目录
1 博客内容
本文介绍电磁阀控制、Simulink建模、CAN通讯、VCU芯片等串联简化,分7步实现应用层、底层、控制目标联关联,并应用于PS2手柄遥控四驱小车。相关的STM32芯片嵌入式基础开发学习,大概使用1.5个月的时间,内容获取途径为B站的视频和C站的博客。代码下载,https://gitee.com/morven_x/ps2_-veh。
2 参考资料
2.1 Sumulink模型搭建及代码生成参考文件
– Sumulink模型搭建,引用软件工程师chhttty博客:
“机甲大师机器人控制(Simulink)”
;
-Sumulink代码生成,参考Mathworks公司董工视频:
“基于Simulink模型的嵌入式代码生成”
。
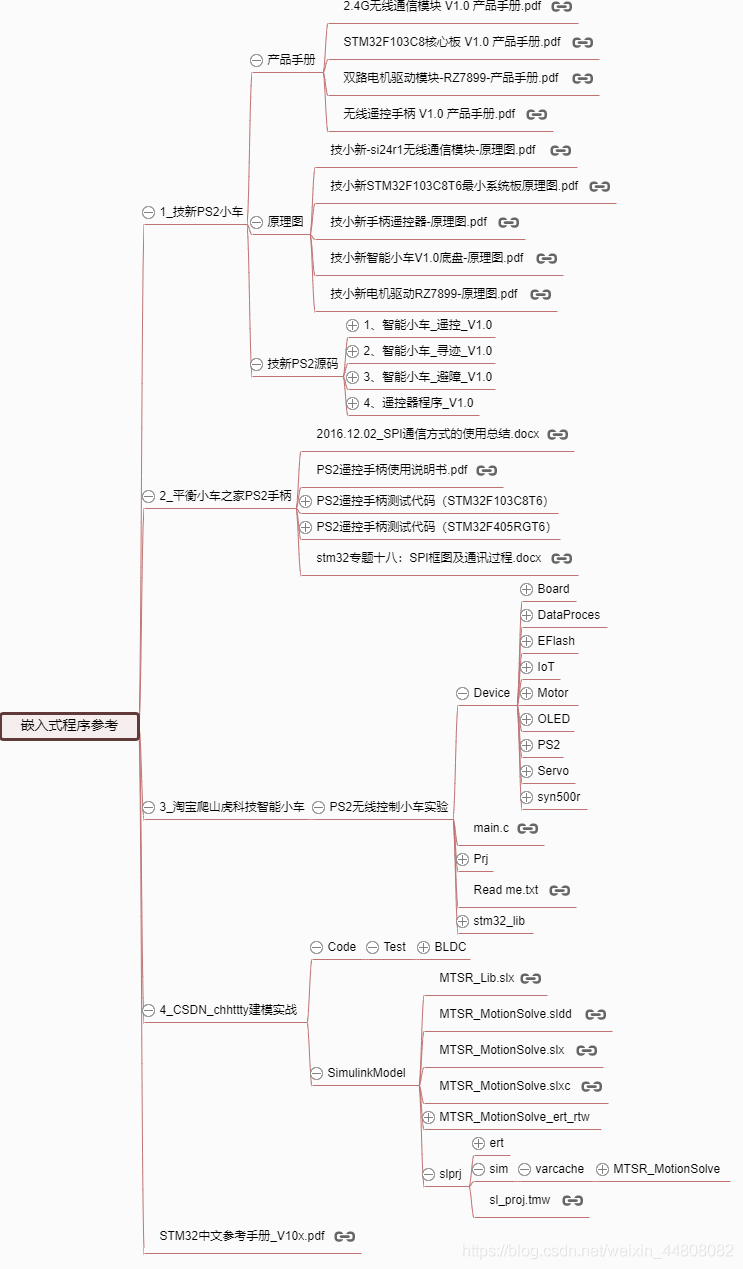
2.2 嵌入式代码参考文件
– 嵌入式代码参考技新小车、平衡之家、爬山虎科技和Chhttty,详细如下:
3 开发过程
STM32嵌入式基础开发过程分为7步:
·

7步实现的具体方法,参考如下博客链接:
–
STM32嵌入式基础开发01-点亮LED灯(1_LED)
。
–
STM32嵌入式基础开发02-系统定时器实现灯闪烁(2_Delay)
。
–
STM32嵌入式基础开发03-通用定时器TIM3输出PWM(3_PWM)
。
–
STM32嵌入式基础开发04-PS2手柄SPI通讯数据输出(4_SPI)
。
–
STM32嵌入式基础开发05-通用定时器TIM2/4输出PWM(5_PWM_Veh)
。
–
STM32嵌入式基础开发06-通用定时器和SPI通讯同步输出(6_SPI_PWM_Veh))
。
–
STM32嵌入式基础开发07-使用PS2手柄遥控麦克纳姆轮小车(7_PS2_Veh))
。
–
STM32嵌入式基础开发附A-使用Logic analyzer 查看PWM输出
。
–
STM32嵌入式基础开发附B-STM32-PWM输出错误更改
。
–
STM32嵌入式基础开发附C-STM32-CAN通讯
。
4 回顾总结文件
4.1 问题回顾

更多过程数据暂取消不展示
。
4.2 总结回顾


更多过程PPT信息取消不展示
。





































