一、简单因子图优化测试
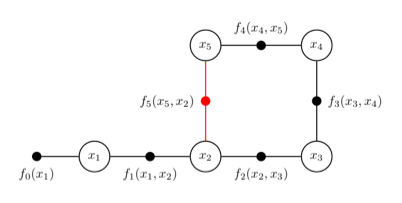
图示,这是官网的一个2D位姿图优化示例,大概是这样一个意思,一共右5个站点,首先机器人从x1点,朝同一方向经过x2,x3,然后x3站点旋转90度到达站点x4,再然后站点4再经90度旋转到达x5点, x再旋转90度发现”这个地方好像来过“——通过x2,x5之间建立约束关系。
ps:机器人底盘里程计计算在每两个站点间距离均为5m,实际上并没有5m,每个站点实际到达可能要差一点儿,那么累积误差就比较大了,这也是为什么要回环检测,然后作图优化的原因。
源代码:
#include <gtsam/geometry/Pose2.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/Values.h>
#include <gtsam/inference/Symbol.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/nonlinear/GaussNewtonOptimizer.h>
#include <gtsam/nonlinear/Marginals.h>
using namespace std;
using namespace gtsam;
int main(int argc, char** argv)
{
NonlinearFactorGraph graph;
Values initials;
initials.insert(Symbol('x', 1), Pose2(0.2, -0.3, 0.2));
initials.insert(Symbol('x', 2), Pose2(5.1, 0.3, -0.1));
initials.insert(Symbol('x', 3), Pose2(9.9, -0.1, -M_PI_2 - 0.2));
initials.insert(Symbol('x', 4), Pose2(10.2, -5.0, -M_PI + 0.1));
initials.insert(Symbol('x', 5), Pose2(5.1, -5.1, M_PI_2 - 0.1));
initials.print("\nInitial Values:\n");
//固定第一个顶点,在gtsam中相当于添加一个先验因子
noiseModel::Diagonal::shared_ptr priorModel = noiseModel::Diagonal::Sigmas(Vector3(1.0, 1.0, 0.1));
graph.add(PriorFactor<Pose2>(Symbol('x', 1), Pose2(0, 0, 0), priorModel));
//二元位姿因子
noiseModel::Diagonal::shared_ptr odomModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
graph.add(BetweenFactor<Pose2>(Symbol('x', 1), Symbol('x', 2), Pose2(5, 0, 0), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 2), Symbol('x', 3), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 3), Symbol('x', 4), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 4), Symbol('x', 5), Pose2(5, 0, -M_PI_2), odomModel));
//二元回环因子
noiseModel::Diagonal::shared_ptr loopModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
graph.add(BetweenFactor<Pose2>(Symbol('x', 5), Symbol('x', 2), Pose2(5, 0, -M_PI_2), loopModel));
graph.print("\nFactor Graph:\n");
GaussNewtonParams parameters;
parameters.setVerbosity("ERROR");
parameters.setMaxIterations(20);
parameters.setLinearSolverType("MULTIFRONTAL_QR");
GaussNewtonOptimizer optimizer(graph, initials, parameters);
Values results = optimizer.optimize();
results.print("Final Result:\n");
Marginals marginals(graph, results);
cout << "x1 covariance:\n" << marginals.marginalCovariance(Symbol('x', 1)) << endl;
cout << "x2 covariance:\n" << marginals.marginalCovariance(Symbol('x', 2)) << endl;
cout << "x3 covariance:\n" << marginals.marginalCovariance(Symbol('x', 3)) << endl;
cout << "x4 covariance:\n" << marginals.marginalCovariance(Symbol('x', 4)) << endl;
cout << "x5 covariance:\n" << marginals.marginalCovariance(Symbol('x', 5)) << endl;
return 0;
}
过程解析:
第一步: 构建因子图模型
NonlinearFactorGraph graph;
第二步:初始化顶点值
Values initials;
initials.insert(Symbol('x', 1), Pose2(0.2, -0.3, 0.2));
initials.insert(Symbol('x', 2), Pose2(5.1, 0.3, -0.1));
initials.insert(Symbol('x', 3), Pose2(9.9, -0.1, -M_PI_2 - 0.2));
initials.insert(Symbol('x', 4), Pose2(10.2, -5.0, -M_PI + 0.1));
initials.insert(Symbol('x', 5), Pose2(5.1, -5.1, M_PI_2 - 0.1));
第三步:固定第一个顶点,添加一个系统先验,一元因子
noiseModel::Diagonal::shared_ptr priorModel = noiseModel::Diagonal::Sigmas(Vector3(1.0, 1.0, 0.1));
graph.add(PriorFactor<Pose2>(Symbol('x', 1), Pose2(0, 0, 0), priorModel));
第四步:添加位姿间约束,二元因子
noiseModel::Diagonal::shared_ptr odomModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
graph.add(BetweenFactor<Pose2>(Symbol('x', 1), Symbol('x', 2), Pose2(5, 0, 0), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 2), Symbol('x', 3), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 3), Symbol('x', 4), Pose2(5, 0, -M_PI_2), odomModel));
graph.add(BetweenFactor<Pose2>(Symbol('x', 4), Symbol('x', 5), Pose2(5, 0, -M_PI_2), odomModel));
第五步:添加回环间约束,二元因子
noiseModel::Diagonal::shared_ptr loopModel = noiseModel::Diagonal::Sigmas(Vector3(0.5, 0.5, 0.1));
graph.add(BetweenFactor<Pose2>(Symbol('x', 5), Symbol('x', 2), Pose2(5, 0, -M_PI_2), loopModel));
第六步:问题求解,这里用的是高斯牛顿法
GaussNewtonParams parameters;
parameters.setVerbosity("ERROR");
parameters.setMaxIterations(20);
parameters.setLinearSolverType("MULTIFRONTAL_QR");
GaussNewtonOptimizer optimizer(graph, initials, parameters);//因子图 初始值 参数对象
Values results = optimizer.optimize();
results.print("Final Result:\n");
第七步:边缘化,计算每个变量的协方差矩阵
Marginals marginals(graph, results);
运行结果:
Factor Graph:
size: 6
Factor 0: PriorFactor on x1
prior mean: (0, 0, 0)
noise model: diagonal sigmas[1; 1; 0.1];
Factor 1: BetweenFactor(x1,x2)
measured: (5, 0, 0)
noise model: diagonal sigmas[0.5; 0.5; 0.1];
Factor 2: BetweenFactor(x2,x3)
measured: (5, 0, -1.57079633)
noise model: diagonal sigmas[0.5; 0.5; 0.1];
Factor 3: BetweenFactor(x3,x4)
measured: (5, 0, -1.57079633)
noise model: diagonal sigmas[0.5; 0.5; 0.1];
Factor 4: BetweenFactor(x4,x5)
measured: (5, 0, -1.57079633)
noise model: diagonal sigmas[0.5; 0.5; 0.1];
Factor 5: BetweenFactor(x5,x2)
measured: (5, 0, -1.57079633)
noise model: diagonal sigmas[0.5; 0.5; 0.1];
Initial Values:
Values with 5 values:
Value x1: (N5gtsam5Pose2E) (0.2, -0.3, 0.2)
Value x2: (N5gtsam5Pose2E) (5.1, 0.3, -0.1)
Value x3: (N5gtsam5Pose2E) (9.9, -0.1, -1.77079633)
Value x4: (N5gtsam5Pose2E) (10.2, -5, -3.04159265)
Value x5: (N5gtsam5Pose2E) (5.1, -5.1, 1.47079633)
Initial error: 18.510326
newError: 0.122934358
errorThreshold: 0.122934358 > 0
absoluteDecrease: 18.3873916591 >= 1e-05
relativeDecrease: 0.993358606565 >= 1e-05
newError: 8.85829965247e-06
errorThreshold: 8.85829965247e-06 > 0
absoluteDecrease: 0.12292549938 >= 1e-05
relativeDecrease: 0.999927942848 >= 1e-05
newError: 3.68234845905e-15
errorThreshold: 3.68234845905e-15 > 0
absoluteDecrease: 8.85829964879e-06 < 1e-05
relativeDecrease: 0.999999999584 >= 1e-05
converged
errorThreshold: 3.68234845905e-15 <? 0
absoluteDecrease: 8.85829964879e-06 <? 1e-05
relativeDecrease: 0.999999999584 <? 1e-05
iterations: 3 >? 100
Final Result:
Values with 5 values:
Value x1: (N5gtsam5Pose2E) (-3.17592454561e-18, 5.21439530413e-19, 2.17083859205e-20)
Value x2: (N5gtsam5Pose2E) (5, 7.60341342619e-19, 1.73447953203e-20)
Value x3: (N5gtsam5Pose2E) (10.0000000015, -4.40576430129e-09, -1.5707963267)
Value x4: (N5gtsam5Pose2E) (10.0000000114, -5.00000003139, 3.14159265352)
Value x5: (N5gtsam5Pose2E) (4.99999999784, -5.00000000264, 1.57079632663)
x1 covariance:
1 1.09613818193e-18 -3.52006030097e-17
1.09613818193e-18 1 1.42108547152e-16
-3.52006030097e-17 1.42108547152e-16 0.01
x2 covariance:
1.25 -2.18298661793e-16 -8.8071537939e-17
-2.18298661793e-16 1.5 0.05
-8.8071537939e-17 0.05 0.02
x3 covariance:
2.70000000047 -8.21534004474e-10 -0.155000000029
-8.21533972918e-10 1.45000000006 -0.00499999990562
-0.155000000029 -0.00499999990562 0.0264999999985
x4 covariance:
2.1125000074 0.800000006448 -0.120000000784
0.800000006448 2.80000000387 -0.170000000296
-0.120000000784 -0.170000000296 0.0279999999952
x5 covariance:
1.69999999991 -0.224999999954 0.0449999999659
-0.224999999954 2.06250000049 -0.127500000037
0.0449999999659 -0.127500000037 0.0264999999968
cmakeLists.txt文件:
project(gtsam_test)
cmake_minimum_required(VERSION 2.8)
add_compile_options(-std=c++11)
find_package(Boost COMPONENTS thread filesystem date_time system REQUIRED)
FIND_PACKAGE(GTSAM REQUIRED)
INCLUDE_DIRECTORIES(${Boost_INCLUDE_DIR})
INCLUDE_DIRECTORIES(${GTSAM_INCLUDE_DIR})
INCLUDE_DIRECTORIES("/usr/include/eigen3")
add_executable(test test.cpp)
# 链接库
target_link_libraries(test ${Boost_LIBRARIES} -lgtsam -ltbb)
install(TARGETS test RUNTIME DESTINATION bin)
参考:
1.官方教程:https://gtsam.org/tutorials/intro.html#listing_OdometryOptimize
二、LeGo-LOAM中的因子图优化逻辑
1)系列头文件
#include <gtsam/geometry/Rot3.h>
#include <gtsam/geometry/Pose3.h>
#include <gtsam/slam/PriorFactor.h>
#include <gtsam/slam/BetweenFactor.h>
#include <gtsam/nonlinear/NonlinearFactorGraph.h>
#include <gtsam/nonlinear/LevenbergMarquardtOptimizer.h>
#include <gtsam/nonlinear/Marginals.h>
#include <gtsam/nonlinear/Values.h>
#include <gtsam/nonlinear/ISAM2.h>
2)系列声明与初始化
using namespace gtsam;
NonlinearFactorGraph gtSAMgraph;
Values initialEstimate;
Values optimizedEstimate;
ISAM2 *isam;
Values isamCurrentEstimate;
noiseModel::Diagonal::shared_ptr priorNoise;
noiseModel::Diagonal::shared_ptr odometryNoise;
noiseModel::Diagonal::shared_ptr constraintNoise;
//初始化
ISAM2Params parameters;
parameters.relinearizeThreshold = 0.01;
parameters.relinearizeSkip = 1;
isam = new ISAM2(parameters);
gtsam::Vector Vector6(6);
Vector6 << 1e-6, 1e-6, 1e-6, 1e-8, 1e-8, 1e-6;
priorNoise = noiseModel::Diagonal::Variances(Vector6);
odometryNoise = noiseModel::Diagonal::Variances(Vector6);
3)在回环检测线程中,当找到闭环,就添加回环因子
gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(roll, pitch, yaw), Point3(x, y, z));
gtsam::Pose3 poseTo = pclPointTogtsamPose3(cloudKeyPoses6D->points[closestHistoryFrameID]);
gtsam::Vector Vector6(6);
float noiseScore = icp.getFitnessScore();
Vector6 << noiseScore, noiseScore, noiseScore, noiseScore, noiseScore, noiseScore;
constraintNoise = noiseModel::Diagonal::Variances(Vector6);
/* add constraints*/
std::lock_guard<std::mutex> lock(mtx);
gtSAMgraph.add(BetweenFactor<Pose3>(latestFrameIDLoopCloure, closestHistoryFrameID, poseFrom.between(poseTo), constraintNoise));
isam->update(gtSAMgraph);
isam->update();
gtSAMgraph.resize(0);
4)在保存关键帧和因子中,先是添加固定先验因子
if (cloudKeyPoses3D->points.empty())
{
gtSAMgraph.add(PriorFactor<Pose3>(0, Pose3(Rot3::RzRyRx(transformTobeMapped[2], transformTobeMapped[0], transformTobeMapped[1]),Point3(transformTobeMapped[5], transformTobeMapped[3], transformTobeMapped[4])), priorNoise));
initialEstimate.insert(0, Pose3(Rot3::RzRyRx(transformTobeMapped[2], transformTobeMapped[0], transformTobeMapped[1]),Point3(transformTobeMapped[5], transformTobeMapped[3], transformTobeMapped[4])));
for (int i = 0; i < 6; ++i)
transformLast[i] = transformTobeMapped[i];
}
5)随后添加位姿间的二元因子
else
{
gtsam::Pose3 poseFrom = Pose3(Rot3::RzRyRx(transformLast[2], transformLast[0], transformLast[1]),Point3(transformLast[5], transformLast[3], transformLast[4]));
gtsam::Pose3 poseTo = Pose3(Rot3::RzRyRx(transformAftMapped[2], transformAftMapped[0], transformAftMapped[1]),Point3(transformAftMapped[5], transformAftMapped[3], transformAftMapped[4]));
gtSAMgraph.add(BetweenFactor<Pose3>(cloudKeyPoses3D->points.size()-1, cloudKeyPoses3D->points.size(), poseFrom.between(poseTo), odometryNoise));
initialEstimate.insert(cloudKeyPoses3D->points.size(), Pose3(Rot3::RzRyRx(transformAftMapped[2], transformAftMapped[0], transformAftMapped[1]),Point3(transformAftMapped[5], transformAftMapped[3], transformAftMapped[4])));
}
6)更新isam和计算位姿
/*** update iSAM*/
isam->update(gtSAMgraph, initialEstimate);
isam->update();
gtSAMgraph.resize(0);
initialEstimate.clear();
/** save key poses*/
PointType thisPose3D;
PointTypePose thisPose6D;
Pose3 latestEstimate;
isamCurrentEstimate = isam->calculateEstimate();//计算出最终矫正后结果存放的地方
7)访问最终矫正后的位姿
int numPoses = isamCurrentEstimate.size();
for (int i = 0; i < numPoses; ++i)
{
cloudKeyPoses3D->points[i].x = isamCurrentEstimate.at<Pose3>(i).translation().y();
cloudKeyPoses3D->points[i].y = isamCurrentEstimate.at<Pose3>(i).translation().z();
cloudKeyPoses3D->points[i].z = isamCurrentEstimate.at<Pose3>(i).translation().x();
cloudKeyPoses6D->points[i].x = cloudKeyPoses3D->points[i].x;
cloudKeyPoses6D->points[i].y = cloudKeyPoses3D->points[i].y;
cloudKeyPoses6D->points[i].z = cloudKeyPoses3D->points[i].z;
cloudKeyPoses6D->points[i].roll = isamCurrentEstimate.at<Pose3>(i).rotation().pitch();
cloudKeyPoses6D->points[i].pitch = isamCurrentEstimate.at<Pose3>(i).rotation().yaw();
cloudKeyPoses6D->points[i].yaw = isamCurrentEstimate.at<Pose3>(i).rotation().roll();
}