A*算法是在Dijkstra算法上进行改进,毕竟,我们是知道终点和起点的位置信息的,Dijkstra算法完全是四面八方全都找,然而我们既然已经知道,比方说重点在起点的北方,那么完全可以直接往北方搜索。
所以算法综合了Best-First Search和Dijkstra算法的优点:在进行启发式搜索提高算法效率的同时,可以保证找到一条最优路径(基于评估函数)。
在此算法中,如果以g(n)表示从起点到任意顶点n的实际距离,h(n)表示任意顶点n到目标顶点的估算距离(根据所采用的评估函数的不同而变化),那么A*算法的估算函数为:
f
(
x
)
=
g
(
x
)
+
h
(
x
)
- 如果g(n)为0,即只计算任意顶点 n到目标的评估函数 h(n),而不计算起点到顶点n的距离,则算法转化为使用贪心策略的Best-First Search,速度最快,但可能得不出最优解;
- 如果h(n)不高于实际到目标顶点的距离,则一定可以求出最优解,而且h(n)越小,需要计算的节点越多,算法效率越低,常见的评估函数有——欧几里得距离、曼哈顿距离、切比雪夫距离;
-
如果h(n)为0,即只需求出起点到任意顶点n的最短路径 g(n),而不计算任何评估函数h(n),则转化为单源最短路径问题,即Dijkstra算法,此时需要计算最多的定点;
-
4方向用
L
1
距离 -
8方向用
L
∞
距离,也就是max -
任意方向用
L
2
距离
heuristic function
这个评估函数,其实就是给搜索算法一个知识,告诉搜索算法往哪个方向比较对。
评估函数有这么几个特性:
-
将每一个节点映射到非负实数
H
:
n
o
d
e
→
{
x
|
x
≥
0
,
x
∈
R
}
-
H
(
g
o
a
l
)
=
0
-
对任意两个相邻的节点
x
,
y
-
H
(
x
)
≤
H
(
y
)
+
d
(
x
,
y
)
-
d
(
x
,
y
)
=
w
e
i
g
h
t
h
e
i
g
h
t
of edge from
x
to
y
-
这些属性可以令:
∀
n
,
H
(
n
)
≤
s
h
o
r
t
e
s
t
p
a
t
h
f
r
o
m
n
t
o
g
o
a
l
关于H函数:
http://theory.stanford.edu/~amitp/GameProgramming/Heuristics.html
伪代码
-
对于每一个node n
- n.f = Infinity, n.g = Infinity
- 创建一个空的List
- start.g = 0, start.f = H(start),将start加入到list里边
-
While(List非空)
- current = list中最小f值的那个node
- 如果current == goal,那么就完成啦
- 对每一个node, n是这个node的临近的节点
-
if(n.g > (current.g + cost of edge from n to current))
- n.g = current.g + cost of edge from n to current
- n.f = n.g + H(n)
- n.parent = current
- add n to list if it’s not there already
matlab代码
function [route,numExpanded] = AStarGrid (input_map, start_coords, dest_coords, drawMapEveryTime)
% Run A* algorithm on a grid.
% Inputs :
% input_map : a logical array where the freespace cells are false or 0 and
% the obstacles are true or 1
% start_coords and dest_coords : Coordinates of the start and end cell
% respectively, the first entry is the row and the second the column.
% Output :
% route : An array containing the linear indices of the cells along the
% shortest route from start to dest or an empty array if there is no
% route. This is a single dimensional vector
% numExpanded: Remember to also return the total number of nodes
% expanded during your search. Do not count the goal node as an expanded node.
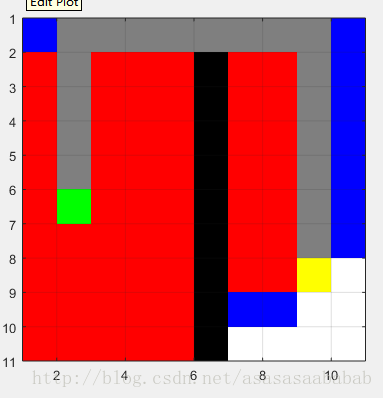
% set up color map for display
% 1 - white - clear cell
% 2 - black - obstacle
% 3 - red = visited
% 4 - blue - on list
% 5 - green - start
% 6 - yellow - destination
cmap = [1 1 1; ...
0 0 0; ...
1 0 0; ...
0 0 1; ...
0 1 0; ...
1 1 0; ...
0.5 0.5 0.5];
colormap(cmap);
% variable to control if the map is being visualized on every
% iteration
drawMapEveryTime = true;
[nrows, ncols] = size(input_map);
% map - a table that keeps track of the state of each grid cell
map = zeros(nrows,ncols);
map(~input_map) = 1; % Mark free cells
map(input_map) = 2; % Mark obstacle cells
% Generate linear indices of start and dest nodes
start_node = sub2ind(size(map), start_coords(1), start_coords(2));
dest_node = sub2ind(size(map), dest_coords(1), dest_coords(2));
map(start_node) = 5;
map(dest_node) = 6;
% meshgrid will `replicate grid vectors' nrows and ncols to produce
% a full grid
% type `help meshgrid' in the Matlab command prompt for more information
parent = zeros(nrows,ncols);
%
[X, Y] = meshgrid (1:ncols, 1:nrows);
xd = dest_coords(1);
yd = dest_coords(2);
% Evaluate Heuristic function, H, for each grid cell
% Manhattan distance
H = abs(X - xd) + abs(Y - yd);
H = H';
% Initialize cost arrays
f = Inf(nrows,ncols);
g = Inf(nrows,ncols);
g(start_node) = 0;
f(start_node) = H(start_node);
% keep track of the number of nodes that are expanded
numExpanded = 0;
% Main Loop
while true
% Draw current map
map(start_node) = 5;
map(dest_node) = 6;
% make drawMapEveryTime = true if you want to see how the
% nodes are expanded on the grid.
if (drawMapEveryTime)
image(1.5, 1.5, map);
grid on;
axis image;
drawnow;
end
% Find the node with the minimum f value
[min_f, current] = min(f(:));
if ((current == dest_node) || isinf(min_f))
break;
end;
% Update input_map
map(current) = 3;
f(current) = Inf; % remove this node from further consideration
% Compute row, column coordinates of current node
[i, j] = ind2sub(size(f), current);
% *********************************************************************
% ALL YOUR CODE BETWEEN THESE LINES OF STARS
% Visit all of the neighbors around the current node and update the
% entries in the map, f, g and parent arrays
%
numExpanded = numExpanded + 1;
if(i-1>=1) %upper
id = sub2ind(size(map), i-1, j);
if((map(id) ~= 2) ... %if not obst
&& (map(id) ~= 3) ... % if not visited
&& (map(id) ~= 5)) ... % if not start
if(g(id) >= g(current) + 1)
g(id) = g(current) + 1;
f(id) = g(id) + H(id);
parent(id) = current;
map(id) = 4;
end
end
end
if(i+1 <= nrows) %lower
id = sub2ind(size(map), i+1, j);
if((map(id) ~= 2) ... %if not obst
&& (map(id) ~= 3) ... % if not visited
&& (map(id) ~= 5)) ... % if not start
if(g(id) >= g(current) + 1)
g(id) = g(current) + 1;
f(id) = g(id) + H(id);
parent(id) = current;
map(id) = 4;
end
end
end
if(j-1 >= 1) %left
id = sub2ind(size(map), i, j-1);
if((map(id) ~= 2) ... %if not obst
&& (map(id) ~= 3) ... % if not visited
&& (map(id) ~= 5)) ... % if not start
if(g(id) >= g(current) + 1)
g(id) = g(current) + 1;
f(id) = g(id) + H(id);
parent(id) = current;
map(id) = 4;
end
end
end
if(j+1 <= ncols) %left
id = sub2ind(size(map), i, j+1);
if((map(id) ~= 2) ... %if not obst
&& (map(id) ~= 3) ... % if not visited
&& (map(id) ~= 5)) ... % if not start
if(g(id) >= g(current) + 1)
g(id) = g(current) + 1;
f(id) = g(id) + H(id);
parent(id) = current;
map(id) = 4;
end
end
end
%*********************************************************************
end
%% Construct route from start to dest by following the parent links
if (isinf(f(dest_node)))
route = [];
else
route = [dest_node];
while (parent(route(1)) ~= 0)
route = [parent(route(1)), route];
end
% Snippet of code used to visualize the map and the path
for k = 2:length(route) - 1
map(route(k)) = 7;
pause(0.1);
image(1.5, 1.5, map);
grid on;
axis image;
end
end
end
测试代码
map = false(10); %Input map parameters
map (2:10, 6) = true; %Obstacle Declaration
start_coords = [6, 2]; %Starting coordinates
dest_coords = [8, 9]; %Destination Coordinates
drawMapEveryTime = false; %Display Outputs
[route, numExpanded] = AStarGrid(map, start_coords, dest_coords,drawMapEveryTime) %Implementatio
结果: