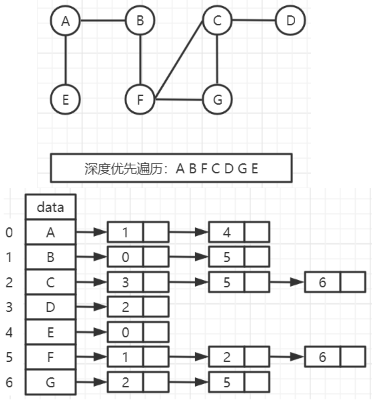
深度优先搜索
- 与广度优先搜索不同,深度优先搜索(Depth-First-Search,DFS)类似于树的先序遍历。如其名称中所暗含的意思一样,这种搜索算法所遵循的搜索策略是尽可能“深”地搜索一个图。
-
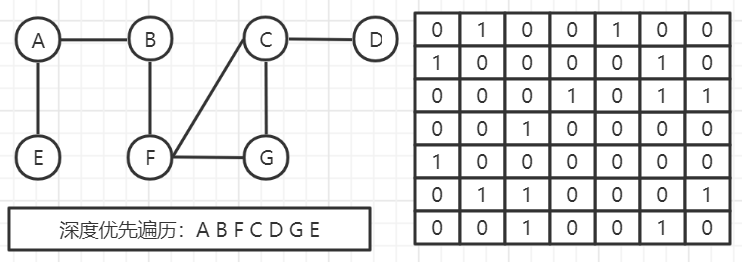
它的基本思想如下:首先访问图中某一起始顶点v,然后由v出发,访问与v邻接且未被访问的任一顶点
w1
w_1
w
1
,再访问与
w1
w_1
w
1
邻接且未被访问的任一顶点
w2
w_2
w
2
…重复上述过程。当不能再继续向下访问时,依次退回到最近被访问的顶点,若它还有邻接顶点未被访问过,则从该点开始继续上述搜索过程,直至图中所有顶点均被访问过为止。
代码实现(邻接矩阵法)
#include<stdio.h>
#include<malloc.h>
#define MaxVertenNum 100 //顶点数目的最大值
#define NodeNum 7 //顶点个数
typedef char VertexType; //顶点的数据类型
typedef int EdgeType; //存放顶点信息
typedef struct
{
VertexType Vex[MaxVertenNum]; //顶点表
EdgeType Edge[MaxVertenNum][MaxVertenNum]; //邻接矩阵
int vexnum, edgenum; //图的当前顶点数和边数
}MGraph;
void InitG(MGraph& g) //初始化
{
int i, j;
for (i = 0; i < MaxVertenNum; i++)
{
g.Vex[i] = '\0';
}
for (i = 0; i < MaxVertenNum; i++)
for (j = 0; j < MaxVertenNum; j++)
g.Edge[i][j] = 0;
g.vexnum = NodeNum;
}
void CreateVex(MGraph &g) //创建顶点信息
{
VertexType ch;
printf("输入图的顶点:");
for (int i = 0; i < g.vexnum; i++)
{
scanf("%c", &ch);
g.Vex[i] = ch;
}
}
void CreateEdge(MGraph& g) //创建邻接矩阵信息
{
EdgeType b;
int i, j = 0;
printf("输入邻接矩阵信息:\n");
for (i = 0; i < g.vexnum; i++)
for (j = 0; j < g.vexnum; j++)
{
scanf("%d", &b);
g.Edge[i][j] = b;
}
}
void Info(MGraph& g) //图的顶点数和边数
{
int count = 0;
for (int i = 0; i < g.vexnum; i++)
for (int j = 0; j < g.vexnum; j++)
if (g.Edge[i][j] == 1) count++;
g.edgenum = count / 2;
}
int CountDegree(MGraph g, VertexType point) //统计每个顶点的度
{
int j, k, count = 0;
for (int i = 0; i < g.vexnum; i++)
if (g.Vex[i] == point) j = i;
for (int k = 0; k < g.vexnum; k++) if (g.Edge[j][k] == 1) count++;
return count;
}
void PrintG(MGraph g) //输出各顶点的连接情况
{
int i, j;
for (i = 0; i < g.vexnum; i++)
{
for (j = 0; j < g.vexnum; j++)
if (g.Edge[i][j] == 1) printf("%c->%c ", g.Vex[i], g.Vex[j]);
printf("\n");
}
}
int FirstNeighbor(MGraph g,VertexType x) //求图G中顶点x的第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回-1。
{
int i, j;
for (i = 0; i < g.vexnum; i++)
if (x == g.Vex[i]) j = i;
if (j >= g.vexnum) return -1; //图中不存在值为x的顶点
else
{
for (i = 0; i < g.vexnum; i++)
if (g.Edge[j][i] == 1) return i; //返回顶点号
if (i >= g.vexnum) return -1; //x没有邻接点
}
}
int NextNeighbor(MGraph g, VertexType x, VertexType y)
{
int i, j, k;
for (i = 0; i < g.vexnum; i++)
{
if (g.Vex[i] == x) j = i;
if (g.Vex[i] == y) k = i;
}
if (j >= g.vexnum || k >= g.vexnum) return false; //不存在顶点x或顶点y
else
{
for (i = k+1; i < g.vexnum; i++)
{
if (g.Edge[j][i] == 1) return i; //返回顶点号
}
if (i >= g.vexnum) return -1; //x没有邻接点
}
}
void PrintMatrix(MGraph g) //输出邻接矩阵
{
int i, j;
printf("输出邻接矩阵:\n");
for (i = 0; i < g.vexnum; i++)
printf("\t%c", g.Vex[i]);
printf("\n");
for (i = 0; i < g.vexnum; i++)
{
printf("%c", g.Vex[i]);
for (j = 0; j < g.vexnum; j++)
printf("\t%d", g.Edge[i][j]);
printf("\n");
}
printf("\n");
}
bool visited[MaxVertenNum]; //访问标记数组
void DFS(MGraph g, VertexType ch) //从顶点出发,深度优先遍历图
{
int i, j;
for (i = 0; i < g.vexnum; i++)
if (g.Vex[i] == ch) j = i;
printf("%c ", ch); //访问顶点
visited[j] = true; //设已访问标记
for (i = FirstNeighbor(g, g.Vex[j]); i >= 0; i = NextNeighbor(g, g.Vex[j], g.Vex[i]))
if (!visited[i]) DFS(g, g.Vex[i]); //尚未访问的邻接顶点
}
void DFSTraverse(MGraph g) //对图G进行深度优先遍历
{
int i;
for (i = 0; i < g.vexnum; i++) visited[i] = false; //初始化访问标记数据
for (i = 0; i < g.vexnum; i++) //从0号顶点出发,深度优先遍历图G
if (!visited[i]) DFS(g, g.Vex[i]);
}
int main()
{
MGraph g;
VertexType Vex[MaxVertenNum];
EdgeType Edge[MaxVertenNum][MaxVertenNum];
InitG(g);
CreateVex(g);
CreateEdge(g);
Info(g);
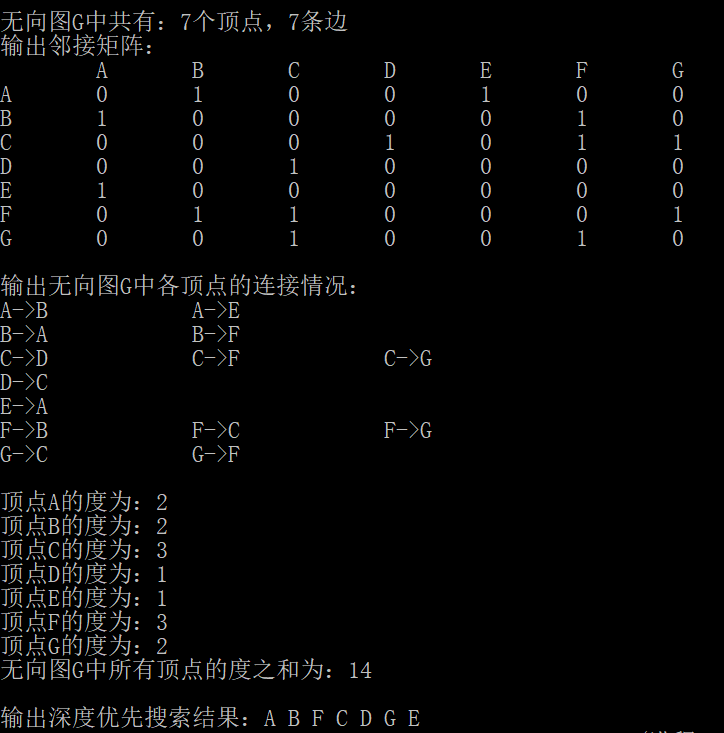
printf("\n无向图G中共有:%d个顶点,%d条边\n", g.vexnum, g.edgenum);
PrintMatrix(g);
printf("输出无向图G中各顶点的连接情况:\n");
PrintG(g);
printf("\n");
int sumdegree = 0, i;
for (i = 0; i < g.vexnum; i++)
{
int degree;
degree = CountDegree(g, g.Vex[i]);
printf("顶点%c的度为:%d\n", g.Vex[i], degree);
sumdegree = sumdegree + degree;
}
printf("无向图G中所有顶点的度之和为:%d\n", sumdegree);
printf("\n输出深度优先搜索结果:");
DFSTraverse(g);
return 0;
}
运行结果
程序分析
-
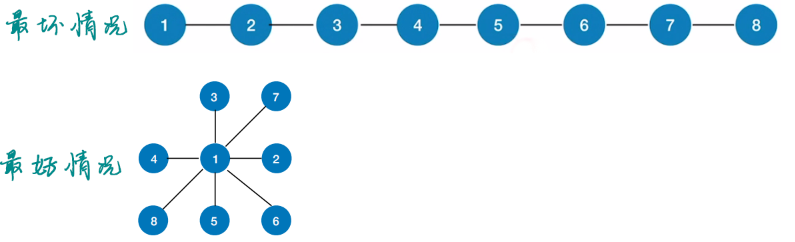
空间复杂度:来自函数调用栈,最坏情况,递归深度为O(|V|);最好情况,O(1)。
- 时间复杂度=访问各结点所需时间+探索各条边所需时间。
-
采用邻接矩阵存储方式时:访问|V|个顶点需要O(|V|)的时间,查找每个顶点的邻接点都需要O(|V|)的时间,而总共有|V|个顶点,因此
时间复杂度=O(|V|
2^2
2
)
。
代码实现(邻接表法)
#include<stdio.h>
#include<malloc.h>
#define MaxVertexNum 100
#define NodeNum 7 //顶点数
typedef char VertexType;
//图的类型声明
typedef struct ArcNode
{
int adjvex; //该边的邻接点编号
struct ArcNode* nextarc; //指向下条边的指针
//int weight; //该边的相关信息,如权值
}ArcNode; //边结点的类型
typedef struct VNode
{
VertexType data; //顶点信息
ArcNode* firstarc; //指向第一个边结点
}VNode;
typedef struct
{
VNode adjlist[MaxVertexNum]; //邻接表的头结点数组
int vexnum, edgenum; //图中的顶点数和边数
}AdjGraph; //完整的图邻接表类型
void InitG(AdjGraph& g)
{
int i;
for (i = 0; i < MaxVertexNum; i++)
{
g.adjlist[i].data = '\0';
g.adjlist[i].firstarc = NULL;
}
g.vexnum = NodeNum;
}
void CreateVNde(AdjGraph& g)
{
int i;
char ch;
printf("输入顶点信息:");
for (i = 0; i < g.vexnum; i++)
{
scanf("%c", &ch);
g.adjlist[i].data = ch;
g.adjlist[i].firstarc = NULL;
}
}
void CreateANode(AdjGraph& g, VertexType ch, int num)
{
ArcNode* p, * r = g.adjlist[0].firstarc;
int i, j, k;
while (num--)
{
p = (ArcNode*)malloc(sizeof(ArcNode));
p->nextarc = NULL;
printf("输入顶点的编号:");
scanf("%d", &i);
for (j = 0; j < g.vexnum; j++)
if (g.adjlist[j].data == ch) k = j;
if (i != k)
{
p->adjvex = i;
if (g.adjlist[k].firstarc == NULL)
{
g.adjlist[k].firstarc = p;
r = p;
}
else
{
r->nextarc = p;
r = p;
}
}
}
}
int FirstNeighbor(AdjGraph& g, VertexType x)
//求图G中顶点x的第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回 - 1
{
int i, j;
for (i = 0; i < g.vexnum; i++)
if (g.adjlist[i].data == x) j = i;
if (j >= g.vexnum) return -1; //图中不存在x
ArcNode* p = g.adjlist[j].firstarc;
if (p == NULL) return -1; //若x没有邻接点
else return p->adjvex; //返回顶点号
}
int NextNeighbor(AdjGraph& g, VertexType x, VertexType y)
//求图G中顶点x的第一个邻接点,若有则返回顶点号。若x没有邻接点或图中不存在x,则返回 - 1
{
int i, j, k;
for (i = 0; i < g.vexnum; i++)
{
if (g.adjlist[i].data == x) j = i;
if (g.adjlist[i].data == y) k = i;
}
if (j >= g.vexnum || k >= g.vexnum) return -1; //不存在顶点x或顶点y
else
{
ArcNode* p = g.adjlist[j].firstarc;
while (p != NULL)
{
if (p->adjvex == k)
{
if (p->nextarc != NULL) return p->nextarc->adjvex;
else return -1;
}
else p = p->nextarc;
}
}
}
void CountDegree(AdjGraph &g)
{
ArcNode* p;
int sumdegree = 0;
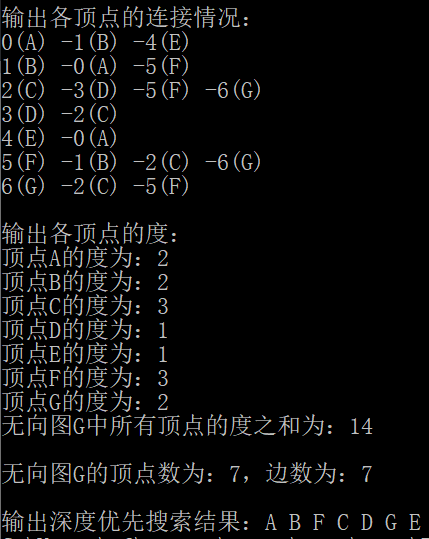
printf("输出各顶点的度:\n");
for (int i = 0; i < g.vexnum; i++)
{
p = g.adjlist[i].firstarc;
int degree = 0;
while (p != NULL)
{
degree++;
p = p->nextarc;
}
sumdegree += degree;
printf("顶点%c的度为:%d\n", g.adjlist[i].data, degree);
}
printf("无向图G中所有顶点的度之和为:%d", sumdegree);
g.edgenum = sumdegree / 2;
}
void PrintG(AdjGraph g)
{
int i;
ArcNode* p;
printf("输出各顶点的连接情况:\n");
for (i = 0; i < g.vexnum; i++)
{
p = g.adjlist[i].firstarc;
printf("%d(%c) ", i, g.adjlist[i].data);
while (p != NULL)
{
printf("-%d(%c) ", p->adjvex, g.adjlist[p->adjvex].data);
p = p->nextarc;
}
printf("\n");
}
printf("\n");
}
bool visited[MaxVertexNum]; //访问标记数组
void DFS(AdjGraph g, VertexType ch)
{
int i, j;
for (i = 0; i < g.vexnum; i++)
if (g.adjlist[i].data == ch) j = i;
printf("%c ", ch); //访问顶点
visited[j] = true; //设已访问标记
for (i = FirstNeighbor(g,g.adjlist[j].data); i >= 0; i = NextNeighbor(g, g.adjlist[j].data, g.adjlist[i].data))
if (!visited[i]) DFS(g, g.adjlist[i].data); //尚未访问的邻接顶点
}
void DFSTraverse(AdjGraph g) //对G进行深度优先遍历
{
int i;
for (i = 0; i < g.vexnum; i++) visited[i] = false; //初始化已访问标记数据
for (i = 0; i < g.vexnum; i++) //从0号顶点开始遍历
if (!visited[i]) DFS(g, g.adjlist[i].data);
}
int main()
{
AdjGraph g;
VertexType ch;
int i, num;
ArcNode* p;
InitG(g);
CreateVNde(g);
printf("\n");
for (i = 0; i < g.vexnum; i++)
{
printf("创建顶点%c的边结点\n", g.adjlist[i].data);
printf("输入要创建的边结点的个数:");
scanf("%d", &num);
CreateANode(g, g.adjlist[i].data, num);
printf("\n");
}
PrintG(g);
CountDegree(g);
printf("\n");
printf("\n无向图G的顶点数为:%d,边数为:%d\n", g.vexnum, g.edgenum);
printf("\n输出深度优先搜索结果:");
DFSTraverse(g);
return 0;
}
运行结果
程序分析
-
空间复杂度:来自函数调用栈,最坏情况,递归深度为O(|V|);最好情况,O(1)。
- 时间复杂度=访问各结点所需时间+探索各条边所需时间。
-
采用邻接表存储方式时:访问|V|个顶点需要O(|V|)的时间,查找各个顶点的邻接点共需要O(|E|)的时间,
时间复杂度= O(|V|+|E|)
。
版权声明:本文为weixin_42071236原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。