前提:安装了ROS系统
1.首先下载激光雷达的驱动链接:
https://github.com/LS-Technical-Supporter/LS-LIDAR-C32ROS
需要注意的是:驱动用ros1进行开发,支持ubuntu14.04,ubuntu16.04,ubuntu18.04下运行
2.创建工作空间命令:
mkdir -p ~/leishen_ws/src
然后将下载的驱动文件复制到src目录下
3.编译打包命令:
cd ~/leishen_ws
catkin_make
我遇到的问题:No such file or directory
#include <pcap.h>
解决办法:
方法一 sudo apt-get install libpcap-dev
方法二到
http://www.tcpdump.org
网站下载 libpcap,例如下载的是libpcap1.9.1.gz
在命令行中输入 sudo apt-get install flex
在命令行中输入 sudo apt-get install bison
在文件下载的目录下,命令行中输入 tar -zxv -f 下载的.gz文件,进行解压
依次输入 ./configure ; make ; sudo make install 这三个命令,完成
4.编译完成运行程序
source ~/leishen_ws/devel/setup.bash
roslaunchlslidar_c32_decoder lslidar_c32.launch
遇到的问题及解决措施:其中版本要对应
eq :sudoapt-get install ros-
melodic
-map-server

5.网络连接
先把网络连接改成手动连接,并且ip地址设置为192.168.1.102 子网掩码255.255.255.0,如图

检查网络连接:ping 192.168.1.102
看雷达ip地址和数据包端口和设备包端口:sudo tcpdump-n -i <网卡>名称
网卡名称查询 ifconfig -a
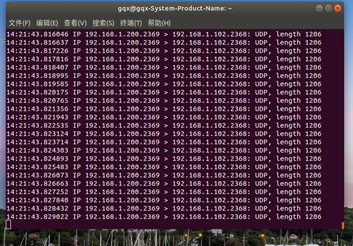
从左至右分别为雷达ip地址设备包对应端口电脑ip地址数据包对应端口
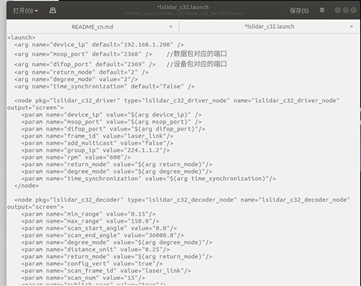
修改launch文件
6.打开一个新终端,输入rosrun rviz rviz
在弹出的 Displays 窗口中,将“FixedFrame”的值修改成 laser_link 即可,同时点击 add 按钮,
在 By topic 下点击 PointCloud2 添加多线点云节点。
即可获得最终的显示结果