本文为学习ardupilot官网文档做的笔记。
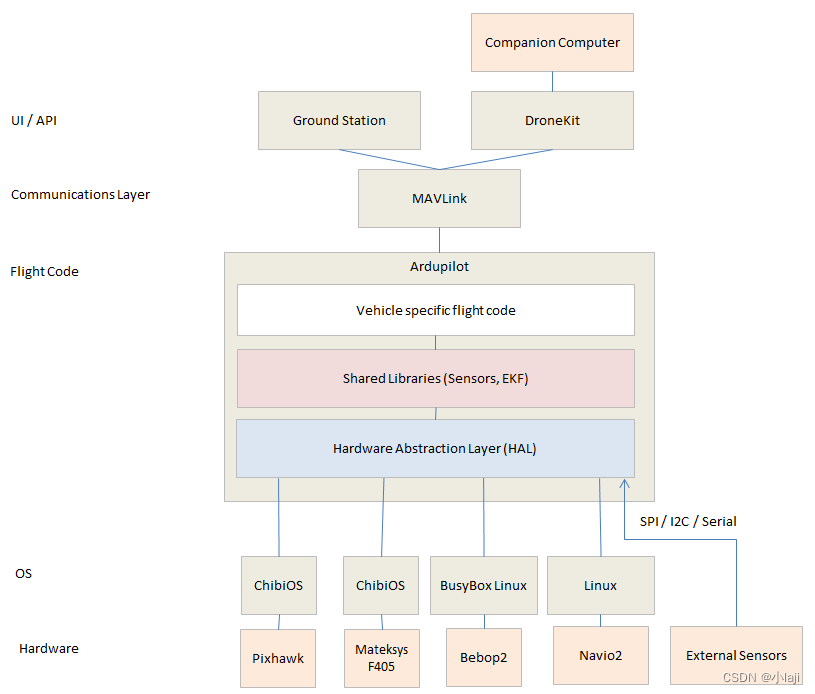
ardupilot总体架构
ArduCopter架构

手动模式架构(Stabilize、Acro、Drift)
自动模式架构(RTL、Guided、Auto)

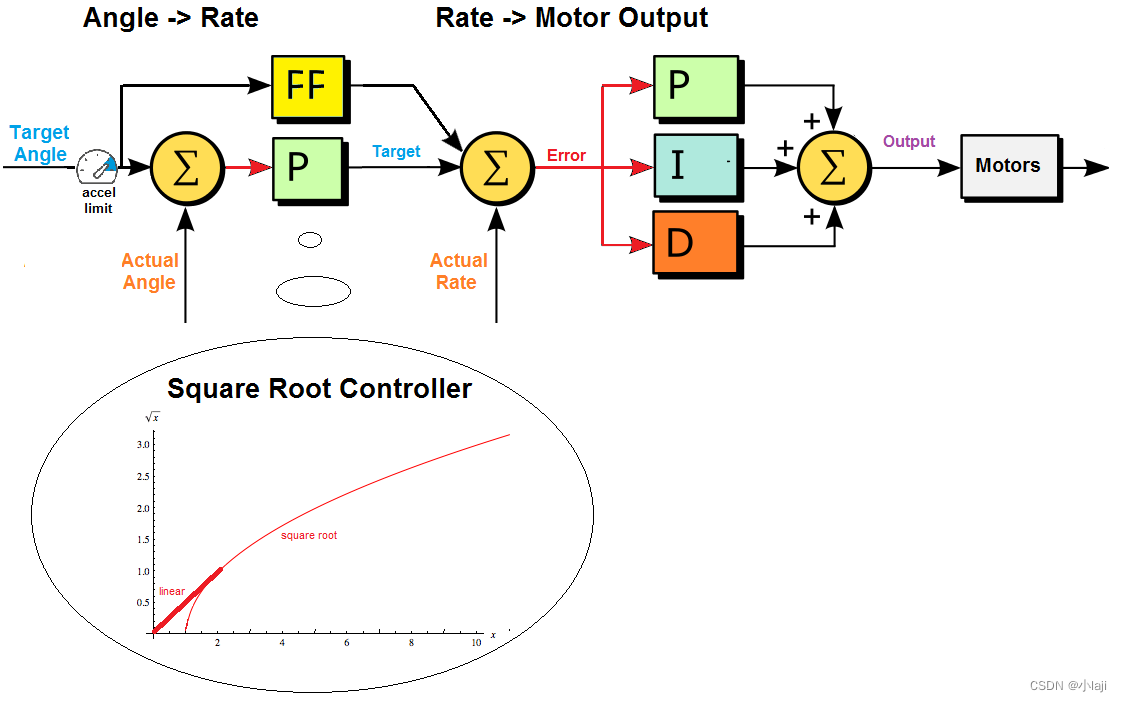
Copter姿态控制流程
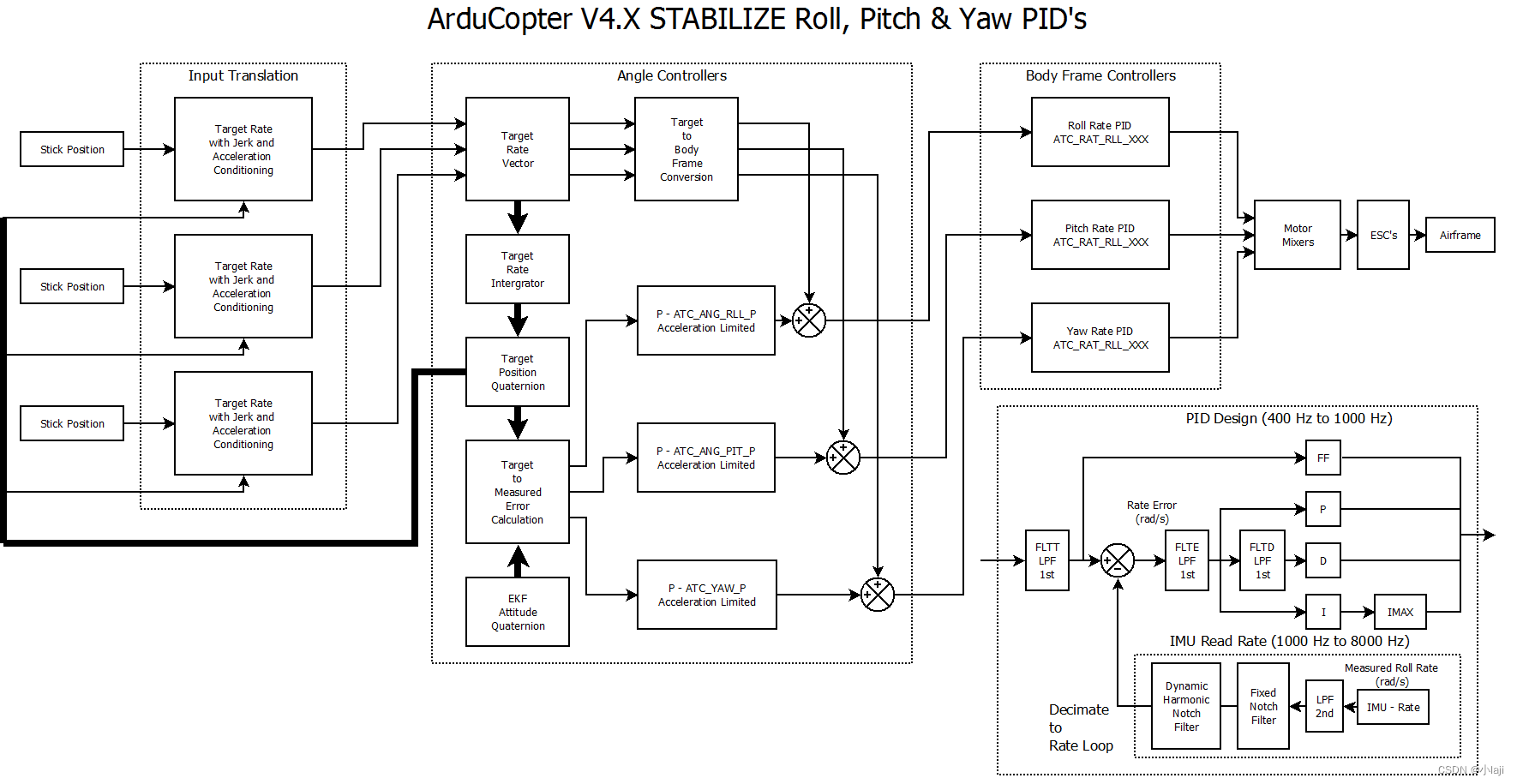
AP控制器将角度误差(目标角度和实际角度之间的差异)转换为所需的转速,然后PID控制器将转速误差转换为高级电机命令。
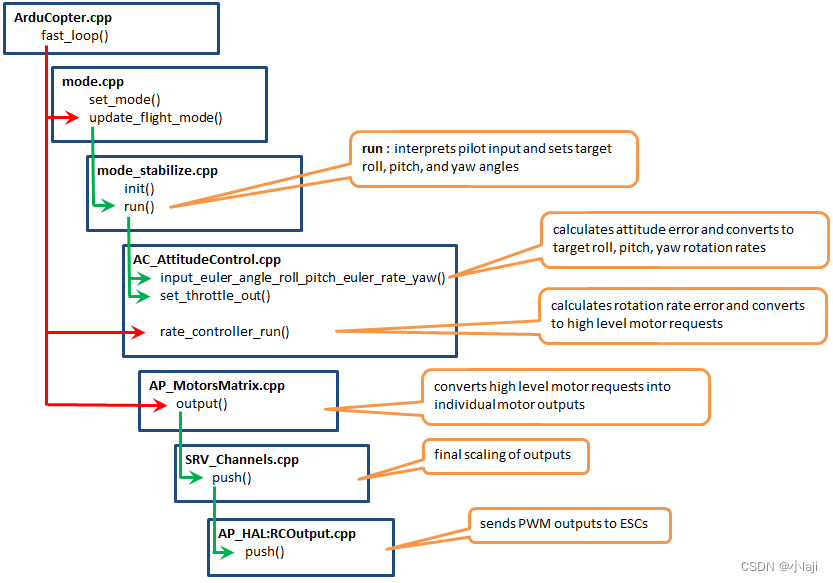
手动模式流程
-
调用顶层 flight-mode.cpp 的“update_flight_mode()”函数。该函数检查飞行器的飞行模式(即“control_mode”变量),然后调用相应的<flight mode>_run() 函数(即
stable_run
用于稳定模式,
rtl_run
用于RTL 模式等)。<flight mode>_run() 函数可以在mode_<flight mode>.cpp 文件中找到(即
mode_stabilize.cpp
、
mode_rtl.cpp
等)。 - <flight mode>_run函数负责将用户输入(在 g.rc_1.control_in、g.rc_2.control_in 等中找到)转换为适合该飞行模式的倾斜角、旋转速率、爬升速率等。例如,AltHold将用户的滚转和俯仰输入转换为倾斜角(以度为单位),偏航输入转换为旋转速率(以度/秒为单位),油门输入转换为爬升速率(以 cm/s 为单位)。
-
<flight mode>_run 函数必须做的最后一件事是将这些所需的角度、速率等传递到 Attitude Control 和/或 Position Control 库(它们都保存在
AC_AttitudeControl
文件夹中)。 -
AC_AttitudeControl库提供了 5
种
可能的方式来控制车辆的姿态,下面介绍最常见的 3 种。
angle_ef_roll_pitch_rate_ef_yaw()
:这接受滚转和俯仰的NED角度,以及偏航的NED速率。例如,提供此功能 roll = -1000, pitch = -1500, yaw = 500 表示车辆向左倾斜 10 度,向前倾斜 15 度并以 5 度/秒的速度向右旋转。
angle_ef_roll_pitch_yaw()
:这接受用于滚转、俯仰和偏航的NED角度。与上面类似,除了提供 500 的偏航意味着将车辆旋转到北方以东 5 度。
rate_bf_roll_pitch_yaw()
:这接受滚转、俯仰和偏航的机体系速率(以度/秒为单位)。例如,提供这个函数 roll = -1000, pitch = -1500, yaw = 500 将导致车辆以 10 度/秒的速度向左滚动,以 15 度/秒的速度向前俯仰并以 5 度/秒的速度绕车辆的 z 轴旋转。
在对这些函数进行任何调用后,将调用
AC_AttitudeControl::rate_controller_run()
。 这会将上面列出的方法的输出转换为滚转、俯仰和偏航输入,这些输入通过它的
set_roll、set_pitch、set_yaw 和 set_throttle
方法发送到
AP_Motors库。
-
AC_PosControl库允许对
车辆
进行 3D 位置控制。通常只使用更简单的 Z 轴(即高度控制)方法,因为更复杂的 3D 位置飞行模式(即
Loiter
)使用
AC_WPNav
库。无论如何,这个库的一些常用方法包括:-
set_alt_target_from_climb_rate()
:接受以 cm/s 为单位的爬升率并更新绝对高度目标 -
set_pos_target()
: 这接受一个 3D 位置向量,它是一个以厘米为单位的离家的偏移量
-
如果调用了 AC_PosControl 中的任何方法,则飞行模式代码也必须调用
AC_PosControl::update_z_controller()
方法。这将运行 z 轴位置控制 PID 循环并将低级油门级别发送到
AP_Motors
库。如果调用任何 xy 轴方法,则必须调用
AC_PosControl::update_xy_controller()
。
- AP_Motors 库包含“电机混控”代码。该代码负责将从 AC_AttitudeControl 和 AC_PosControl 库接收到的横滚、俯仰、偏航和油门值转换为绝对电机输出(即 PWM 值)。
-
set_roll(), set_pitch(), set_yaw()
: 接受 -4500 ~ 4500 范围内的滚动、俯仰和偏航值。这些不是所需的角度甚至速率,而只是一个值。例如 set_roll(-4500) 意味着尽可能快地向左滚动。 - set_throttle() :接受 0 ~ 1000 范围内的绝对油门值。0 = 电机关闭,1000 = 全油门。
-
每种框架类型(quad、Y6、传统直升机)都有不同的类,但在每个框架中都有一个“
output_armed
”函数,负责将这些横滚、俯仰、偏航和油门值转换为 pwm 输出。这种转换通常包括实现一个“稳定性补丁”,当输入请求超出框架的物理限制时(即,最大油门和最大滚动在四边形中是不可能的,因为某些电机必须更少比其他人造成滚动)。在“output_armed”函数的底部有一个对 hal.rcout->write() 的调用,它将所需的 pwm 值传递给 AP_HAL 层。 -
AP_HAL
库
(硬件抽象层)为所有板提供一致的接口。特别是 hal.rc_out_write() 函数将使从 AP_Motors 类接收到的指定 PWM 出现在电路板的适当 pwm 引脚输出上。
Copter电机库
Motors库的类层次结构图

电机库的输入
姿态控制器向电机库提供高级滚转、俯仰、偏航和油门命令,范围为-1到1(滚转、俯仰和偏航)与0到1(油门)。姿态控制器发出这些命令的确切位置可以在AC_AttitudeControl_Multi的
rate_controller_run()
函数中找到。
void AC_AttitudeControl_Multi::rate_controller_run()
{
Vector3f gyro_latest = _ahrs.get_gyro_latest();
_motors.set_roll(rate_target_to_motor_roll(gyro_latest.x, _rate_target_ang_vel.x));
_motors.set_pitch(rate_target_to_motor_pitch(gyro_latest.y, _rate_target_ang_vel.y));
_motors.set_yaw(rate_target_to_motor_yaw(gyro_latest.z, _rate_target_ang_vel.z));
所用方法定义见
AP_Motors_Class.h
// set_roll, set_pitch, set_yaw, set_throttle
void set_roll(float roll_in) { _roll_in = roll_in; }; // range -1 ~ +1
void set_pitch(float pitch_in) { _pitch_in = pitch_in; }; // range -1 ~ +1
void set_yaw(float yaw_in) { _yaw_in = yaw_in; }; // range -1 ~ +1
void set_throttle(float throttle_in) { _throttle_in = throttle_in; }; // range 0~1
电机库的作用
- 将姿态控制器的高电平输入转换为单独的电机和伺服输出
-
设置限制标志以避免姿态和油门控制器中的“积分饱和”。尽管车辆可以在不设置这些标志的情况下飞行,但它们对于防止倾斜角控制中的过冲以及自动着陆检测非常重要。限制保存在
AP_Motors_Class::limit
变量中。
// structure for holding motor limit flags
struct AP_Motors_limit {
uint8_t roll_pitch : 1; // we have reached roll or pitch limit
uint8_t yaw : 1; // we have reached yaw limit
uint8_t throttle_lower : 1; // we have reached throttle's lower limit
uint8_t throttle_upper : 1; // we have reached throttle's upper limit
} limit;
Copter位置控制和导航
类层次结构和描述

在最高级别,AC_WPNav、AC_Circle 和 AC_Loiter 库是对等的,都使用 AC_PosControl 库
-
AC_WPNav
-
由三个独立的控制器组成(将来可能会分离到单独的库中):
- Waypoint(航点控制器)尝试将车辆直线飞行到目标航点。此接口接受指定为纬度、经度和高度或作为与 EKF 原点的偏移量的 3D 目标目的地
- Spline(样条线控制器)将车辆以平滑的曲线路径飞行到 3D 目标航路点,最终速度将允许其平稳地继续朝下一个航路点前进。它的接口与上面的 Waypoint 控制器非常相似
- Brake(刹车控制器)试图让车辆尽快停下来
- Waypoint、Spline 和 Brake 控制器不直接使用 PID。相反,它们更新目标位置或速度,然后将其传递给位置控制器

AC_PosControl:
-
水平(X 和 Y 轴)控制和垂直(Z 轴)控制的单独接口。这些接口是分开的,因为某些飞行模式(如 AltHold 模式)只需要 Z 轴控制器
-
使用分层 PID 控制器
- XY 轴使用位置 P控制器将位置误差转换为目标速度。速度 PID 将速度误差转换为所需的加速度,然后将其转换为所需的倾斜角,然后将其发送到姿态控制库中。
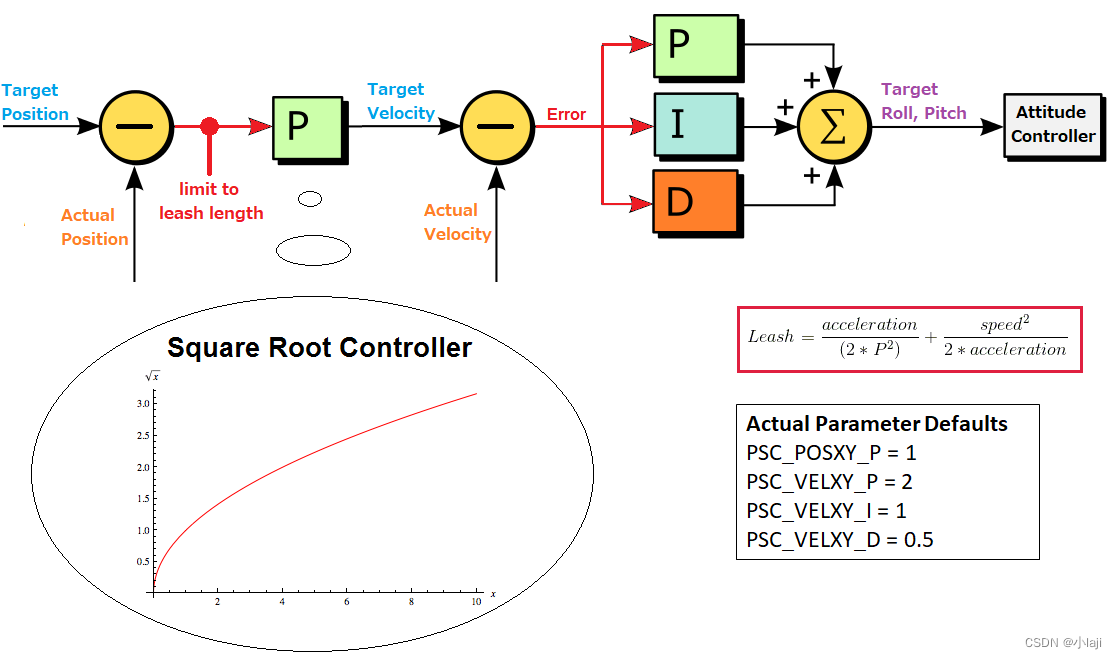
- Z 轴使用位置 P 控制器将位置误差转换为目标垂直速度(也称为爬升率)。速度 P 控制器将速度误差转换为所需的加速度。加速度 PID 将加速度误差转换为所需的油门,然后将其发送到姿态控制库(主要只是将其传递到低级电机库)
-
AC_PosControl 还包括一个 3D 速度控制器和一个 3D 位置+速度控制器
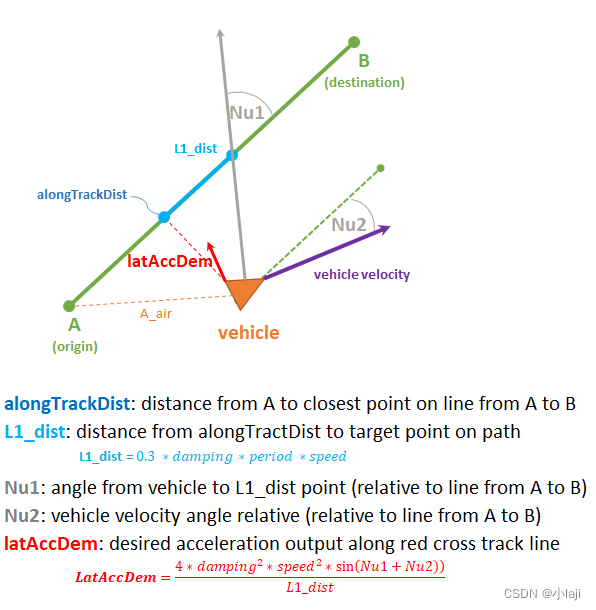
L1制导律
L1 控制器的
update_waypoint 方法
的最终输出是所需的横向加速度(在下面红色中显示为“latAccDem”),它将使车辆回到起点和终点之间的线。
使用的公式也如下所示。
阻尼
来自
NAVL1_DAMPING
参数。
period
来自
NAVL1_PERIOD
参数。
ArduPlane架构
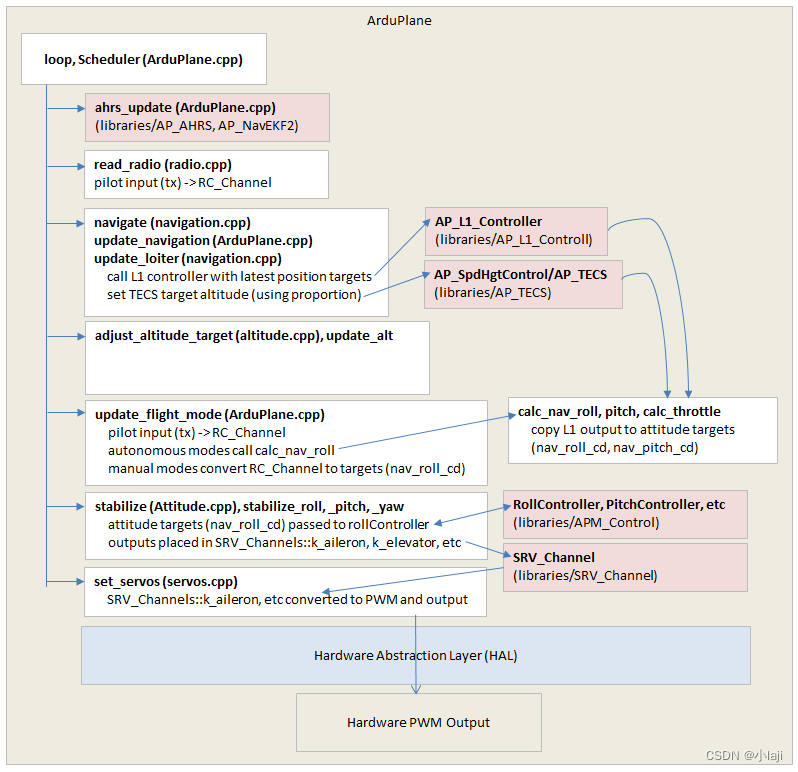
-
ahrs_update
调用 EKF 以使用最新的传感器数据并产生姿态和位置估计。 -
read_radio
读取飞行员的输入并计算适当的姿态或位置目标 -
navigate
调用 L1 和 TECS 控制器(见下文)为横滚、俯仰和油门控制器转换位置目标 -
update_flight_mode
将 L1 控制器的滚动和俯仰目标复制到 nav_roll_cd 和 nav_pitch_cd 全局变量 -
stabilize
执行较低级别的横滚、俯仰和油门控制器 -
set_servos
将横滚、俯仰和油门控制器的输出发送到适当的伺服输出
Plane控制器
Plane有两个高级控制器和至少3个低级控制器。

- L1控制器将起点和终点(分别表示为纬度、经度)转化为横向加速度,使车辆沿起点到终点的路径水平行驶。
- TECS(总节能系统)控制车辆的动能(即速度)与其势能(即高度)之间的交换。它的输入是目标速度和高度,它试图通过计算目标油门和俯仰值来达到这些目标,然后将这些值传递给较低级别的俯仰和油门控制器。