1.协方差
在下面讲解之前,先提一下方差。
均值反映的样本平均水平,例如我们班平均分90分,证明整个班不错,但是不能反映个人。
这时我们就需要用到标准差或者方差,如果其结果较大时,表明班里很有可能有考100的,和考不及格的。
那么什么是协方差呢?
协方差反映了不同因素的相关程度,比如西瓜屁股小和西瓜甜是否有关,应用协方差就可以解决这个问题。

上式为x与y的协方差。
咱们不直接分析cov为正或是为负时,x与y正相关还是负相关。
我们先讨论一下相关……一个大另一个也大,一个大另一个就小…………也就是他们之间存在联系,但是我们还没有公式能够取表达这个关系。
我们从cov的公式可以看出,如果x大于平均值时,y也大于平均值,那么我们得到一个正数;如果x大于平均值时,y小于平均值,那么我们就得到了一个负数。我们把所有结果加和,结果为正数时,说明x大于平均值时,y也大于平均值的概率大,证明x,y很有可能是正相关(一个大另一个也大),反之可得到负相关。当然也有人说能得到0……不相关……我觉得很难得到0,总会有点偏差,只能说误差在多大范围内可认为x与y不相关。
其实上面的东西记住就好,比较低端,接下来说一下协方差矩阵(三维变量的相关性表示)。
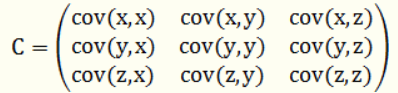
矩阵对角线为各参数的方差,而且是个对称矩阵。
如何用呢?下面我们来谈下点云求法线
2.点云求法线
我们通过立体视觉系统获得了一个曲面的点云(例如水面),然后我们想要重建曲面,我们需要两个信息,曲面的法线和曲面的3D点,点云就是我们的曲面3D点,因此我们需要求曲面的法线。
点云求法线比较经典的文献
Semantic 3D Object Maps for Everyday Manipulation in Human Living Environments
想必大家来看二郎的博客,不太想自己去看英文文献吧。
其主要的思想在于
求曲面一点s的法线时,通过曲面附近的点拟合一个平面,然后求拟合平面s点的法线。(假设:曲面连续变化)
这里涉及的重要知识点是:哪些可以定义为附近点?
英文文献中指明了几种方法,这里不赘述,只需要知道有这些东西就好了。
还有另一种方法,不用拟合,直接求法线,我们以s点为中心,s点到附近点的向量均在一个平面,法线垂直于该平面,因此可以通过点积为0找到法线。
关于推导,看下这篇博文,我觉得写得还行
https://blog.csdn.net/linmingan/article/details/80586214
里面涉及了协方差矩阵。
多啰嗦一句,协方差矩阵一般用来降维和去相关,去相关:将协方差矩阵转换为对角矩阵。
