1.什么是openwrt
2.ubus介绍
ubus为openwrt平台开发中的进程间通信提供了一个通用的框架。 它让进程间通信的实现变得非常简单,并且ubus具有很强的可移植性,可以很方便的移植到其他linux平台上使用。 本文描述了ubus的实现原理和整体框架。
ubus源码可通过Git库 git://nbd.name/luci2/ubus.git 获得, 其依赖的ubox库的git库:git://nbd.name/luci2/ubox.git。
3.ubus的实现框架
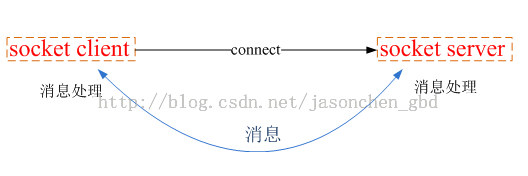
ubus实现的基础是unix socket,即本地socket,它相对于用于网络通信的inet socket 更高效,更具可靠性。unix socket客户端和服务器的实现方式和网络socket类似,读者如果还不太熟悉可查阅相关资料。
要实现一个简单的unix socket服务器和客户端需要做如下工作:
1.建立一个socket server端,绑定到一个本地socket文件,并监听clients的连接。
2.建立一个或多个socket。
3.client端,连接server。 client和server相互发送消息。
4.client或server收到对方消息后,针对具体消息进行相应处理。
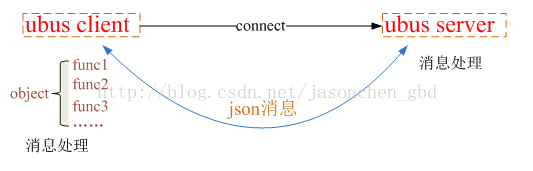
ubus中同样实现了上述组件,并对socket连接以及消息传输和处理进行了封装:
1. ubus提供了一个socket server:ubusd。因此开发者不需要自己实现server端。
2. ubus提供了创建socketclient端的接口,并且提供了三种现成的客户端供用户直接使用:
1、为shell脚本提供的client端。
2、为lua脚本提供的client接口。
3、为C语言提供的client接口。
ubus对shell和lua增加了支持。
3. ubus对client和server之间通信的消息格式进行了定义:client和server都必须将消息封装成json消息格式。
4. ubus对client端的消息处理抽象出“对象(object)”和“方法(method)”的概念。一个对象中包含多个方法,client需要向server注册收到特定json消息时的处理方法。对象和方法都有自己的名字,发送请求方只需在消息中指定要调用的对象和方法的名字即可
。
使用ubus时需要引用一些动态库,主要包括:
1. libubus.so:ubus向外部提供的编程接口,例如创建socket,进行监听和连接,发送消息等接口函数。
2. libubox.so:ubus向外部提供的编程接口,例如等待和读取消息。
3. libblobmsg.so,libjson.so:提供了封装和解析json数据的接口,编程时不需要直接使用libjson.so,而是使用libblobmsg.so提供的更灵活的接口函数。
ubus中各组件的关系如下图:
4.ubus的实现原理
下面以一个例子说明ubus的工作原理:
下图中,client2试图通过ubus修改ip地址,而修改ip地址的函数在client1中定义。
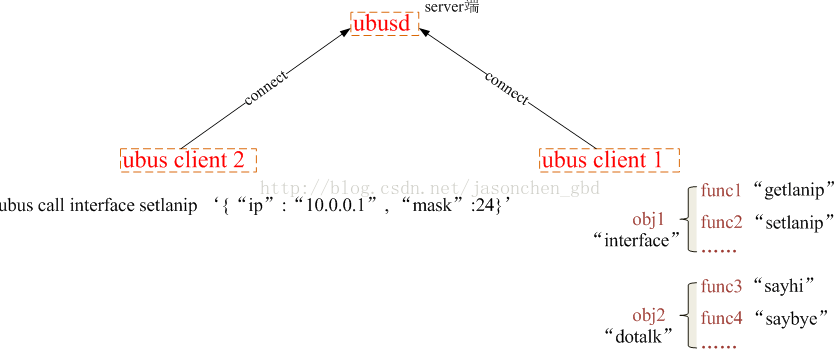
client2进行请求的整个过程为:
1. client1向ubusd注册了两个对象:“interface”和“dotalk”,其中“interface”对象中注册了两个method:“getlanip”和“setlanip”,对应的处理函数分别为func1()和func2()。“dotalk”对象中注册了两个method:“sayhi”和“saybye”,对应的处理函数分别为func3()和func4()。
2. 接着创建一个client2用来与client1通信,注意,两个client之间不能直接通信,需要经ubusd(server)中转。
3. client2就是在前面讲到的shell/lua/C客户端。假设这里使用shell客户端,在终端输入以下命令:ubus call interface setlanip ‘{“ip”:“10.0.0.1”, “mask”:24}’
4. 消息发到server后,server根据对象名找到应该将请求转发给client1,然后将消息发送到client1,client1进而调用func2()接受参数并处理,如果处理完成后需要回复client2,则发送回复消息。

5. ubus的应用场景和局限性
ubus可用于两个进程之间的通信,并以类似json格式进行数据交互。ubus的常见场景为:
1. "客户端–服务器"形式的交互,即进程A注册一系列的服务,进程B去调用这些服务。
2. ubus支持以"订阅 —通知"的方式进行进程通信,即进程A提供订阅服务,其他进程可以选择订阅或退订该服务,进程A可以向所有订阅者发送消息。
由于ubus实现方式的限制,在一些场景中不适宜使用ubus:
1. ubus用于少量数据的传输,如果数据量很大或是数据交互很频繁,则不宜用ubus。经过测试,当ubus一次传输数据量超过60KB,就不能正常工作了。
2. ubus对多线程支持的不好,例如在多个线程中去请求同一个服务,就有可能出现不可预知的结果。
3. 不建议递归调用ubus,例如进程A去调用进程B的服务,而B的该服务需要调用进程C的服务,之后C将结果返回给B,然后B将结果返回给A。如果不得不这样做,需要在调用过程中避免全局变量的重用问题。
6.ubus源码简析
下面介绍一下ubusd和ubus client工作时的代码流程,这里为了便于理解,只介绍大致的流程, 欲了解详细的实现请读者自行阅读源码。
ubusd工作流程
ubusd 的初始化所做的工作如下:
1. epoll_create(32)创建出一个poll_fd。
2. 创建一个UDP unix socket,并添加到poll_fd的监听队列。
3. 进行epoll_wait()等待消息。收到消息后的处理函数定义如下:
static struct uloop_fd server_fd= {
.cb = server_cb,
};
即调用server_cb()函数。
1.server_cb()函数中的工作为:
1. 进行accept(),接受client连接,并为该连接生成一个client_fd。
2. 为client分配一个clientid,用于ubusd区分不同的client。
3. 向client发送一个HELLO消息作为连接建立的标志。
4. 将client_fd添加到poll_fd的监听队列中,用于监听client发过来的消息,消息处理函数为client_cb()。
也就是说ubusd监听两种消息,一种是新client的连接请求,一种是现有的每个client发过来的数据。
当ubusd收到一个client的数据后,调用client_cb()函数的处理过程:
- 先检查一下是否有需要向这个client回复的数据(可能是上一次请求没处理完),如果有,先发送这些遗留数据。
- 读取socket上的数据,根据消息类型(数据中都指定了消息类型的)调用相应的处理函数,消息类型和处理函数定义如下:
static const ubus_cmd_cb handlers[__UBUS_MSG_LAST] = {
[UBUS_MSG_PING] = ubusd_send_pong,
[UBUS_MSG_ADD_OBJECT] = ubusd_handle_add_object,
[UBUS_MSG_REMOVE_OBJECT] = ubusd_handle_remove_object,
[UBUS_MSG_LOOKUP] = ubusd_handle_lookup,
[UBUS_MSG_INVOKE] = ubusd_handle_invoke,
[UBUS_MSG_STATUS] = ubusd_handle_response,
[UBUS_MSG_DATA] = ubusd_handle_response,
[UBUS_MSG_SUBSCRIBE] = ubusd_handle_add_watch,
[UBUS_MSG_UNSUBSCRIBE] = ubusd_handle_remove_watch,
[UBUS_MSG_NOTIFY] = ubusd_handle_notify,
};
例如,如果收到invoke消息,就调用ubusd_handle_invoke()函数处理。 这些处理函数可能是ubusd处理完后需要回发给client数据,或者是将消息转发给另一个client (如果发送请求的client需要和另一个client进行通信)。
处理完成后,向client发送处理结果,例如UBUS_STATUS_OK。(注意,client发送数据是UBUS_MSG_DATA类型的)
client的工作流程
ubus call obj method的工作流程:
1. 创建一个unix socket(UDP)连接ubusd,并接收到server发过来的HELLO消息。
2. ubus call命令由ubus_cli_call()函数进行处理,先向ubusd发送lookup消息请求obj的id。然后向ubusd发送invoke消息来调用obj的method方法。
3. 创建epoll_fd并将client的fd添加到监听列表中等待消息。
4. client收到消息后的处理函数为ubus_handle_data(),其中UBUS_MSG_DATA类型的数据 receive_call_result_data()函数协助解析。
被call的client的工作流程:
和ubus客户端的流程相似,只是变成了接受请求并调用处理函数。