目录
1.算法概述
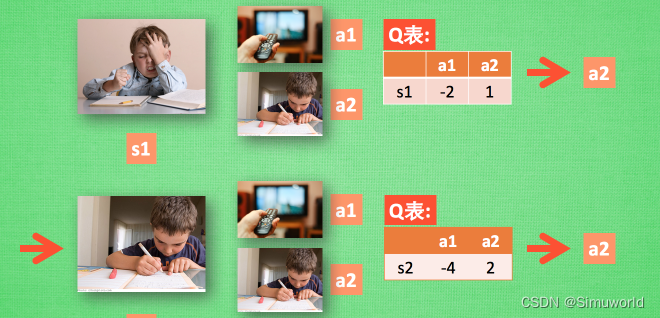
①强化学习是做出最佳决策的科学。它可以帮助我们制定活的物种所表现出的奖励动机行为。比方说,你想让一个孩子坐下来学习考试。要做到这一点非常困难,但是如果每次完成一章/主题时都给他一块巧克力,他就会明白,如果他继续学习,他会得到更多的巧克力棒。所以他会有一些学习考试的动机。
②孩子代表着Agent代理 。奖励制度和考试代表了Environment环境。今天的题目是类似于强化学习的States状态。所以,孩子必须决
版权声明:本文为Simuworld原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。