文章目录
轨迹:时间、位置、速度、加速度
给定时间0-2s,位置0-3
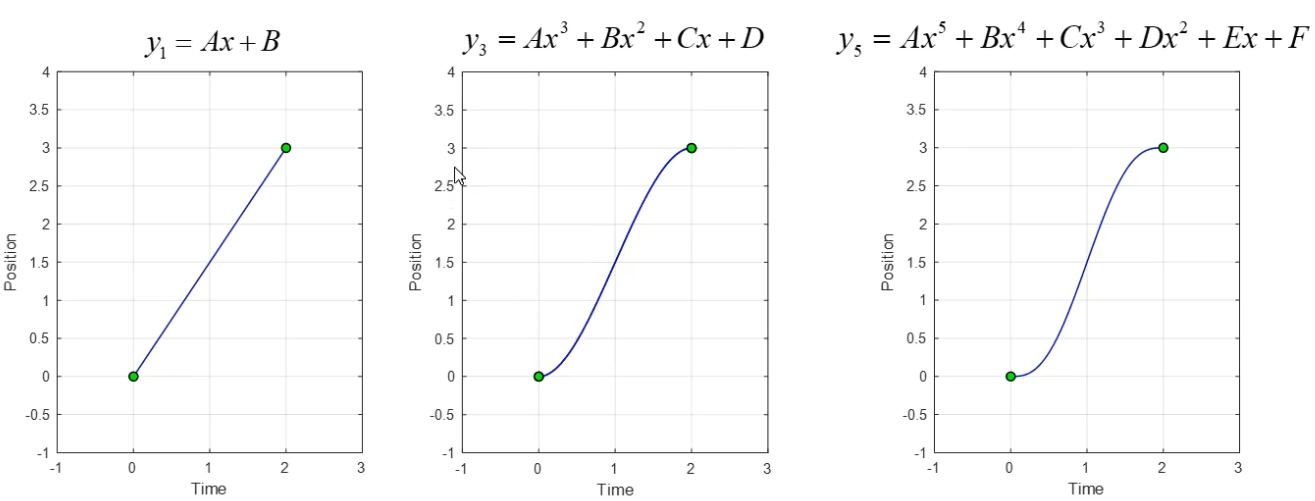
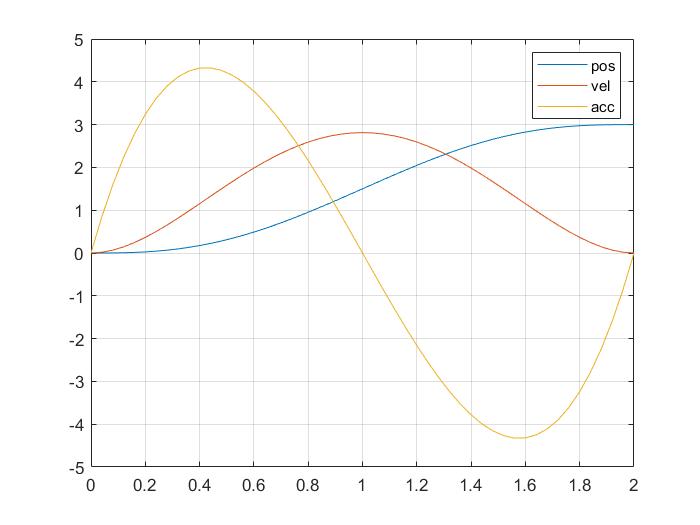
五次多项式轨迹:
tpoly()
tpoly()
[S,SD,SDD] = tpoly(S0, SF, T, QD0, QD1)
S0:初始位置
SF:结束位置
T:时间序列
QD0:初始速度
QD1:结束速度
t = linspace(0,2,51); %// 时间 0:0.04:2
[P,dP,ddP] = tpoly(0,3,t); %// 位置,速度,加速度
plot(t,P);grid on;hold on;plot(t,dP);hold on;plot(t,ddP);legend('pos','vel','acc')
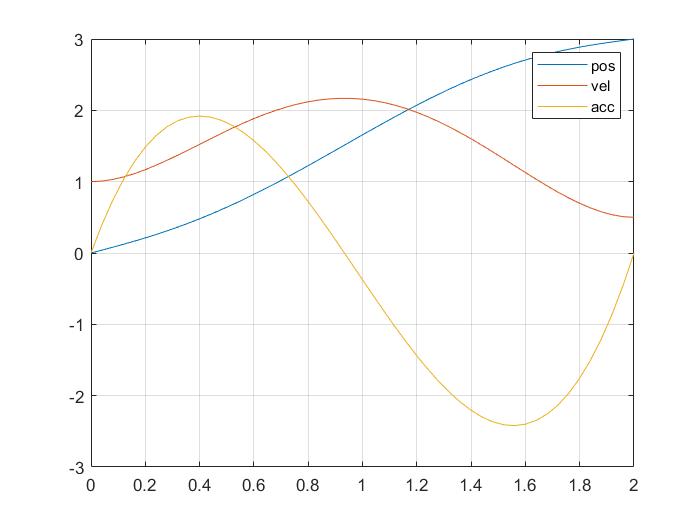
% //指定初末速度
[P,dP,ddP] = tpoly(0,3,t,0.01,0.05); % //位置,速度,加速度,初始速度末尾速度默认0
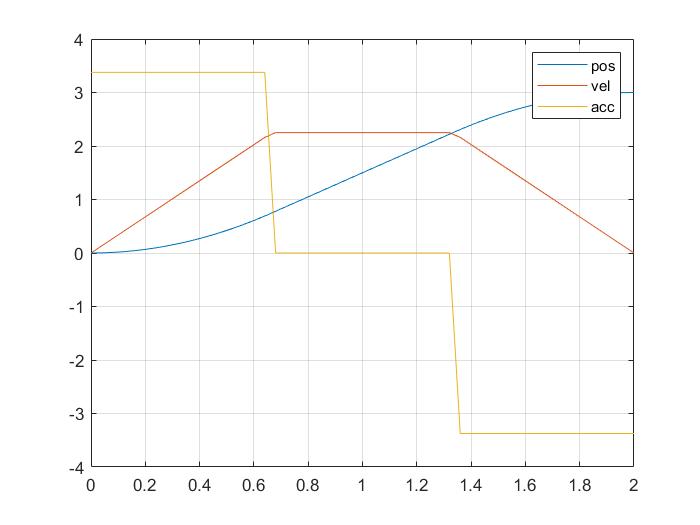
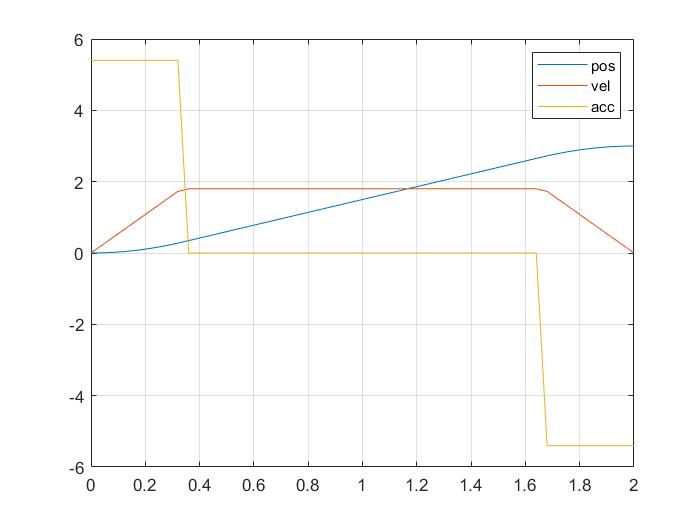
混合曲线轨迹:
lspb()
lspb()
[S,SD,SDD] = lspb(S0, SF, T, V)
S0:初始位置
SF:结束位置
T:时间序列
V:最大速度
t = linspace(0,2,51); % //时间 0:0.04:2
[P,dP,ddP] = lspb(0,3,t); % //位置,速度,加速度
plot(t,P);grid on;hold on;plot(t,dP);hold on;plot(t,ddP);legend('pos','vel','acc')
% //指定最大速度
[P,dP,ddP] = lspb(0,3,t,1.8); % //位置,速度,加速度,最大速度
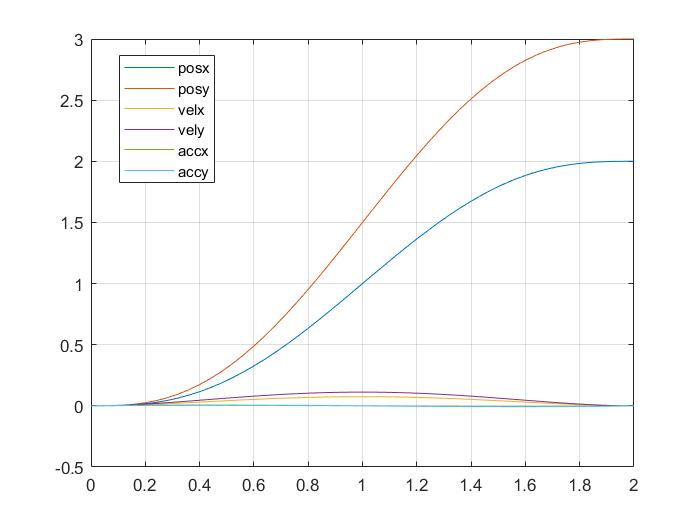
多维轨迹:
mtraj()
mtraj()
[Q,QD,QDD] = mtraj(TFUNC, Q0, QF, T)
TFUNC:轨迹函数,可选@tpoly或@lspb
Q0:初始位置
QF:结束位置
T:时间序列
t = linspace(0,2,51); %// 时间 0:0.04:2
[P,dP,ddP] = mtraj(@tpoly,[0,0],[2,3],t);
figure(1) % //画在同一个坐标系下
plot(t,P(:,1));grid on;hold on;plot(t,P(:,2));hold on;
plot(t,dP(:,1));grid on;hold on;plot(t,dP(:,2));hold on;
plot(t,ddP(:,1));grid on;hold on;plot(t,ddP(:,2));hold on;
legend('posx','posy','velx','vely','accx','accy')
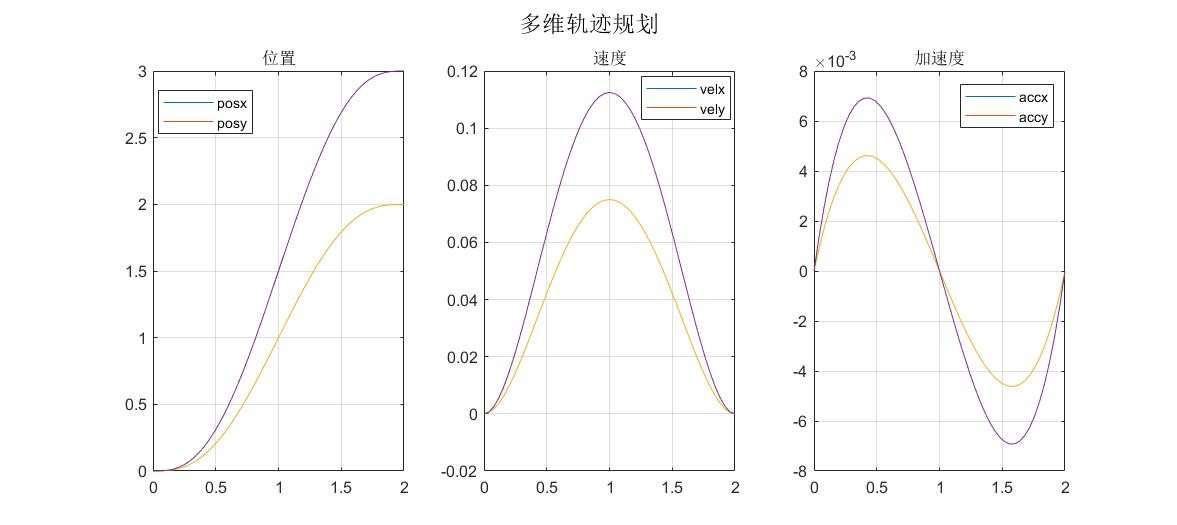
figure(2) %// 绘制在同一个图窗的三个坐标系下
sgtitle('多维轨迹规划') % sgtitleg
subplot(1,3,1);plot(t,P(:,1));grid on;hold on;plot(t,P(:,2));hold on;
title('位置');legend('posx','posy')
subplot(1,3,2);plot(t,dP(:,1));grid on;hold on;plot(t,dP(:,2));hold on;
title('速度');legend('velx','vely')
subplot(1,3,3);plot(t,ddP(:,1));grid on;hold on;plot(t,ddP(:,2));hold on;
title("加速度");legend('accx','accy')
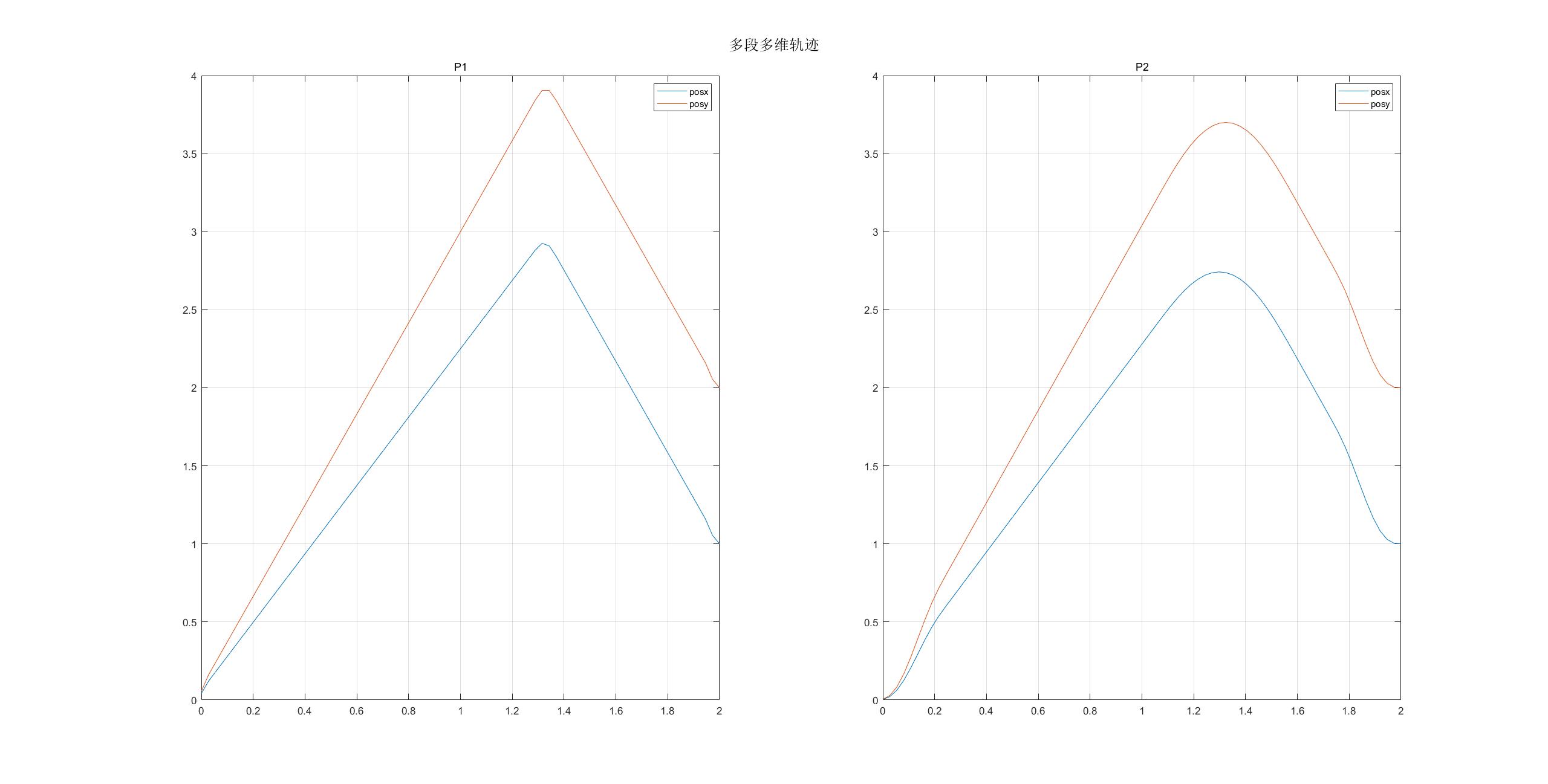
多段多维轨迹:
mstraj()
mstraj()
TRAJ=mstraj(WP,QDMAX,TSEG,QO,DT,TACC,OPTIONS)
WP:路径点
QDMAX:最大速度,和TSEG为同一个自由度,若设置了时间间隔,则最大速度置空。
TSEG:每段的时间间隔,和QDMAX为同一个自由度,若设置了最大速度,则时间间隔置空。
QO:初始位置,置为空时,WP第一个点必须为[0,0]
DT:插值间隔
TACC:加速时间
OPTIONS:
wp=[0,0;3,4;1,2];
t=0.04; % //时间间隔
P1=mstraj(wp,[],[2,1],[],t,0.1);
P2=mstraj(wp,[],[2,1],[],t,0.8);
figure(1) % //绘制在同一个图窗的三个坐标系下
sgtitle('多段多维轨迹') % //sgtitleg
subplot(1,2,1);
plot(linspace(0,t*length(P1(:,1)),length(P1(:,1))),P1(:,1));
grid on;hold on;
plot(linspace(0,t*length(P1(:,1)),length(P1(:,1))),P1(:,2));
hold on;
title('P1');legend('posx','posy')
subplot(1,2,2);
plot(linspace(0,t*length(P2(:,1)),length(P2(:,1))),P2(:,1));
grid on;hold on;
plot(linspace(0,t*length(P2(:,1)),length(P2(:,1))),P2(:,2));
hold on;
title('P2');legend('posx','posy')
版权声明:本文为weixin_47370211原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。