void TIM4_Init(u16 arr,u16 psc)
{
TIM4_Handler.Instance=TIM4;
TIM4_Handler.Init.Prescaler=psc; //分频系数
TIM4_Handler.Init.CounterMode=TIM_COUNTERMODE_UP; //向上计数器
TIM4_Handler.Init.Period=arr; //自动装载值
TIM4_Handler.Init.ClockDivision=TIM_CLOCKDIVISION_DIV1;//时钟分频因子
TIM4_Encoder_Handler.EncoderMode=TIM_ENCODERMODE_TI12;
TIM4_Encoder_Handler.IC1Filter=0;
TIM4_Encoder_Handler.IC1Polarity=TIM_ICPOLARITY_RISING;
TIM4_Encoder_Handler.IC1Prescaler=TIM_ICPSC_DIV1;
TIM4_Encoder_Handler.IC1Selection=TIM_ICSELECTION_DIRECTTI;
TIM4_Encoder_Handler.IC2Filter=0;
TIM4_Encoder_Handler.IC2Polarity=TIM_ICPOLARITY_RISING;
TIM4_Encoder_Handler.IC2Selection=TIM_ICSELECTION_DIRECTTI;
TIM4_Encoder_Handler.IC2Prescaler=TIM_ICPSC_DIV1;
HAL_TIM_Encoder_Init(&TIM4_Handler,&TIM4_Encoder_Handler);
HAL_TIM_Encoder_Start(&TIM4_Handler,TIM_CHANNEL_ALL);
HAL_TIM_Encoder_Start_IT(&TIM4_Handler,TIM_CHANNEL_ALL);//开启中断
TIM4->CNT=1000;
__HAL_TIM_ENABLE_IT(&TIM4_Handler,TIM_IT_UPDATE); //使能更新中断
__HAL_TIM_ENABLE(&TIM4_Handler);
}
在这里我们配置编码器模式,开启时钟和溢出中断
//回调函数,定时器中断服务函数调用
void HAL_TIM_PeriodElapsedCallback(TIM_HandleTypeDef *htim)
{
if(htim==(&TIM4_Handler))
{
if ( (TIM4->CR1&0x0010) == 0 ) //向上计数溢出 {
Interupt_Num++ ;
}
else //向下计数溢出
{
Interupt_Num– ;
}
}
}
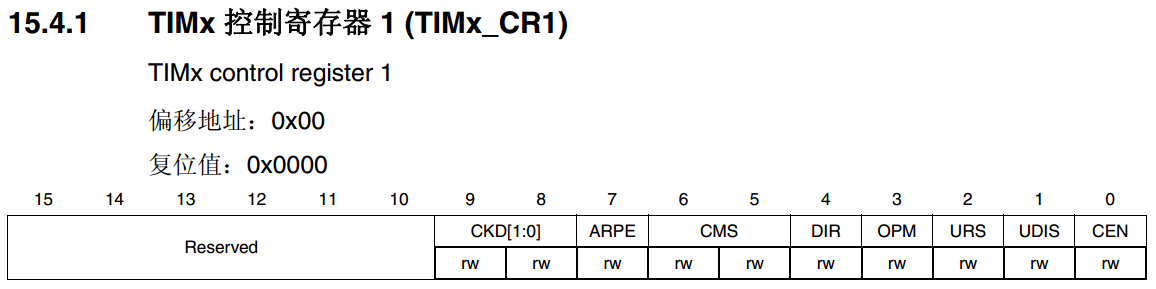
在中断回调函数里,我们将TIM4->CR1的第5位不变,假如第五位是0,应选择递增计数,我们让计数器增加1。(0x0010==0000 0000 0001 0000)这里的次数我们是在计算溢出次数。要注意我们在TIM4_Init() 是把计数器CNT的值设为了1000,而ARR设置成了2000,这样计数器每次开始工作都是从1000->2000,0->2000,0->2000这样循环,Interupt_Num的值就是我们记录的溢出总数,而最开始的一次溢出是从1000开始,所以总的脉冲数就是 (溢出总数-1)*2000+1000(最开始的1000)+ CNT(计数器内未达到2000的值),之所以用溢出总数-1是因为我们总的脉冲数里把最开始1000->2000的值加进去了,所以要减去1000->2000的一次溢出次数。
TIM4_Init(2000,3);在主函数内初始化TIM4时设置了ARR为2000。
void Circle_Print()
{
AAA =Pulse_Num;
if (Interupt_Num ==0 ) //CNT从1000开始,刚开始的时候计算脉冲的方法
Pulse_Num = TIM4->CNT-1000 ;
else
{
Pulse_Num = 1000 + (Interupt_Num – 1) *2000 +TIM4->CNT ; //在第一圈完成之后,计算脉冲数多的方法
}
speed =(Pulse_Num-AAA);//每100ms转过的脉冲,近似看成速度了
Circle_NUm = Pulse_Num/1560.0f ; //所有人脉冲除以细分数就可以得到转的圈数(正负之分)
printf(“Interupt_Num的值是:%ld–捕获到的总数是%ld*****转过的圈数是%f*****本次脉冲为%f\r\n” , Interupt_Num, Pulse_Num , Circle_NUm ,speed );
}
AAA是我设置用来计算速度的变量。在每次最开始调用Circle_Print()的时候我们首先把测过的总的脉冲数赋给变量AAA,此时AAA=0,,然后在Pulse_Num = 1000 + (Interupt_Num – 1) *2000 +TIM4->CNT ; //在第一圈完成之后,计算脉冲数多的方法这一句计算总的脉冲数,计算原理我们已经在上一条说过了。然后在这一句speed =(Pulse_Num-AAA);我们用至今为此总的脉冲数减去AAA即为每两次调用Circle_Print()的脉冲差,而我们在主函数中使用一个100ms的延时,所以时间差为100ms,脉冲反映小车路程,可以得到速度。
***硬件***
我使用的编码器(6线,分AB相,客服叫做13相?不太懂)转一圈是390个脉冲,使用四倍频,转一圈即为1560个脉冲。用总脉冲数除以1560即为至今为止转过的圈数。
小车直径为6.3cm(没找到参数,手动测量的0.0), 周长约为0.204m.
***下载验证***
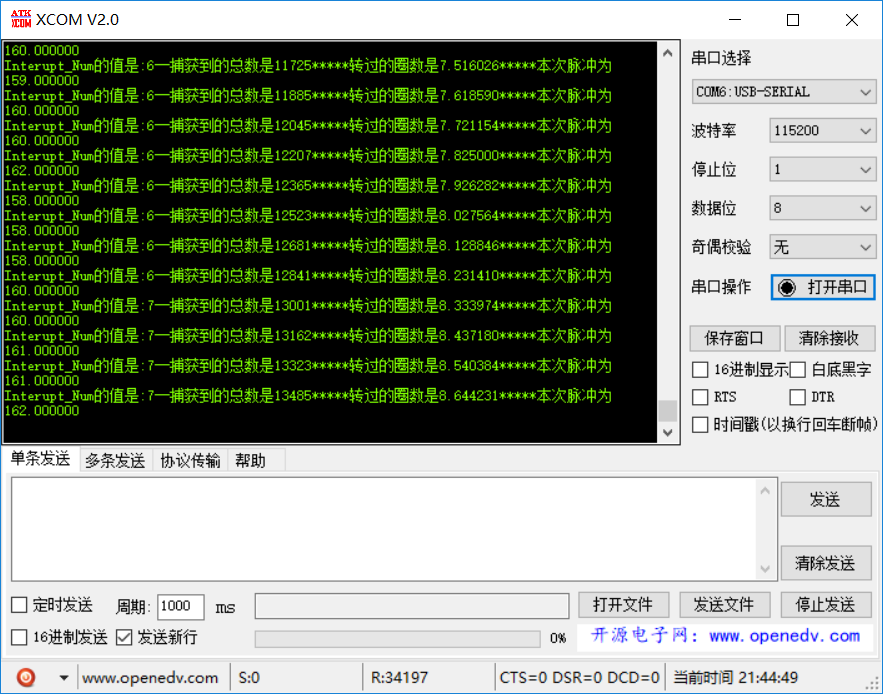
可以看到,第一个返回总的溢出数,第二个为总圈数,第三个为速度。
因为在主函数中使用一个100ms的延时,每0.1秒转过的脉冲数为160左右,约为0.1圈,每秒转过1圈。
***tips***
在@北名茗水 的中断回调函数程序里有一句PB0!=PB0;而我的电机一IN1接的就是PB0,我改的时候忘记删掉了这句,然后我的第一个轮子(编码器接的第二个轮子)就一会转一会不转0.0
在文件中写入了函数之后要在头文件和主函数里添加初始化,否则不会识别。
TIM4_Init(2000,3);在主函数内初始化TIM4时设置了ARR为2000。
欢迎批评斧正。
|
![89MVP0O2BU~@CJ){Y]]`JD2.png](https://img-blog.csdnimg.cn/img_convert/5090d9c63fe1a889c01dc598b6668d68.png)