目录
前言:图像分割是指根据灰度、色彩、空间纹理、几何形状等特征把图像划分成若干个互不相交的区域。
•最简单的图像分割就是将物体从背景中分割出来
1.图像二值化
cv2.threshold是opencv-python中的图像二值化方法,可以实现简单的分割功能。
retval, dst = cv2.threshold(src, thresh, maxval, thresholdType[, dst])
•src:原图像,要求必须是灰度图像
•dst:结果图像
•thresh:阈值
•maxVal:结果图中像素最大值
•thresholdType:二值化类型

然而,threshold用法,有两个问题:
一:
•根据全图统一的阈值对像素进行判断,并非在所有情况下效果都好
•例如,如果图像在不同区域具有不同的光照条件

二:
•阈值需要手动设定,不同的图片合适的阈值可能不同,更换图片可能就需要调整代码

➢针对于全图统一阈值的问题,可以使用
自适应阈值分割法
•自适应阈值分割算法基于像素周围的局部区域确定像素的阈值
•同一图像的不同区域具有不同的阈值
•为光照变化的图像提供更好的分割效果
2.自适应阈值分割算法
➢dst= cv2.adaptiveThreshold(src, maxValue, adaptiveMethod,thresholdType, blockSize, C, dst=None)
参数解释如下:
•src:原图像,它必须是灰度图像
•maxValue:结果图中像素的最大值,一般设置为255
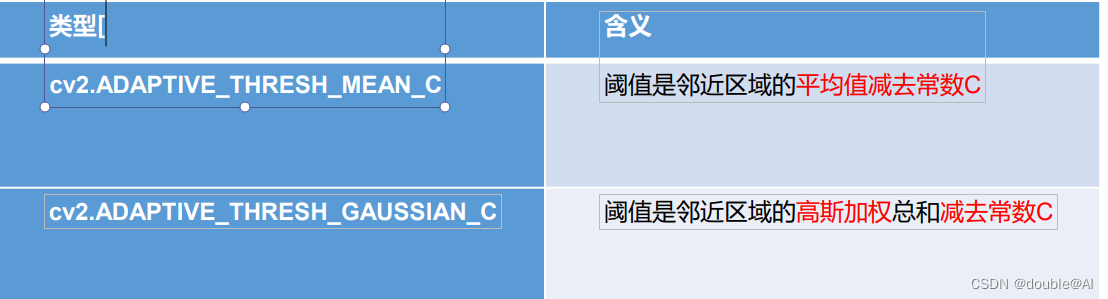
•adaptiveMethod:阈值的计算方法,包括以下两种计算方式:
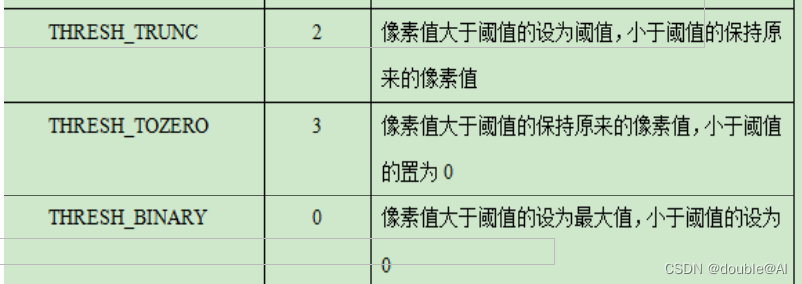
•thresholdType:二值化方式,例如cv2.THRESH_BINARY、cv2.THRESH_TRUNC、
cv2.THRESH_TOZERO等
•blockSize:局部区域的大小
•C:阈值计算中减去的常数
➢缺点:blockSize要手动指定,但物体的大小有差异
3.Otsu阈值分割算法
➢自动根据图像内容计算阈值:Otsu阈值分割算法
•大津法
•直方图技术
➢retval, dst = cv2.threshold(src, thresh, maxval, thresholdType[, dst])
参数解释如下:
•src:原图像,要求必须是灰度图像
•dst:结果图像
•thresh:阈值(无作用)
•maxVal:像素灰度最大值
•thresholdType:阈值类型,在原有参数值基础上多传递一个参数值,即cv2.THRESH_OTSU
•比如cv2.THRESH_BINARY+cv2.THRESH_OTSU
➢利用
固定阈值
算法进行分割,适用的图片较为局限•同一个阈值,在一些图像上表现好,在其他图片上效果不佳
如:

➢利用
Otsu阈值
算法进行分割,适用的图片范围较广•对每张图片,Otsu阈值算法自动找到针对性的阈值
如:

4.基于轮廓的字符分离
➢
分割步骤
•1. 检测出图像中字符的轮廓
•2. 得到每一条轮廓的包围框,根据包围框坐标提取ROI
4.1轮廓检测
➢contours, hierarchy = cv2.findContours(image, mode, method)
参数解释如下:
•contours:返回的轮廓列表,每条轮廓包含构成这条轮廓上的一系列点的坐标
•hierarchy:轮廓之间的层级关系
•image:原始图像,需要是二值图
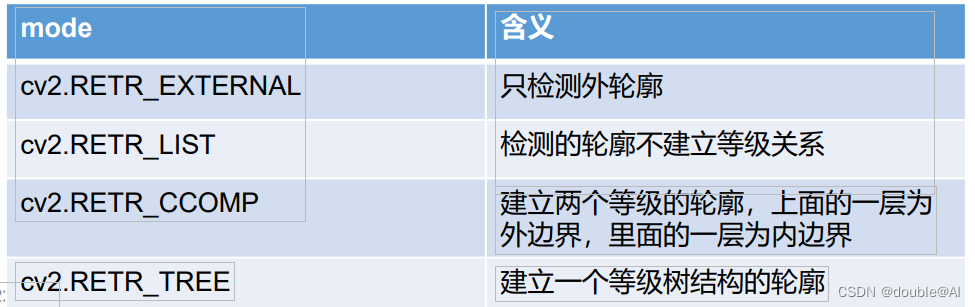
•mode:轮廓的检索模式
•method:轮廓的近似办法

4.2轮廓绘制
➢cv2.drawContours(image, contours, contourIdx, color, thickness)
•image:指定在哪张图片上绘制轮廓
•contours:轮廓列表
•contourIdx:定绘制轮廓list中的哪条轮廓,如果是-1,则绘制其中的所有轮廓
•color:轮廓颜色
•thickness(可选):轮廓宽度
import cv2
img=cv2.imread("D:\\desk\\images\\car_license\\test1.png")
#去噪
image=cv2.GaussianBlur(img,(3,3),0)
#转为灰度图
gray1 = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#Ostu阈值分割
ret, th1 = cv2.threshold(gray1, 127,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
'''轮廓检测与绘制'''
#检测轮廓(外轮廓)
th1=cv2.dilate(th1,None) #膨胀,保证同一个字符只有一个外轮廓
contours,hierarchy=cv2.findContours(th1,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
#轮廓可视化
th1_bgr=cv2.cvtColor(th1,cv2.COLOR_GRAY2BGR) #转为三通道图
cv2.drawContours(th1_bgr,contours,-1,(0,0,255),2) #轮廓可视化
cv2.imshow("th1_bgr",th1_bgr)
cv2.waitKey()
4.3包围框获取
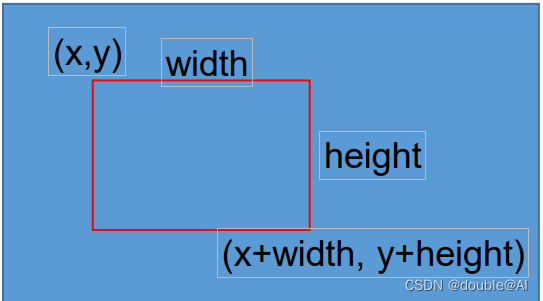
➢rect= cv2.boundingRect(points)
•points:一系列点的坐标
•rect:能够包围住这些点的最小外接矩形信息,格式为(x,y,width,height)
4.4矩形绘制
➢cv2.rectangle(img, pt1, pt2, color[, thickness)
•img:指定要绘制的图片
•pt1:矩形的某个顶点的坐标
•pt2:和pt1相对的顶点坐标
•color:矩形的颜色
•thickness(可选):矩形轮廓的宽度
基于轮廓的字符分离完整代码如下:
import cv2
img=cv2.imread("D:\\desk\\images\\car_license\\test1.png")
#去噪
image=cv2.GaussianBlur(img,(3,3),0)
#转为灰度图
gray1 = cv2.cvtColor(image, cv2.COLOR_BGR2GRAY)
#Ostu阈值分割
ret, th1 = cv2.threshold(gray1, 127,255,cv2.THRESH_BINARY+cv2.THRESH_OTSU)
'''轮廓检测与绘制'''
#检测轮廓(外轮廓)
th1=cv2.dilate(th1,None) #膨胀,保证同一个字符只有一个外轮廓
contours,hierarchy=cv2.findContours(th1,cv2.RETR_EXTERNAL,cv2.CHAIN_APPROX_SIMPLE)
#轮廓可视化
th1_bgr=cv2.cvtColor(th1,cv2.COLOR_GRAY2BGR) #转为三通道图
# cv2.drawContours(th1_bgr,contours,-1,(0,0,255),2) #轮廓可视化
'''包围框获取'''
words=[] #保存包围框信息
height,width=th1.shape
for contour in contours: #对于每一条轮廓
rest=cv2.boundingRect(contour) #得到这条轮廓的外接矩阵
#只有高宽比在1.5到3.5之间,且高 度比图片高度大于0.3的矩阵才保留
if rest[3]/rest[2]>1.5 and rest[3]/rest[2]<3.5 and rest[3]/height>0.3:
words.append(rest) #将当前矩形加入矩形列表
cv2.rectangle(th1_bgr,(rest[0],rest[1]),(rest[0]+rest[2],rest[1]+rest[3]),(0,0,255),3) #绘制矩形
#显示
# cv2.imshow("img",img)
cv2.imshow("th1",th1)
cv2.imshow("th1_bgr",th1_bgr)
cv2.waitKey()
此文章主要是知识点讲解,详细项目见小编主页,谢谢浏览!