来源:专知
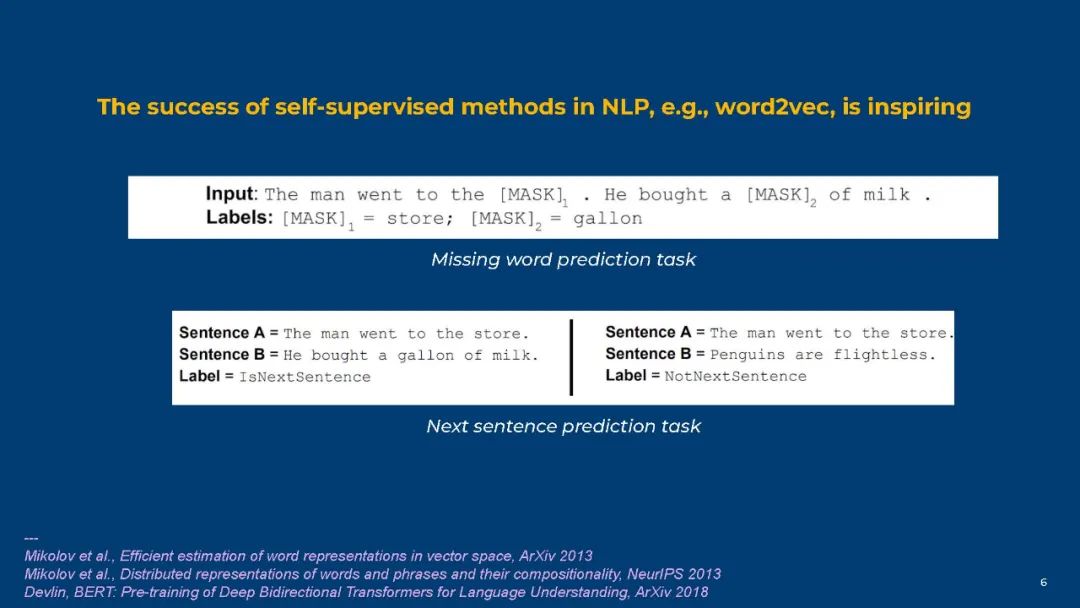
本文为教程介绍,建议阅读5分钟自监督学习(SSL)作为一种有前途的研究方向出现,通过使用从数据本身提取的各种监督信号训练模型,而不需要任何人工生成的标签,来缓解这一差距。
基于深度学习的图像理解方法的巨大进展为自主系统提供了新的高级感知功能。然而,现实世界的视觉应用通常需要模型,可以从大量未标记和未策划的数据中学习,只有少量标记样本,通常选择和注释成本很高。
相比之下,典型的监督方法需要大量精心选择的标记数据,而在实际应用中很少满足这一条件。自监督学习(SSL)作为一种有前途的研究方向出现,通过使用从数据本身提取的各种监督信号训练模型,而不需要任何人工生成的标签,来缓解这一差距。
https://gidariss.github.io/ssl-on-wheels-eccv2022/
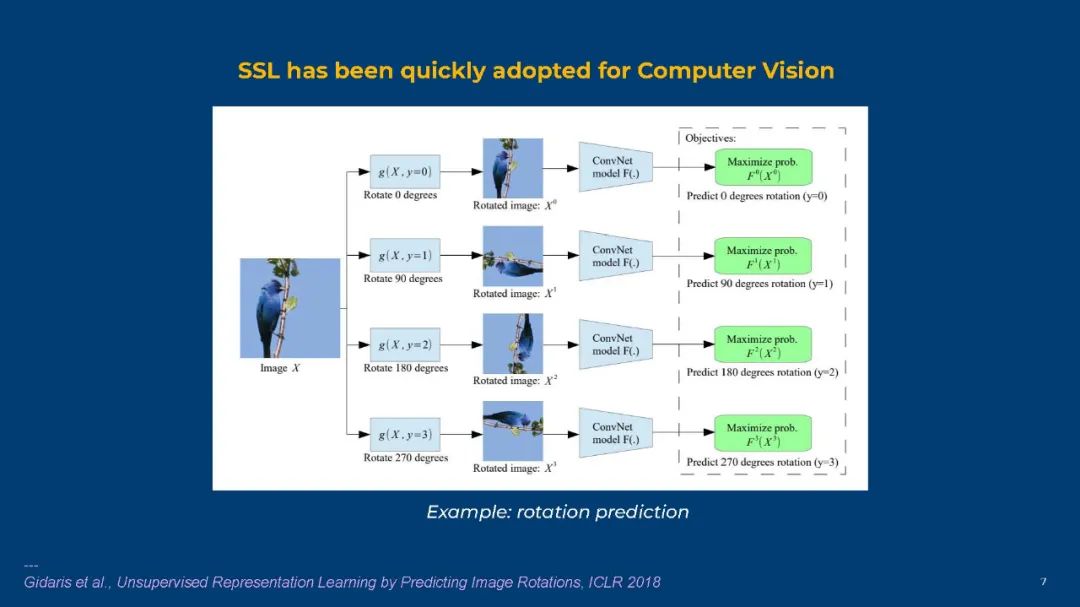
SSL在过去两年中取得了许多令人兴奋的进展,许多新的SSL方法设法达到甚至超过完全监督技术的性能。
虽然最流行的SSL方法围绕着ImageNet等网络图像数据集,但也对自动驾驶(AD)的新多样的自监督形式进行了研究。AD代表了SSL方法的一个独特沙箱,因为它带来了社区中最大的公共数据集合,并提供了一些最具挑战性的计算机视觉任务:目标检测、深度估计、基于图像的里程测量和定位等。在这里,规范的SSL通道(即自监督预训练模型并在下游任务上对其进行调优)被重新访问和扩展,以学习地面真相注释难以计算的任务(例如,密集深度),从而为计算机视觉和机器人技术带来全新的SSL方法。在本教程中,我们将通过AD的基本感知任务的镜头,深入介绍自我监督学习的各种范式(旧的和新的)。具体来说,本教程将涵盖以下主题:(1)从自动驾驶数据中进行自我监督表示学习,(2)深度估计的自监督学习,(3)三维检测和跟踪的自监督学习,(4)里程数测量和定位的自监督学习。
目录内容: