Linux
进程间的通信可以简称为
IPC
(
InterprocessCommunication
),前面说过的
Linux
的同步工具也是属于
IPC
的一部分,这里我想说的是通常意义的进程间的实际数据通。
1
管道
管道是最早的
UNIXIPC
,所有的
UNIX
系统都支持这个
IPC
通信机制。我们最常见到使用它的位置就是
shell
中使用的管道命令。管道
IPC
有两个特性:
-
管道仅提供半双工的数据通信,即只支持单向的数据流
。 -
管道只能在有亲缘关系的进程间使用
。这是由于管道没有名字的原因,所以不能跨进程的地址空间进行使用。
这里这句话不是绝对的
,因为从技术上可以在进程间传递管道的描述符,所以是可以通过管道实现无亲缘进程间的通信的。但尽管如此,管道还是通常用于具有共同祖先的进程间的通信。
管道的接口定义如下:
#include <unistd.h>
int pipe(int filedes[2]);
//成功返回0,失败返回-1
pipe
函数用来创建一个管道,
fd
是传出参数,用于保存返回的两个文件描述符,该文件描述符用于标识管道的两端,
fd[0]
只能由于读,
fd[1]
只能用于写。
那么如果我们往
fd[0]
端写数据会是什么样的结果呢
?
下面是测试代码:
#include <iostream>
#include <cstring>
#include <unistd.h>
#include <errno.h>
using namespace std;
int main()
{
int fd[2];
if (pipe(fd) < 0)
{
cout<<"create pipe failed..."<<endl;
return -1;
}
char *temp = "yuki";
if (write(fd[0], temp, strlen(temp) + 1) < 0)
{
cout<<"write pipe failed:"<<strerror(errno)<<endl;
}
return 0;
} 代码的执行结果如下:
write pipe failed:Bad file descriptor
从这个结果可以看出,内核对于管道的
fd[0]
描述符打开的方式是以只读方式打开的,那么同理
fd[1]
是以只写方式打开的,所以管道只能保证单向的数据通信。
下图
1
显示的是一个进程内的管道的模样:

图
1
单个进程内管道的模样
从上图我们可以看到位于内核中的管道,进程通过两个文件描述符进行数据的传输,当然单个进程内的管道是没有必要的,上面只是为了更形象的表明管道的工作方式,一般管道的使用方式都是:父进程创建一个管道,然后
fork
产生一个子进程,由于子进程拥有父进程的副本,所以父子进程可以通过管道进程通信。这种使用方式如下图
2
所示:
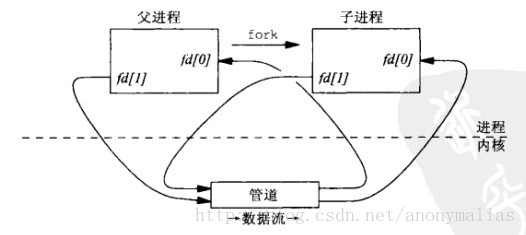
图
2
父子进程间的管道
如上图所示,当父进程通过
fork
创建子进程后,父子进程都拥有对管道操作的文件描述符,此时父子进程关闭对应的读写端,使父子进程间形成单向的管道。关闭哪个端要根据具体的数据流向决定。
1.1
父子进程间的单向通信
上面说了父进程通过
fork
创建子进程后,父子进程间可以通过管道通信,数据流的方向根据具体的应用决定。我们都知道在
shell
中,管道的数据流向都是从父进程流向子进程,即父进程关闭读端,子进程关闭写端。如下图
3
所示:

图
3
父子进程间的单向管道
上图的测试代码如下:
#include <iostream>
#include <unistd.h>
using namespace std;
int main()
{
int fd[2];
if (pipe(fd) < 0)
{
cout<<"create pipe failed..."<<endl;
return -1;
}
char buf[256];
if (fork() == 0)
{
close(fd[1]);
read(fd[0], buf, sizeof(buf));
cout<<"receive message from pipe:"<<buf<<endl;
exit(0);
}
close(fd[0]);
char *temp = "I have liked yuki...";
write(fd[1], temp, strlen(temp) + 1);
return 0;
}代码的执行结果如下:
receive message from pipe:I have liked yuki...
其中代码流程是,子进程等待父进程通过管道发送过来的数据,然后输出接收到的数据,代码中的
read
会阻塞到管道中有数据为止,具体管道的
read
和
write
的规则将会在后面介绍。
1.2
父子进程间的双向通信
由上我们知道,一个管道只能支持亲缘进程间的单向通信即半双工通信。如果要想通过管道来支持双向通信呢,那这里就需要创建两个管道,
fd1
,
fd2
;父进程中关闭
fd1[0]
,
fd2[1]
,子进程中关闭
fd1[1]
,
fd2[0]
。这种通信模式如下图所示:

图
4
父子进程间的双向通信
下面是双向通信的测试代码:
#include <iostream>
#include <unistd.h>
using namespace std;
int main()
{
int fd1[2], fd2[2];
if (pipe(fd1) < 0 || pipe(fd2) < 0)
{
cout<<"create pipe failed..."<<endl;
return -1;
}
char buf[256];
char *temp = "I have liked yuki...";
if (fork() == 0)
{
close(fd1[1]);
close(fd2[0]);
read(fd1[0], buf, sizeof(buf));
cout<<"child:receive message from pipe 1:"<<buf<<endl;
write(fd2[1], temp, strlen(temp) + 1);
exit(0);
}
close(fd1[0]);
close(fd2[1]);
write(fd1[1], temp, strlen(temp) + 1);
read(fd2[0], buf, sizeof(buf));
cout<<"parent:receive message from pipe 2:"<<buf<<endl;
return 0;
}代码的执行结果如下:
child:receive message from pipe 1:I have liked yuki...
parent:receive message from pipe 2:I have liked yuki...
其中代码的流程是父进程创建了两个管道,我们可以用
fd1
,
fd2
表示,管道
fd1
负责父进程向子进程发送数据,
fd2
负责子进程想父进程发送数据。进程启动后,子进程等待父进程通过管道
fd1
发送数据,当子进程收到父进程的数据后,输出消息,并通过管道
fd2
回复父进程,然后子进程退出,父进程收到子进程的响应后,输出消息并退出。
前面已经说了对管道的
read
会阻塞到管道中有数据为止,具体管道的
read
和
write
的规则将会在后面介绍。
1.3popen
和
pclose
函数
作为关于管道的一个实例,就是标准
I/O
函数库提供的
popen
函数,该函数创建一个管道,并
fork
一个子进程,该子进程根据
popen
传入的参数,关闭管道的对应端,然后执行传入的
shell
命令,然后等待终止。
调用进程和
fork
的子进程之间形成一个管道。调用进程和执行
shell
命令的子进程之间的管道通信是通过
popen
返回的
FILE*
来间接的实现的,调用进程通过标准文件
I/O
来写入或读取管道。
下面是这两个函数的声明。
#include <stdio.h>
FILE *popen(const char *command, const char *type);
//成功返回标准文件I/O指针,失败返回NULL
int pclose(FILE *stream);
//成功返回shell的终止状态,失败返回-1
command
:该传入参数是一个
shell
命令行,这个命令是通过
shell
处理的。
type
:该参数决定调用进程对要执行的
command
的处理,
type
有如下两种情况:
-
type=“r”,调用进程将读取
command
执行后的标准输出,该标准输出通过返回的
FILE*
来操作;
-
type=“w”,调用进程将写
command
执行过程中的标准输入;
pclose
函数会关闭由
popen
创建的标准
I/O
流,等待其中的命令终止,然后返回
shell
的执行状态。
下面是关于
popen
的测试代码:
#include <iostream>
#include <cstdio>
#include <unistd.h>
using namespace std;
int main()
{
char *cmd = "ls /usr/local/bin ";
FILE *p = popen(cmd, "r");
char buf[256];
while (fgets(buf, 256, p) != NULL)
{
cout<<buf;
}
pclose(p);
return 0;
}程序的执行结果如下所示:
ccmake
cmake
cpack
CSGMP_CG_Server
CSGMP_Start.sh
ctest
...
程序的执行流程如下:调用进程执行
popen
时,会创建一个管道,然后
fork
生成一个子进程,子进程执行
popen
传入的
“ls/usr/local/bin”shell
命令,子进程将执行结果通过管道传递给调用进程,调用进程通过标准文件
I/O
来读取管道中的数据
,
并输出显示。
2FIFO
POSIX
标准中的
FIFO
又名
有名管道或命名管道
。我们知道前面讲述的
POSIX
标准中管道是没有名称的,所以它的最大劣势是只能用于具有亲缘关系的进程间的通信。
FIFO
最大的特性就是每个
FIFO
都有一个路径名与之相关联,从而允许无亲缘关系的任意两个进程间通过
FIFO
进行通信。
所以,
FIFO
的两个特性:
-
和管道一样,
FIFO
仅提供半双工的数据通信,即只支持单向的数据流
。 -
和管道不同的是,
FIFO
可以支持任意两个进程间的通信
。
下面是
FIFO
的接口定义:
#include <sys/types.h>
#include <sys/stat.h>
int mkfifo(const char *pathname, mode_t mode);
//成功则返回0,失败返回-1
pathname
:一个
Linux
路径名,它是
FIFO
的名字。即每个
FIFO
与一个路径名相对应。
mode
:指定的文件权限位,类似于
open
函数的第三个参数。即创建该
FIFO
时,指定用户的访问权限,有以下值:
S_IRUSR
,
S_IWUSR
,
S_IRGRP
,
S_IWGRP
,
S_IROTH
,
S_IWOTH
。
mkfifo
函数默认指定
O_CREAT|O_EXECL
方式创建
FIFO
,如果创建成功,直接返回
0
。
如果
FIFO
已经存在,则创建失败,会返回
-1
并且
errno
置为
EEXIST
。对于其他错误,则置响应的
errno
值;
当创建一个
FIFO
后,它必须以只读方式打开或者只写方式打开,所以可以用
open
函数,当然也可以使用标准的文件
I/O
打开函数,例如
fopen
来打开。由于
FIFO
是半双工的,所以不能够同时打开来读和写。
其实一般的文件
I/O
函数,如
read
,
write
,
close
,
unlink
都可用于
FIFO
。对于管道和
FIFO
的
write
操作总是会向末尾添加数据,而对他们的
read
则总是会从开头数据,所以不能对管道和
FIFO
中间的数据进行操作,因此对管道和
FIFO
使用
lseek
函数,是错误的,会返回
ESPIPE
错误。
mkfifo
的
一般使用方式
是:通过
mkfifo
创建
FIFO
,然后调用
open
,以读或者写的方式之一打开
FIFO
,然后进行数据通信。
下面是
FIFO
的一个简单的测试代码:
#include <iostream>
#include <unistd.h>
#include <fcntl.h>
#include <errno.h>
#include <sys/stat.h>
#include <sys/types.h>
using namespace std;
#define FIFO_PATH "/home/anonym/fifo"
int main()
{
if (mkfifo(FIFO_PATH, 0666) < 0 && errno != EEXIST)
{
cout<<"create fifo failed..."<<endl;
return -1;
}
if (fork() == 0)
{
int readfd = open(FIFO_PATH, O_RDONLY);
cout<<"child open fifo success..."<<endl;
char buf[256];
read(readfd, buf, sizeof(buf));
cout<<"receive message from pipe:"<<buf<<endl;
close(readfd);
exit(0);
}
sleep(3);
int writefd = open(FIFO_PATH, O_WRONLY);
cout<<"parent open fifo success..."<<endl;
char *temp = "i love you";
write(writefd, temp, strlen(temp) + 1);
close(writefd);
}程序的执行结果如下:
parent open fifo success...
child open fifo success...
receive message from pipe:i love you
由上面的运行结果可以看到,子进程以读方式
open
的操作会阻塞到父进程以写方式
open
;关于这一点以及
read
和
write
的操作会在后面管道和
FIFO
的属性部分进行介绍;
POSIX
标准不仅规定了对
mkfifoIPC
的支持,还包括了对
mkfifoshell
命令的支持,所以符合
POSIX
标准的
UNIX
中都含有
mkfifo
命令来创建有名管道,例如下面是在
Linux
2.6.18的测试:
[root@idcserver program]# mkfifo skywalker
[root@idcserver program]# echo "I have liked yuki..." >skywalker &
[1] 28839
[root@idcserver program]# cat < skywalker
I have liked yuki...
[1]+ Done echo "I have liked yuki..." > skywalker
这里在第二行最后加上‘
&
’使进程转到后台运行,是因为
FIFO
以只写方式打开需要阻塞到
FIFO
以只读方式打开为止,所以必须要作为后台程序运行,否则进程会阻塞在前端,无法再进行相关输入;
1.3
管道和
FIFO
的属性
由于在
POSIX
标准中,管道和
FIFO
都是通过文件描述符来进行操作的,默认的情况下,对他们的操作都是阻塞的,当然也可以通过设置来使对他们的操作变成非阻塞的。我们都知道可以有两种方式来设置一个文件描述符为
O_NONBLOCK
非阻塞的:
-
调用
open
时,指定
O_NONBLOCK
标志。例如:
int fd = open(FILE_NAME, O_RDONLY | O_NONBLOCK);-
通过
fcntl
文件描述符控制操作函数,对一个已经打开的描述符启用
O_NONBLOCK
标志。其中对于管道必须使用这种方式。示例如下:
int flag;
flag = fcntl(fd, F_GETFL, 0);
flag |= O_NONBLOCK;
fcntl(fd, F_SETFL, flag);
下图主要说明了对管道和
FIFO
的各种操作在阻塞和非阻塞状态下的不同,这张图对对于理解和使用管道和
FIFO
是非常重要的。

图
5
管道和
FIFO
的各种操作
从上图我们看到关于管道和
FIFO
的读出和写入的若干规则,主要需要注意的有以下几点:
-
以只读方式
openFIFO
时,如果
FIFO
还没有以只写方式
open
,那么在阻塞模式下,该操作会阻塞到
FIFO
以只写方式
open
为止。
-
以只写方式
openFIFO
时,如果
FIFO
还没有以只读方式
open
,那么在阻塞模式下,该操作会阻塞到
FIFO
以只读方式
open
为止。
-
从空管道或空
FIFO
中
read
,如果管道和
FIFO
已打开来写,在阻塞模式下,那么该操作会阻塞到管道或
FIFO
有数据为止,或管道或
FIFO
不再以写方式打开。如果管道和
FIFO
没有打开来写,那么该操作会返回
0
;
-
向管道或
FIFO
中
write
,如果管道或
FIFO
没有打开来读,那么内核会产生
SIGPIPE
信号,默认情况下,该信号会终止该进程。
另外对于管道和
FIFO
还需要说明的若干规则如下:
-
如果请求
write
的数据的字节数小于等于
PIPE_BUF
(
POSIX
关于管道和
FIFO
大小的限制值),那么
write
操作可以保证是原子的,如果大于
PIPE_BUF
,那么就不能保证了。
那么由此可知
write
的原子性是由写入数据的字节数是否小于等于
PIPE_BUF
决定的,和是不是
O_NONBLOCK
没有关系。
下面是在阻塞和非阻塞情况下,
write
不同大小的数据的操作结果:
在
阻塞
的情况下:
-
如果
write
的字节数小于等于
PIPE_BUF
,那么
write
会阻塞到写入所有数据,并且写入操作是原子的。
-
如果
write
的字节数大于
PIPE_BUF
,那么
write
会阻塞到写入所有数据,但写入操作不是原子的,即
write
会根据当前缓冲区剩余的大小,写入相应的字节数,然后等待下一次有空余的缓冲区,这中间可能会有其他进程进行
write
操作。
在
非阻塞
的情况下:
-
如果
write
的字节数小于等于
PIPE_BUF
,且管道或
FIFO
有足以存放要写入数据大小的空间,那么就写入所有数据;
-
如果
write
的字节数小于等于
PIPE_BUF
,且管道或
FIFO
没有足够存放要写入数据大小的空间,那么就会立即返回
EAGAIN
错误。
-
如果
write
的字节数大于
PIPE_BUF
,且管道或
FIFO
有至少
1B
的空间,那么就内核就会写入相应的字节数,然后返回已写入的字节数;
-
如果
write
的字节数大于
PIPE_BUF
,且管道或
FIFO
无任何的空间,那么就会立即返回
EAGAIN
错误。
1.4
管道和
FIFO
的限制
系统内核对于管道和
FIFO
的唯一限制为:
OPEN_MAX
和
PIPE_BUF;
OPEN_MAX
:一个进程在任意时刻可以打开的最大描述符数。
PIPE_BUF
标识一个管道可以原子写入管道和
FIFO
的最大字节数,并不是管道或
FIFO
的容量。
关于这两个系统限制,
POSIX
标准中都有定义的不变最小值:
POSIX_OPEN_MAX
和
_POSIX_PIPE_BUF
,这两个宏是
POSXI
标准定义的编译时确定的值,他们是标准定义的且不会改变的,
POSIX
标准关于这两个值的限制为:
cout<<_POSIX_OPEN_MAX<<endl;
cout<<_POSIX_PIPE_BUF<<endl;
//运行结果为:
20
512
我们都知道,关于
POSIX
的每个不变最小值都有一个具体的系统的实现值,这些是实现值由具体的系统决定,通过调用以下函数在运行时确定这个实现值:
#include <unistd.h>
long sysconf(int name);
long fpathconf(int filedes, int name);
long pathconf(char *path, int name);
//成功返回具体的值,失败返回-1
其中
sysconf
是用于返回系统限制值,这些值是以
_SC_
开头的常量,
pathconf和fpathconf是用于返回与文件和目录相关的运行时的限制值,这些值都是以_PC_
开头的常量;下面是在
Linux
2.6.18下的测试代码:
cout<<sysconf(_SC_OPEN_MAX)<<endl;
cout<<pathconf(FIFO_PATH, _PC_PATH_MAX)<<endl;
//运行结果为:
1024
4096
当然上面两个系统限制值的具体实现值也可以通过
ulimit
命令来查看,下面是在
Linux
2.6.18下查看的结果:
[root@idcserver program]# ulimit -a
...
open files (-n) 1024
pipe size (512 bytes, -p) 8
...
这两个值在
LinuxLinux
2.6.18下都是不允许修改的,也是没有必要修改的;
Jul 20, 2013 16:52 @library
机会永远都是留给有准备的人。。。