adc简介



SOC
TMS320F28027的ADC为3型,是基于SOC的而不是基于序列的。SOC是一种配置设置,它定义的是单通道单转换。包含3个配置:启动转换的触发源、转换通道、采样保持窗口。每个SOC都是单独配置,即触发源、通道、采样保持窗口可任意组合,可实现从“使用不同触发器、不同通道的单独采样”到“使用单个触发器、相同通道的过采样”。

- ADCSOCxCTL: SOCx控制寄存器 (x =0~15)
- ADCSOCFLG: SOC标志寄存器
触发源 4个

通道 A/B 8个

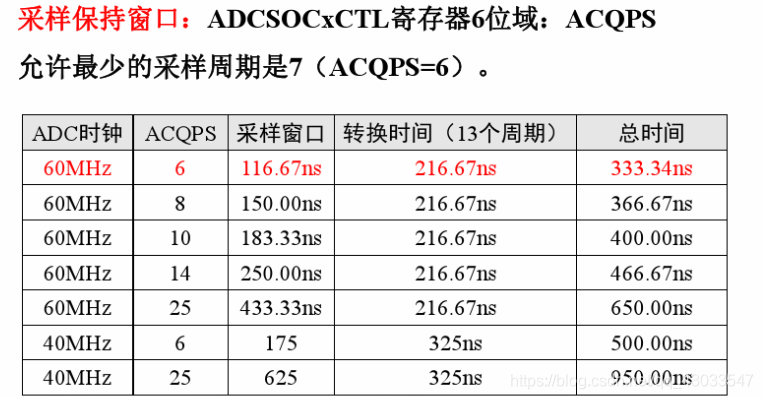
采样保持窗口:
**外部驱动能力的不同影响推动模拟信号速度和有效性。有一些电路需要更长的时间,使电荷正确地转移到ADC的采样电容。为了满足需求,ADC可以在SOC中独立地控制采样窗口的宽度。每个ADCSOCxCTL寄存器都有6位域,ACQPS,用来决定采样保持窗口的大小。写到这个位域的值要比期望的采样保持窗口的包括的周期要少1。例如:位域的值为15,那就需要16个周期来采样。允许最少的采样周期是7(ACQPS=6)。完成一次转换的时间由采样时间加转换时间(13个ADC时钟)组成**
受EALLOW保护



adc的连接


例如,要确保通道ADCINA1上的单个转换在ePWM3计时器达到其周期匹配时发生,必须首先设置ePWM3,以便在周期匹配上输出SOCA或SOCB信号。参见TMS320x2802x Piccolo增强脉冲宽度调制器模块用户指南(SPRUGE9),了解如何做到这一点。在本例中,我们将使用SOCA。然后,使用它的ADCSOCxCTL寄存器设置SOC中的一个。我们选择哪个soc无关紧要,所以我们将使用SOCO。ADC最快的采样窗口为7个循环。为示例窗口选择最快的时间,通道ADCINA1用于通道转换,ePWM3用于SOCO触发器,我们将设置ACQPS字段到6,CHSEL字段到1和TRIGSEL字段到9。写入寄存器的结果值为:
当这样配置时,将在ePWM3 SOCA事件上启动一次ADCINA1的转换,其结果值存储在ADCRESULTO寄存器中。如果ADCINA1需要3倍的过采样。可以给soc1 soc2 SoC3赋予与SOco相同的构型
外部驱动程序能够快速有效地驱动模拟信号。有些电路需要更长的时间才能正确地将电荷转移到ADC的采样电容中。为了解决这个问题,ADC支持控制样本窗口长度为每个单独的SOC实现方式。每个ADCSOCxCTL reaister都有一个6位字段ACQPS。这决定了采样和保持(S/H)窗口大小写入该字段的值比该SOC的采样窗口所需的周期数少一个。因此,该字段中的值15将给出16个时钟周期的采样时间。允许的最小采样周期数为7 (ACQPS-6)。总采样时间是通过将采样窗口大小添加到ADC的转换时间中得到的。13 ADC的时钟。



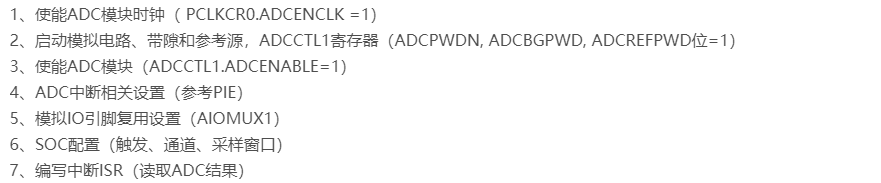
ADC编程步骤
初始化程序 123固定
void InitAdc(void)
{
extern void DSP28x_usDelay(Uint32 Count);
// *IMPORTANT*
// The Device_cal function, which copies the ADC calibration values from TI reserved
// OTP into the ADCREFSEL and ADCOFFTRIM registers, occurs automatically in the
// Boot ROM. If the boot ROM code is bypassed during the debug process, the
// following function MUST be called for the ADC to function according
// to specification. The clocks to the ADC MUST be enabled before calling this
// function.
// See the device data manual and/or the ADC Reference
// Manual for more information.
EALLOW;
SysCtrlRegs.PCLKCR0.bit.ADCENCLK = 1;//使能ADC模块时钟
(*Device_cal)();
EDIS;
// To powerup the ADC the ADCENCLK bit should be set first to enable
// clocks, followed by powering up the bandgap, reference circuitry, and ADC core.
// Before the first conversion is performed a 5ms delay must be observed
// after power up to give all analog circuits time to power up and settle
// Please note that for the delay function below to operate correctly the
// CPU_RATE define statement in the DSP2802x_Examples.h file must
// contain the correct CPU clock period in nanoseconds.
EALLOW;
AdcRegs.ADCCTL1.bit.ADCBGPWD = 1; // Power ADC BG 带隙
AdcRegs.ADCCTL1.bit.ADCREFPWD = 1; // Power reference 参考源
AdcRegs.ADCCTL1.bit.ADCPWDN = 1; // Power ADC 启动模拟电路
AdcRegs.ADCCTL1.bit.ADCENABLE = 1; // Enable ADC 使能ADC
AdcRegs.ADCCTL1.bit.ADCREFSEL = 0; // Select interal BG 选择内部带隙
EDIS;
DELAY_US(ADC_usDELAY); // Delay before converting ADC channels
}
初始化函数已经把我们的前三步都做完了,也就是使能时钟、上电、使能ADC模块;
那我们现在来进行SOC相关设置,也就是:触发源、采样时隙、通道选择。
*触发源*我们选择定时器0,因为我们做测试肯定输入一个稳定的直流电压,那用定时器最方便。
AdcRegs.ADCSOC0CTL.bit.TRIGSEL = 1;
采样时隙就用最短时隙,也就是AdcRegs.ADCSOC0CTL.bit.ACQPS = 6;
由于TI那个实验板只引出了几个ADC引脚而已,我们就用ADCINA1,也就是 AdcRegs.ADCSOC0CTL.bit.CHSEL = 1;
另外,我们说了,我们本次的实验是顺序采样,迟中断,那就是:
AdcRegs.ADCSAMPLEMODE.bit.SIMULEN0 = 1;
AdcRegs.ADCCTL1.bit.INTPULSEPOS = 1;
到这里SOC相关设置就完成了
AdcRegs.ADCSOC0CTL.bit.CHSEL = 1; //set SOC0 channel select to ADCINA0 选择AD通道 1
AdcRegs.ADCSOC0CTL.bit.TRIGSEL = 1; //set SOC0 start trigger on timer 0 only 选择AD触发方式
AdcRegs.ADCSOC0CTL.bit.ACQPS = 6; //set SOC0 S/H Window to 7 ADC Clock Cycles, (6 ACQPS plus 1) 配置转换时间
AdcRegs.ADCSAMPLEMODE.bit.SIMULEN0 = 1; //顺序采样
AdcRegs.ADCCTL1.bit.INTPULSEPOS = 1;
EDIS;


最后还要再PIE组里面打开ADCINT1开关:PieCtrlRegs.PIEIER1.bit.INTx1 = 1;
ADC中断函数就一个置位:
interrupt void ADCINT1_ISR(void) // ADC (Can also be ISR for INT10.1 when enabled)
{
// Insert ISR Code here
// To receive more interrupts from this PIE group, acknowledge this interrupt
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
// Next two lines for debug only to halt the processor here
// Remove after inserting ISR Code
//asm (" ESTOP0");
//for(;;);
}
定时器
void InitCpuTimers(void)
{
// CPU Timer 0
// Initialize address pointers to respective timer registers:
CpuTimer0.RegsAddr = &CpuTimer0Regs;
// Initialize timer period to maximum:
CpuTimer0Regs.PRD.all = 1000;
// Initialize pre-scale counter to divide by 1 (SYSCLKOUT):
CpuTimer0Regs.TPR.bit.TDDR = 59;
CpuTimer0Regs.TPRH.bit.TDDRH = 0;
// Make sure timer is stopped:
CpuTimer0Regs.TCR.bit.TSS = 1;
// Reload all counter register with period value:
CpuTimer0Regs.TCR.bit.TRB = 1;
// Reset interrupt counters:
CpuTimer0.InterruptCount = 0;
// CpuTimer 1 and CpuTimer2 are reserved for DSP BIOS & other RTOS
// Do not use these two timers if you ever plan on integrating
// DSP-BIOS or another realtime OS.
//
// Initialize address pointers to respective timer registers:
CpuTimer1.RegsAddr = &CpuTimer1Regs;
CpuTimer2.RegsAddr = &CpuTimer2Regs;
// Initialize timer period to maximum:
CpuTimer1Regs.PRD.all = 0xFFFFFFFF;
CpuTimer2Regs.PRD.all = 0xFFFFFFFF;
// Initialize pre-scale counter to divide by 1 (SYSCLKOUT):
CpuTimer1Regs.TPR.all = 0;
CpuTimer1Regs.TPRH.all = 0;
CpuTimer2Regs.TPR.all = 0;
CpuTimer2Regs.TPRH.all = 0;
// Make sure timers are stopped:
CpuTimer1Regs.TCR.bit.TSS = 1;
CpuTimer2Regs.TCR.bit.TSS = 1;
// Reload all counter register with period value:
CpuTimer1Regs.TCR.bit.TRB = 1;
CpuTimer2Regs.TCR.bit.TRB = 1;
// Reset interrupt counters:
CpuTimer1.InterruptCount = 0;
CpuTimer2.InterruptCount = 0;
}
定时器中断
interrupt void TINT0_ISR(void) // CPU-Timer 0
{
// Insert ISR Code here
// To receive more interrupts from this PIE group, acknowledge this interrupt
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
// Next two lines for debug only to halt the processor here
// Remove after inserting ISR Code
// asm (" ESTOP0");
// for(;;);
}
相关中断设置
CpuTimer0Regs.TCR.bit.TIE = 1;
StartCpuTimer0();
EALLOW;
PieCtrlRegs.PIEIER1.bit.INTx7 = 1;
PieCtrlRegs.PIECTRL.bit.ENPIE = 1;
IER |= 0x0001;
EINT;
EDIS;
显示
while(1)
{
if(AdcRegs.ADCSOCFLG1.bit.SOC0==1)
{
while(AdcRegs.ADCSOCFLG1.bit.SOC0==1);
AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
DELAY_US(10);
sum+=AdcResult.ADCRESULT0;
i++;
}
if(i==100)
{
sum/=100;
vol=sum*3.3/4095;
WRITECMD_LCD12864(0x01);
DISLPLAY_LONGSTRING(2,0,sum);
DISLPLAY_FLOATSTRING(3,0,vol);
WRITEDATA_LCD12864('v');
sum=0;
i=0;
}
}
主要参考:
https://blog.csdn.net/BHK_SOFTWARE/article/details/52137577
寄存器讲解
https://wenku.baidu.com/view/e14aaf55d15abe23492f4d52.html?pn=51
程序代码
https://blog.csdn.net/w471176877/article/details/8049697
http://bbs.eeworld.com.cn/thread-475877-1-1.html
主频:60M
描述:练习ADC,同时采样模式,ADCINA4与ADCINB4
CPU TIM0为触发,同时采样两路电压
#include "DSP28x_Project.h" // Device Headerfile and Examples Include File
#include "LEDs.h"
interrupt void tim0_isr(void);
interrupt void ADC_convered(void);
Uint16 ADCINA4_Voltage_sum = 0;
Uint16 ADCINB4_Voltage_sum = 0;
Uint16 ADCINA4_Voltage = 0;
Uint16 ADCINB4_Voltage = 0;
char convered_count = 0;
void main(void)
{
// Step 1. Initialize System Control:
// PLL, WatchDog, enable Peripheral Clocks
// This example function is found in the DSP2802x_SysCtrl.c file.
InitSysCtrl();
// Step 2. Initalize GPIO:
// This example function is found in the DSP2802x_Gpio.c file and
// illustrates how to set the GPIO to it's default state.
// InitGpio(); // Skipped for this example
// Step 3. Clear all interrupts and initialize PIE vector table:
// Disable CPU interrupts
DINT;
// Initialize PIE control registers to their default state.
// The default state is all PIE interrupts disabled and flags
// are cleared.
// This function is found in the DSP2802x_PieCtrl.c file.
InitPieCtrl();
// Disable CPU interrupts and clear all CPU interrupt flags:
IER = 0x0000;
IFR = 0x0000;
// Initialize the PIE vector table with pointers to the shell Interrupt
// Service Routines (ISR).
// This will populate the entire table, even if the interrupt
// is not used in this example. This is useful for debug purposes.
// The shell ISR routines are found in DSP2802x_DefaultIsr.c.
// This function is found in DSP2802x_PieVect.c.
InitPieVectTable();
// Step 4. Initialize all the Device Peripherals:
// This function is found in DSP2802x_InitPeripherals.c
// InitPeripherals(); // Not required for this example
// Step 5. User specific code:
InitAdc();
EALLOW;
AdcRegs.ADCSAMPLEMODE.bit.SIMULEN0 = 1; //同时采样
AdcRegs.ADCSOC0CTL.bit.CHSEL = 4; //soc通道选择
AdcRegs.ADCSOC1CTL.bit.CHSEL = 12;
AdcRegs.ADCSOC0CTL.bit.ACQPS = 6; //采样时间
AdcRegs.ADCSOC1CTL.bit.ACQPS = 6;
AdcRegs.ADCSOC0CTL.bit.TRIGSEL = 1; //soc触发选择,TIM0
AdcRegs.ADCCTL1.bit.INTPULSEPOS = 1; //结果存入寄存器才产生中断
PieVectTable.ADCINT1 = &ADC_convered;
AdcRegs.INTSEL1N2.bit.INT1SEL = 1; //中断线1选择soc1
AdcRegs.INTSEL1N2.bit.INT1CONT = 0;
AdcRegs.INTSEL1N2.bit.INT1E = 1; //中断使能
PieCtrlRegs.PIEIER1.bit.INTx1 = 1; //使能int1.1
EDIS;
/****************设置定时器,用以触发ADC*****************/
CpuTimer0Regs.TPR.bit.TDDR = 59;
CpuTimer0Regs.TPRH.bit.TDDRH = 0; //对输入时钟60分频,60M/60=1M
CpuTimer0Regs.PRD.all = 500000;//定时0.5s
CpuTimer0Regs.TCR.bit.TRB = 1; //reload
CpuTimer0Regs.TCR.bit.TIE = 1; //使能中断
CpuTimer0Regs.TCR.bit.TSS = 0; //开始计数
EALLOW;
PieVectTable.TINT0 = &tim0_isr;
PieCtrlRegs.PIECTRL.bit.ENPIE = 1; //使能PIE
PieCtrlRegs.PIEIER1.bit.INTx7 = 1; //使能int1.7
IER |= 0x0001;//使能GROUP1
EINT;
EDIS;
LEDs_init();
while(1)
{
};
}
interrupt void ADC_convered(void)
{
LED_toggle(LED2);
ADCINA4_Voltage_sum += AdcResult.ADCRESULT0;
ADCINB4_Voltage_sum += AdcResult.ADCRESULT1;
AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1;
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
convered_count++;
/*********转换16次,取平均值*********/
if(convered_count > 15)
{
ADCINA4_Voltage = ADCINA4_Voltage_sum >> 4;//相当于除以16
ADCINB4_Voltage = ADCINB4_Voltage_sum >> 4;
ADCINA4_Voltage_sum = 0;
ADCINB4_Voltage_sum = 0;
convered_count = 0;
}
}
interrupt void tim0_isr(void)
{
LED_toggle(LED0);
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1;
}
---------------------
作者:w471176877
来源:CSDN
原文:https://blog.csdn.net/w471176877/article/details/8049697
版权声明:本文为博主原创文章,转载请附上博文链接!
配置ADC单通道软件强制转换 ,配合程序来解释ADC配置的思路。
step 1:
InitSysCtrl(); // 系统初始化子程序,在DSP28_sysctrl.c中,PLL,关闭看门狗,使能外围模块
step 2:
InitPieCtrl(); //初始化PIE控制寄存器,恢复默认设置
IER = 0x0000;//CPU禁止使能
IFR = 0x0000;//清楚CPU所有中断标志
InitPieVectTable();//初始化PIE向量表
step 3:
//初始化ADC
EALLOW; //使能ADC模块的时钟
SysCtrlRegs.PCLKCR0.bit.ADCENCLK = 1;
(*Device_cal)();
EDIS;
step 4:
EALLOW; //这部分官方手册建议就按这个顺序配置
AdcRegs.ADCCTL1.bit.ADCBGPWD = 1; // Power ADC BG
AdcRegs.ADCCTL1.bit.ADCREFPWD = 1; // Power reference
AdcRegs.ADCCTL1.bit.ADCPWDN = 1; // Power ADC
AdcRegs.ADCCTL1.bit.ADCENABLE = 1; // Enable ADC
AdcRegs.ADCCTL1.bit.ADCREFSEL = 0; // Select interal BG
EDIS;
DELAY_US(ADC_usDELAY); // Delay before converting ADC channels step 5:
EALLOW; AdcRegs.INTSEL1N2.bit.INT1E = 1; //使能 ADCINT1
//ADCSOCxCTL x可设置0--15,CHSEL 选择AD输入通道
AdcRegs.ADCSOC0CTL.bit.CHSEL = 0; //set SOC0 channel select to ADCINA0 选择AD通道
AdcRegs.ADCSOC0CTL.bit.TRIGSEL = 0; //set SOC0 start trigger on software only 选择AD触发方式
AdcRegs.ADCSOC0CTL.bit.ACQPS = 6; //set SOC0 S/H Window to 7 ADC Clock Cycles, (6 ACQPS plus 1) 配置转换时间
EDIS;
step 6:
// Enable ADCINT1 in PIE
PieCtrlRegs.PIEIER1.bit.INTx1 = 1; // Enable INT 1.1 in the PIE
IER |= M_INT1; // Enable CPU Interrupt 1
EINT; // Enable Global interrupt INTM
ERTM; // Enable Global realtime interrupt DBGM
for(;;)
{
//Force start of conversion on SOC0
AdcRegs.ADCSOCFRC1.all = 0x01;
DELAY_US(1000000);//delay 1s 在死循环里面这样写就可以每1S就会强制ADC转换一次
}
//以下是中断服务函数
interrupt void adc_isr(void)
{
Voltage = AdcResult.ADCRESULT0; //读取AdcResult的值要与自己相对应配置的SOCx相对应,这个程序配置的是SOC0,所以要读取ADCRESULT0。
vol=Voltage*3.3/4096;
AdcRegs.ADCINTFLGCLR.bit.ADCINT1 = 1; //Clear ADCINT1 flag reinitialize for next SOC
PieCtrlRegs.PIEACK.all = PIEACK_GROUP1; // Acknowledge interrupt to PIE
return;
}