所谓“标定”就是为了得到数学里的一个矩阵关系。空间中一点(x,y,z) 到空间中另外一点(x1,y1,z1)可以经过平移,旋转重合。
这个平移和旋转的过程(仿射变换)被记录在矩阵关系中(齐次矩阵)。
例如下面简单的Halcon代码(二维变化)
hom_mat2d_identity (HomMat2DIdentity)
tx:=20
ty:=30
* 平移20,30像素
hom_mat2d_translate (HomMat2DIdentity, tx, ty, HomMat2DTranslate)
* 旋转90度
angle:=rad(90)
hom_mat2d_rotate (HomMat2DTranslate, angle, 0, 0, HomMat2DRotate)
*计算点(20,30)经过上面的平移旋转后的坐标点(-60,40)
affine_trans_point_2d (HomMat2DRotate, 20, 30, Qx1, Qy1)

请注意,齐次矩阵作为元组逐行存储;最后一行不存储,因为它对于描述仿射变换的所有齐次矩阵都是相同的。 因此,Hom Mat2DIdentity被存储为元组[1,0,0,1,0]。
标定的目的就是为了得到上面代码里的 HomMat2DRotate。有了这个变换矩阵,再给定一个点,就可以得到相同变化后目标点(Qx1,Qy1)
常见的标定有:九点标定和标定板标定。
九点标定
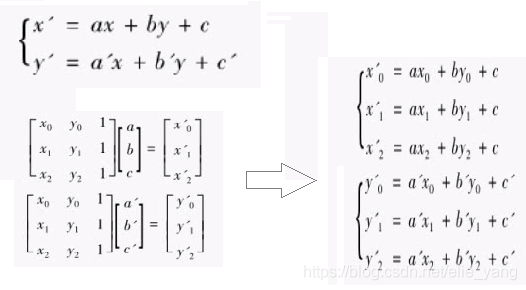
原理:简单来理解,假如有人告诉你A坐标系(例如相机图像坐标系)的一点(x=10,y=20像素),在B坐标系(例如机械手所在坐标系)里看到的是(x1=2,y1=4), 接下来,他问你如果是(x’=20,y’=30)在B里看到的是多少呢?
此时会有无数种答案,但如果给定更多的限制条件,例如更多的点(3个以上)在A、B坐标系的对应关系被找到,此时再来问(x’=20,y’=30)在B里看到的是多少,则答案就是唯一的。
为何有要求3个点以上,就是求解三元一次方程的要求至少有3个已知条件。9点标定是为了提高精度。
标定的行为就是完成上面的发现更多点的对应关系,已知A坐标系的一些点(x,y),在B坐标系里去行走或视觉识别得到(x’,y’)。
然后通过求解(x,y)到(x’,y’)的关系,得到仿射变换齐次矩阵。
实例:
*已知A坐标系的9个点
Ax:=[-30,0,30,-30,0,30,-30,0,30]
Ay:=[30,30,30,0,0,0,-30,-30,-30]
*待识别的B坐标点,和上面的A坐标系点一一对应
Bx:=[]
By:=[]
for Index := 1 to 9 by 1
dev_display (Image)
* 以下过程为在B坐标系找A中的9个点
draw_rectangle1 (200000, Row1, Column1, Row2, Column2)
gen_rectangle1 (Rectangle, Row1, Column1, Row2, Column2)
reduce_domain (Image, Rectangle, ImageReduced)
binary_threshold (ImageReduced, Region, 'max_separability', 'light', UsedThreshold)
connection (Region, ConnectedRegions)
select_shape (ConnectedRegions, SelectedRegions, 'roundness', 'and', 0.7, 1)
select_shape (SelectedRegions, SelectedRegion2, 'rb', 'and', 32, 100)
fill_up (SelectedRegions, RegionFillUp)
*找到了B坐标系的点(Row,Column)
area_center (RegionFillUp, Area, Row, Column)
Bx:=[Bx,Column]
By:=[By,Row]
endfor
*得到目标变换矩阵HomMat2D
vector_to_hom_mat2d (Bx, By, Ax, Ay, HomMat2D)
*保存变换矩阵
serialize_hom_mat2d (HomMat2D, SerializedItemHandle)
open_file ('my_vector.mat', 'output_binary', FileHandle)
fwrite_serialized_item (FileHandle, SerializedItemHandle)
close_file (FileHandle)
stop ()
*读取变换矩阵,测试
open_file ('my_vector.mat', 'input_binary', FileHandle)
fread_serialized_item (FileHandle, SerializedItemHandle)
deserialize_hom_mat2d (SerializedItemHandle, HomMat2D_9p)
close_file (FileHandle)
tx:=20
ty:=30
affine_trans_point_2d (HomMat2D_9p, tx, ty, Qx, Qy)