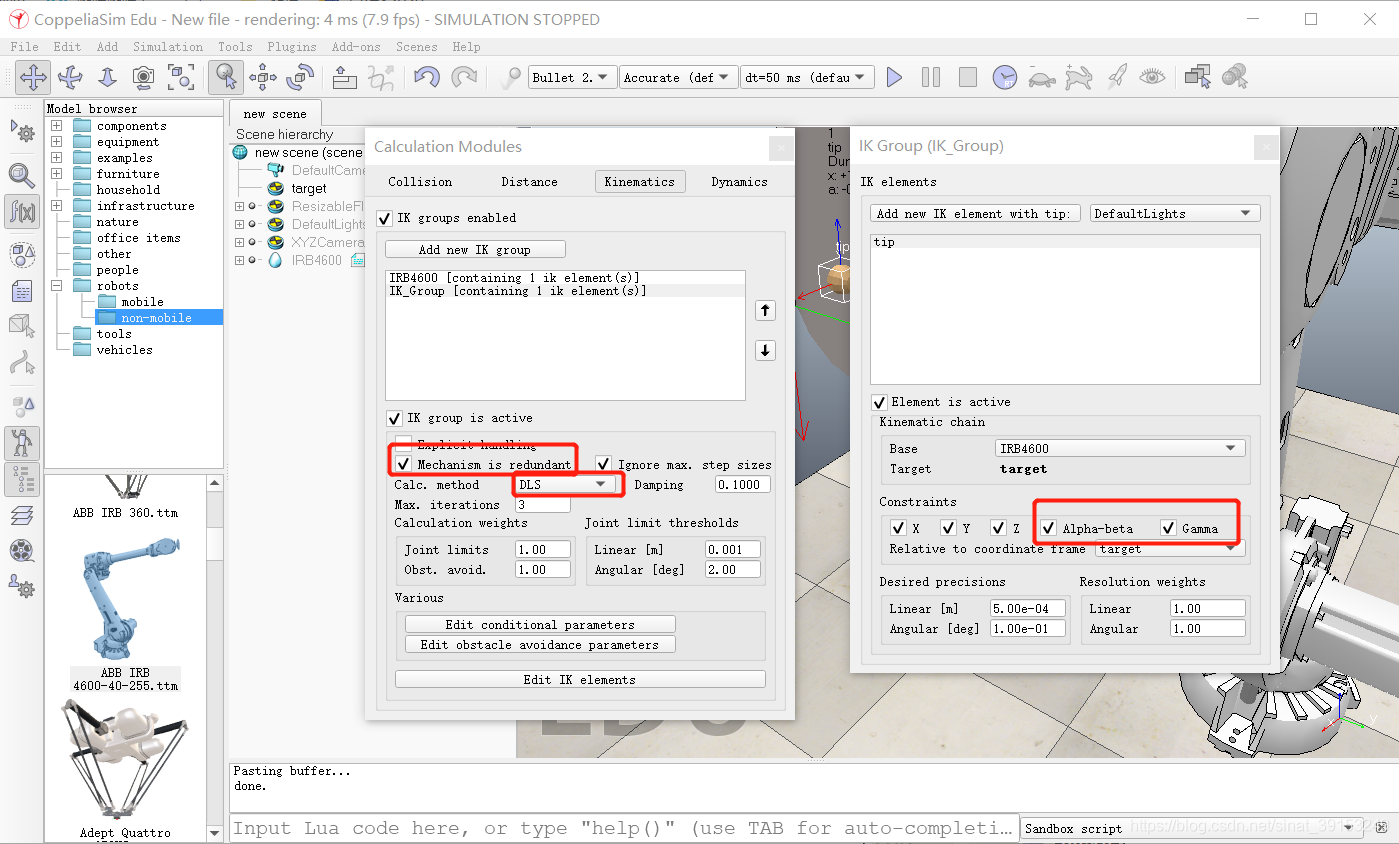
DLS速度较慢,但是在奇异位置处更稳定
10.将每个关节设置改为下图所示:
11.可以在仿真中拖动target检验逆运动学。
版权声明:本文为sinat_39153249原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。