前言
今天学习雷达信号处理时,发现一个已调信号的形式比较特别。
s
(
t
)
=
a
(
t
)
c
o
s
[
2
π
f
0
t
+
ϕ
(
t
)
]
s(t) = a(t)cos[2{\pi}f_0t+{\phi}(t)]
s
(
t
)
=
a
(
t
)
cos
[
2
π
f
0
t
+
ϕ
(
t
)]
在网上找也没有找到详细推导,下面来探讨这个公式是怎么来的。下面的推导仅靠个人理解推导,欢迎大家指出错误。
一、传统的调制
传统的调制就是直接将调制信号与载波进行相乘。设调制信号为
f
(
t
)
=
a
(
t
)
c
o
s
(
ϕ
(
t
)
)
f(t) = a(t)cos({\phi}(t))
f
(
t
)
=
a
(
t
)
cos
(
ϕ
(
t
))
其中
a
(
t
)
a(t)
a
(
t
)
为为信号包络,
ϕ
(
t
)
{\phi(t)}
ϕ
(
t
)
为信号相位,有
ϕ
(
t
)
=
ω
t
+
ϕ
n
(
t
)
{\phi}(t) = {\omega}t+{\phi}_n(t)
ϕ
(
t
)
=
ω
t
+
ϕ
n
(
t
)
设载波信号
c
(
t
)
=
c
o
s
(
2
π
f
c
t
)
c(t) = cos(2{\pi}f_ct)
c
(
t
)
=
cos
(
2
π
f
c
t
)
,那么已调信号
s
(
t
)
s(t)
s
(
t
)
为
s
(
t
)
=
a
(
t
)
c
o
s
(
ϕ
(
t
)
)
∙
c
o
s
(
2
π
f
c
t
)
s(t) = a(t)cos({\phi}(t)){\bullet} cos(2{\pi}f_ct)
s
(
t
)
=
a
(
t
)
cos
(
ϕ
(
t
))
∙
cos
(
2
π
f
c
t
)
即
s
(
t
)
=
a
(
t
)
2
{
c
o
s
(
2
π
f
c
t
−
ϕ
(
t
)
)
+
c
o
s
(
2
π
f
c
t
+
ϕ
(
t
)
)
}
s(t) = {\frac{a(t)}{2}}{\{}cos(2{\pi}f_ct-{\phi}(t))+cos(2{\pi}f_ct+{\phi}(t)){\}}
s
(
t
)
=
2
a
(
t
)
{
cos
(
2
π
f
c
t
−
ϕ
(
t
))
+
cos
(
2
π
f
c
t
+
ϕ
(
t
))
}
我们应当只需要后半部分,即前面哪一项应当舍去。一般来说是通过滤波器来做的,当
ϕ
(
t
)
{\phi}(t)
ϕ
(
t
)
的频率较大才能取得较好的效果,否则很难滤除掉。那么怎么得到
s
(
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
s(t) = a(t)cos[2{\pi}f_ct+{\phi}(t)]
s
(
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
这种形式呢,可以使用IQ调制
二、IQ调制
将
s
(
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
s(t) = a(t)cos[2{\pi}f_ct+{\phi}(t)]
s
(
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
展开,有
s
(
t
)
=
a
(
t
)
c
o
s
(
2
π
f
c
t
)
⋅
c
o
s
ϕ
(
t
)
−
a
(
t
)
s
i
n
(
2
π
f
0
t
)
⋅
s
i
n
ϕ
(
t
)
s(t) = a(t)cos(2{\pi}f_ct){\cdot}cos{\phi}(t)-a(t)sin(2{\pi}f_0t){\cdot}sin{\phi}(t)
s
(
t
)
=
a
(
t
)
cos
(
2
π
f
c
t
)
⋅
cos
ϕ
(
t
)
−
a
(
t
)
s
in
(
2
π
f
0
t
)
⋅
s
in
ϕ
(
t
)
而
c
o
s
cos
cos
和
s
i
n
sin
s
in
是可以通过移相90度进行相互转换的。写为IQ两路,有
s
I
(
t
)
=
a
(
t
)
c
o
s
ϕ
(
t
)
s
Q
(
t
)
=
a
(
t
)
s
i
n
ϕ
(
t
)
s_I(t) = a(t)cos{\phi}(t)\\ s_Q(t) = a(t)sin{\phi}(t)
s
I
(
t
)
=
a
(
t
)
cos
ϕ
(
t
)
s
Q
(
t
)
=
a
(
t
)
s
in
ϕ
(
t
)
Q
Q
Q
通道为
I
I
I
通道移相90度。有
s
(
t
)
=
s
I
(
t
)
c
o
s
(
2
π
f
c
t
)
−
s
Q
(
t
)
s
i
n
(
2
π
f
0
t
)
s(t) = s_I(t)cos(2{\pi}f_ct)-s_Q(t)sin(2{\pi}f_0t)
s
(
t
)
=
s
I
(
t
)
cos
(
2
π
f
c
t
)
−
s
Q
(
t
)
s
in
(
2
π
f
0
t
)
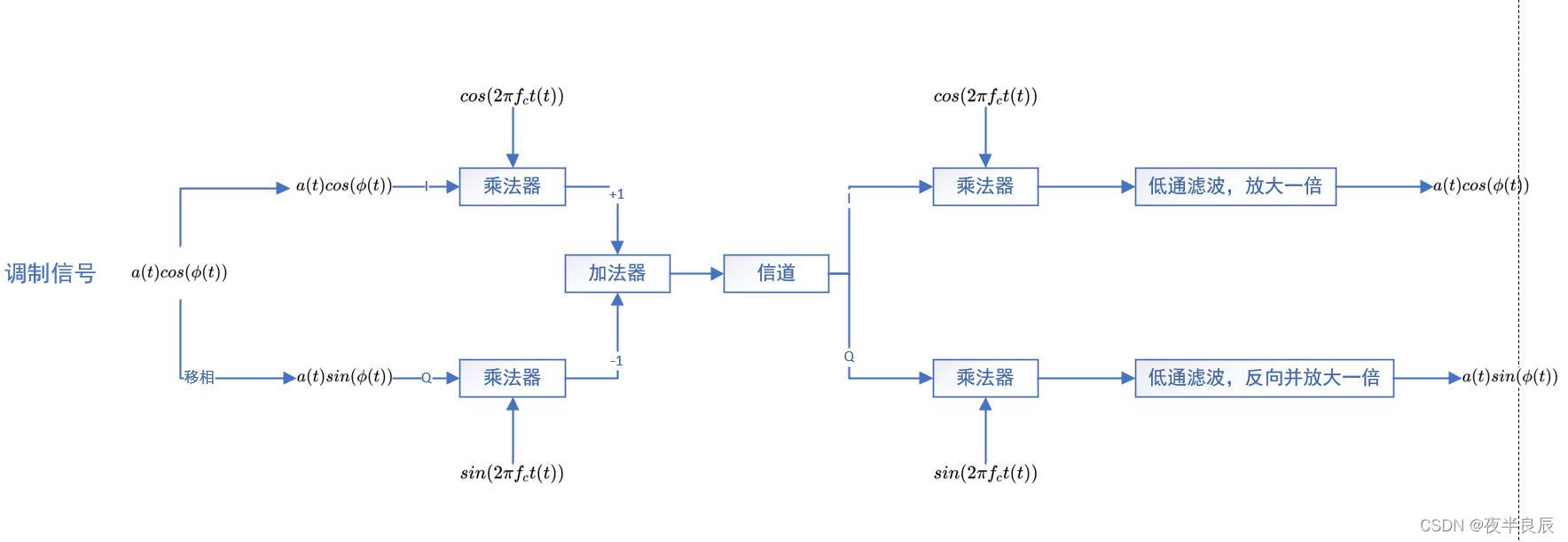
上式完全可以理解成没有移相的调制信号
s
i
(
t
)
s_i(t)
s
i
(
t
)
与没有移相的载波
c
o
s
(
2
π
f
c
t
)
cos(2{\pi}f_ct)
cos
(
2
π
f
c
t
)
进行相乘,然后与移相后的调制信号
s
Q
(
t
)
s_Q(t)
s
Q
(
t
)
与移相后的载波
s
i
n
(
2
π
f
c
t
)
sin(2{\pi}f_ct)
s
in
(
2
π
f
c
t
)
进行相乘后的结果进行相减。
经过这样调制之后,那么就得到了
s
(
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
s(t) = a(t)cos[2{\pi}f_ct+{\phi}(t)]
s
(
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
这种形式。
三、IQ解调
解调也是分为IQ两路进行解调。首先是与没有移向的载波信号
c
o
s
(
2
π
f
c
t
)
cos(2{\pi}f_ct)
cos
(
2
π
f
c
t
)
进行相乘,即
I
I
I
通道解调,设输出为
y
I
(
t
)
y_I(t)
y
I
(
t
)
,有
y
I
(
t
)
=
s
(
t
)
c
o
s
(
2
π
f
c
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
c
o
s
(
2
π
f
c
t
)
y_I(t) = s(t)cos(2{\pi}f_ct)= a(t)cos[2{\pi}f_ct+{\phi}(t)]cos(2{\pi}f_ct)
y
I
(
t
)
=
s
(
t
)
cos
(
2
π
f
c
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
cos
(
2
π
f
c
t
)
有
y
I
(
t
)
=
s
(
t
)
c
o
s
(
2
π
f
c
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
c
o
s
(
2
π
f
c
t
)
y
I
(
t
)
=
a
(
t
)
2
{
c
o
s
(
4
π
f
c
t
+
ϕ
(
t
)
)
+
c
o
s
(
ϕ
(
t
)
)
}
y_I(t) = s(t)cos(2{\pi}f_ct)= a(t)cos[2{\pi}f_ct+{\phi}(t)]cos(2{\pi}f_ct)\\ y_I(t) = {\frac{a(t)}{2}}{\{}cos(4{\pi}f_ct+{\phi}(t))+cos({\phi}(t)){\}}
y
I
(
t
)
=
s
(
t
)
cos
(
2
π
f
c
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
cos
(
2
π
f
c
t
)
y
I
(
t
)
=
2
a
(
t
)
{
cos
(
4
π
f
c
t
+
ϕ
(
t
))
+
cos
(
ϕ
(
t
))
}
经过低通滤波,再放大一倍后,有
y
I
(
t
)
=
a
(
t
)
c
o
s
(
ϕ
(
t
)
)
y_I(t) = a(t)cos({\phi}(t))
y
I
(
t
)
=
a
(
t
)
cos
(
ϕ
(
t
))
同理,与移向后的载波信号
s
i
n
(
2
π
f
c
t
)
sin(2{\pi}f_ct)
s
in
(
2
π
f
c
t
)
进行相乘,即
Q
Q
Q
通道解调,设输出为
y
Q
(
t
)
y_Q(t)
y
Q
(
t
)
y
Q
(
t
)
=
s
(
t
)
s
i
n
(
2
π
f
c
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
s
i
n
(
2
π
f
c
t
)
y
Q
(
t
)
=
a
(
t
)
2
{
s
i
n
(
4
π
f
c
t
+
ϕ
(
t
)
)
−
s
i
n
(
ϕ
(
t
)
)
}
y_Q(t) = s(t)sin(2{\pi}f_ct)= a(t)cos[2{\pi}f_ct+{\phi}(t)]sin(2{\pi}f_ct)\\ y_Q(t) = {\frac{a(t)}{2}}{\{}sin(4{\pi}f_ct+{\phi}(t))-sin({\phi}(t)){\}}
y
Q
(
t
)
=
s
(
t
)
s
in
(
2
π
f
c
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
s
in
(
2
π
f
c
t
)
y
Q
(
t
)
=
2
a
(
t
)
{
s
in
(
4
π
f
c
t
+
ϕ
(
t
))
−
s
in
(
ϕ
(
t
))
}
再低通滤波,放大两倍再反向后有
y
Q
(
t
)
=
a
(
t
)
s
i
n
(
ϕ
(
t
)
)
y_Q(t) = a(t)sin({\phi}(t))
y
Q
(
t
)
=
a
(
t
)
s
in
(
ϕ
(
t
))
IQ解调就完成了
四、IQ解调的优点
经过解调后,有
y
I
(
t
)
=
a
(
t
)
c
o
s
(
ϕ
(
t
)
)
y
Q
(
t
)
=
a
(
t
)
s
i
n
(
ϕ
(
t
)
)
y_I(t) = a(t)cos({\phi}(t))\\ y_Q(t) = a(t)sin({\phi}(t))
y
I
(
t
)
=
a
(
t
)
cos
(
ϕ
(
t
))
y
Q
(
t
)
=
a
(
t
)
s
in
(
ϕ
(
t
))
有包络
a
(
t
)
a(t)
a
(
t
)
为
a
(
t
)
=
y
I
(
t
)
2
+
y
Q
(
t
)
2
a(t) = {\sqrt{y_I(t)^2+y_Q(t)^2}}
a
(
t
)
=
y
I
(
t
)
2
+
y
Q
(
t
)
2
有相位
ϕ
(
t
)
{\phi}(t)
ϕ
(
t
)
为
ϕ
(
t
)
=
a
r
c
t
a
n
(
y
Q
(
t
)
y
I
(
t
)
)
{\phi}(t) = arctan({\frac{y_Q(t)}{y_I(t)}})
ϕ
(
t
)
=
a
rc
t
an
(
y
I
(
t
)
y
Q
(
t
)
)
可见,
I
Q
IQ
I
Q
解调能同时获得解调信号的包络和相位。
对于普通解调,设接收信号
s
(
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
s(t) = a(t)cos[2{\pi}f_ct+{\phi}(t)]
s
(
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
,那么解调后输出信号为
R
(
t
)
R(t)
R
(
t
)
,有
R
(
t
)
=
s
(
t
)
c
o
s
(
2
π
f
c
t
)
=
a
(
t
)
c
o
s
[
2
π
f
c
t
+
ϕ
(
t
)
]
c
o
s
(
2
π
f
c
t
)
R
(
t
)
=
a
(
t
)
2
{
c
o
s
(
4
π
f
c
t
+
ϕ
(
t
)
)
+
c
o
s
(
ϕ
(
t
)
)
}
R(t) = s(t)cos(2{\pi}f_ct)= a(t)cos[2{\pi}f_ct+{\phi}(t)]cos(2{\pi}f_ct)\\ R(t) = {\frac{a(t)}{2}}{\{}cos(4{\pi}f_ct+{\phi}(t))+cos({\phi}(t)){\}}
R
(
t
)
=
s
(
t
)
cos
(
2
π
f
c
t
)
=
a
(
t
)
cos
[
2
π
f
c
t
+
ϕ
(
t
)]
cos
(
2
π
f
c
t
)
R
(
t
)
=
2
a
(
t
)
{
cos
(
4
π
f
c
t
+
ϕ
(
t
))
+
cos
(
ϕ
(
t
))
}
经过低通滤波,再放大一倍后,有
y
I
(
t
)
=
a
(
t
)
c
o
s
(
ϕ
(
t
)
)
y_I(t) = a(t)cos({\phi}(t))
y
I
(
t
)
=
a
(
t
)
cos
(
ϕ
(
t
))
经过包络检波,可以获得包络
a
(
t
)
a(t)
a
(
t
)
,然而相位就很难获得了。
总结
看个图吧