基于梯形加减速的步进电机控制
##1.步进电机基础方程##
如果要步进电机以恒定的速度旋转,我们就需固频率发送脉冲,我们通过控制器的定时功
能来实现脉冲发送,如图1-1所示,t0为脉冲发送的起始时刻,t1为发送第二个脉冲的时刻,t2为发送第三个脉冲的时刻。t0与t1之间的时间隔(时间延时)为△t= c0 * Tt,其中c0为定时器在t0与t1这段时间的定时器计数值,Tt为定时器的计数周期。t1与t2之前的时间隔为△t= c1 * Tt,其中c1为定时器在t1与t2这段时间的计数值,Tt为定时器的计数周期。比如说我们在程 序中配置定时器预分频器为35,那定时器钟频率为Ft=72 MHz/(35+1)=2MHz,那么周期Tt值就是1/2M,c就是以Tt为基本单位的一个完整步进脉冲定时器计数值。我们配置定时器通道为翻转输出,比如当定时器计数到num值时发生翻转,翻转2次得到一个完整脉冲,即总计数值为2 * num。
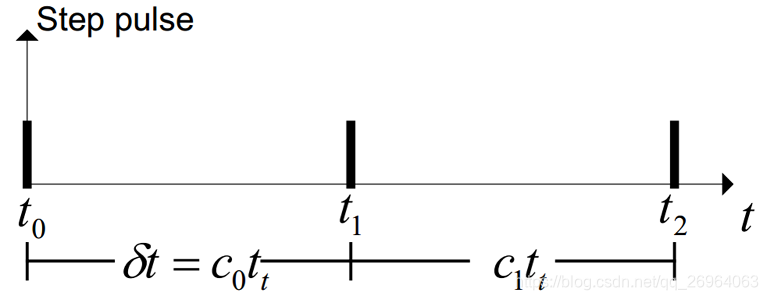
图1-1
我们可以假定产生脉冲的时器计数频率为Ft,那么Tt=1/Ft,可以推出以下公式(中括号里边为单位,下同):
公式1-1 脉冲时间间隔:△t= c * Tt =c/Ft (s)
另外,我们可以得到步进电机步距角α,位置θ和速度ω计算方法:
公式1-2步距角α,位置θ和速度ω计算方法:
步距角α: α=2 * pi/spr(rad)
位置?: θ=nα(rad)
速度ω: ω=α/△t (rad/sec)
=α*Ft/c (rad/sec)
其中 :
spr:steps per round,步进电机旋转一圈脉冲数,为与电机相关常数
n:脉冲数
rad:弧度单位 1rad/sec=60/2π≈9.55rpm
rpm:转每分钟(rounds per minutes),常用转速单位
##2.直线加减速 ##
为让步进电机尽量不出现丢步和过冲情况,在电机启动和停止过程使用加减速是非常有必要的。在加减速在加减速阶段,加速度阶段,加速度 (a)、速度 (ω)和位置(θ)
版权声明:本文为qq_26964063原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。