图像映射
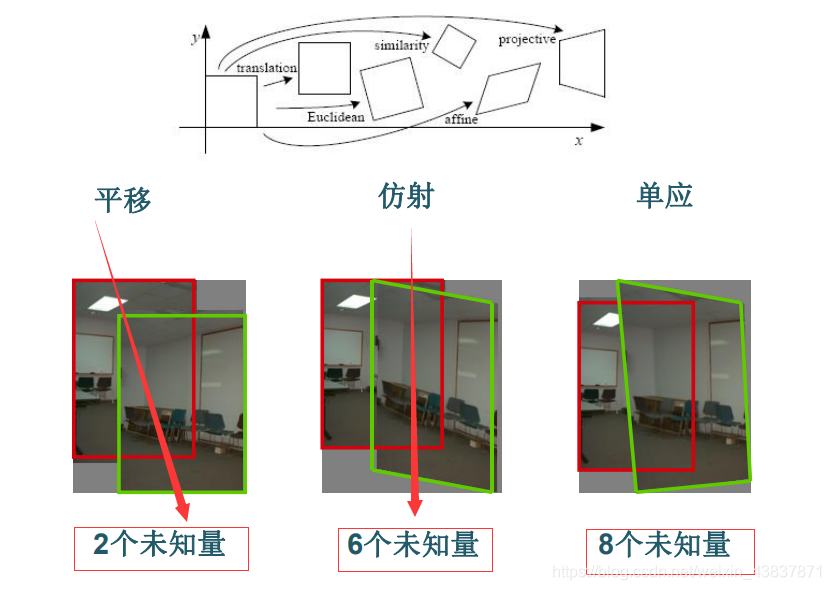
图像映射就是图像之间的变换,加上使用一些计算变换的方法。可以实现图像扭曲变形和图像配准,适用于全景拼接。普遍变换方法有单应性变换、仿射变换、阿尔法通道等等。图像的映射类型有:平移、旋转、仿射、透视映射、尺度变换,不同的类型对应不一样的方法。经过这些处理就可以达到自己想要实现的映射效果。
(一)原理解析
(1)单应性变换(homography)
矩阵的一个重要作用是将空间中的点变换到另一个空间中。比较形像直观地理解的方法就是图像变换,图像变换的方法很多,单应性变换是其中一种方法,单应性变换会涉及到单应性矩阵。单应性变换的目标是通过给定的几个点(通常是4对点)来得到单应性矩阵。以下为单应性矩阵的推导过程。

单应性矩阵
H
仅依赖尺度定义,所以,单应性矩阵具有
8
个独立自由度。通常会使第三个值为一来归一化点,即 :
a
点坐标(x , y , z ) 转换成
a’
(x , y , 1)这样,点就具有唯一的图像坐标
x
和
y
。这个额外的坐标使得我们可以简单使用一个矩阵来表示表换。例如:矩阵H会将一幅图像上的一个点的坐标
a
=(x,y,1)映射成另一幅图像上的点的坐标
b
=(x1,y1,1),已知
a
和
b
,它们是在同一平面上。 则有下面的公式:
即:
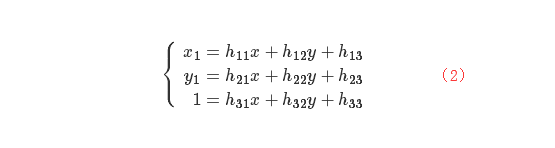
由上面的公式
1=h31x+h32y+h331 可得到:
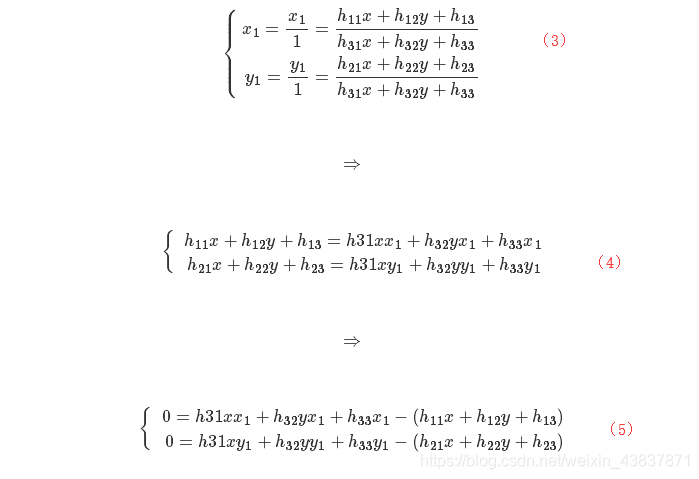
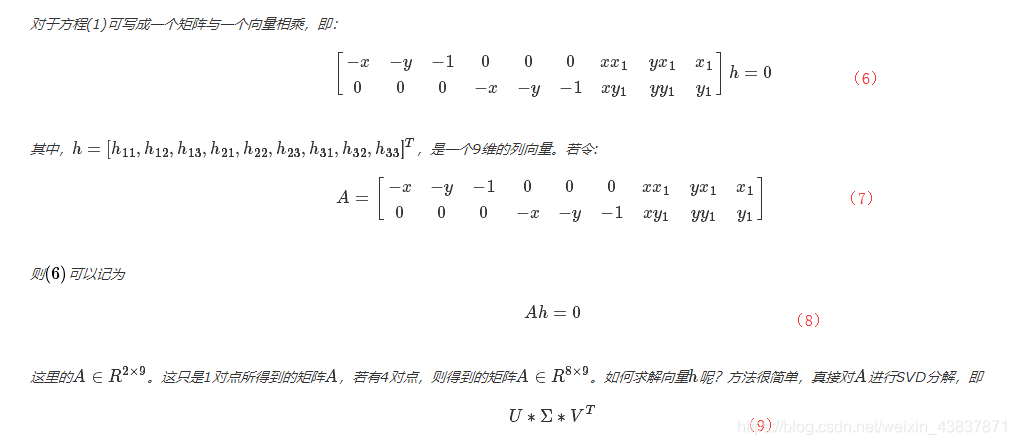
然后取
V
的最后一列出来作为求解hh。因为矩阵
A
是行满秩,即只有一个自由度。具体实现需要输入两张图片,在两张图片之间找到4个点坐标,由此得到矩阵H。
(2)仿射变换
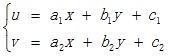
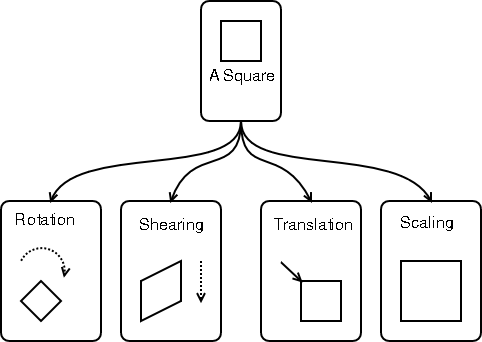
仿射变换(Affine Transformation )是一种二维坐标(x, y)到二维坐标(u, v)的线性变换,保持二维图形的”平直性”(即变换后直线还是直线不会打弯,圆弧还是圆弧)和”平行性”(译注:par
常用的仿射变换:旋转、倾斜、平移、缩放
allelness,指保持二维图形间的相对位置关系不变,平行线还是平行线,而直线上点的位置顺序不变,需要注意向量间夹角可能会发生变化)。由于仿射变换具有6个自由度,因此需要三个对应点对估计矩阵H。通过最后两个元素设置为0,再通过直接线性变换(DLT)估计算出。可以通过Haffine_from_points(fp,tp)函数使用对应点对来计算仿射变换矩阵。其线性表达式形式如下:
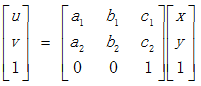
对应的齐次坐标矩阵表示形式为:此类变换可以用一个3×3的矩阵来表示,其最后一行为(0, 0, 1)。该变换矩阵将原坐标(x, y)变换为新坐标(x’, y’),这里原坐标和新坐标皆视为最末一行为(1)的三维列向量,原列向量左乘变换矩阵得到新的列向量:
(3)alpha通道
阿尔法
通道
是一个8位的灰度通道,该通道用256级灰度来记录图像中的透明度信息,定义透明、不透明和半透明区域,其中白表示不透明,黑表示透明,灰表示半透明。
(二)仿射变换将一幅图像放置到另外一幅图像中
仿射扭曲im1到im3的例子:
# -*- coding: utf-8 -*-
from PCV.geometry import warp, homography
from PIL import Image
from pylab import *
from scipy import ndimage
# example of affine warp of im1 onto im2
im1 = array(Image.open('E.jpg').convert('L'))
im2 = array(Image.open('G.jpg').convert('L'))
# set to points
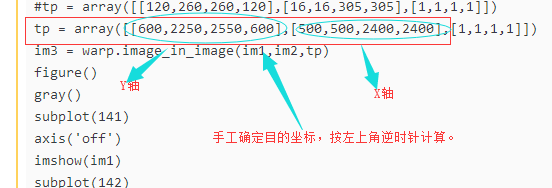
#tp = array([[120,260,260,120],[16,16,305,305],[1,1,1,1]])
tp = array([[600,2250,2550,600],[500,500,2400,2400],[1,1,1,1]])
im3 = warp.image_in_image(im1,im2,tp)
figure()
gray()
subplot(141)
axis('off')
imshow(im1)
subplot(142)
axis('off')
imshow(im2)
subplot(143)
axis('off')
imshow(im3)
# set from points to corners of im1
m,n = im1.shape[:2]
fp = array([[0,m,m,0],[0,0,n,n],[1,1,1,1]])
# first triangle
tp2 = tp[:,:3]
fp2 = fp[:,:3]
# compute H
H = homography.Haffine_from_points(tp2,fp2)
im1_t = ndimage.affine_transform(im1,H[:2,:2],
(H[0,2],H[1,2]),im2.shape[:2])
# alpha for triangle
alpha = warp.alpha_for_triangle(tp2,im2.shape[0],im2.shape[1])
im3 = (1-alpha)*im2 + alpha*im1_t
# second triangle
tp2 = tp[:,[0,2,3]]
fp2 = fp[:,[0,2,3]]
# compute H
H = homography.Haffine_from_points(tp2,fp2)
im1_t = ndimage.affine_transform(im1,H[:2,:2],
(H[0,2],H[1,2]),im2.shape[:2])
# alpha for triangle
alpha = warp.alpha_for_triangle(tp2,im2.shape[0],im2.shape[1])
im4 = (1-alpha)*im3 + alpha*im1_t
subplot(144)
imshow(im4)
axis('off')
show()warp.py.
from scipy.spatial import Delaunay
from scipy import ndimage
from pylab import *
from numpy import *
from PCV.geometry import homography
def image_in_image(im1,im2,tp):
""" Put im1 in im2 with an affine transformation
such that corners are as close to tp as possible.
tp are homogeneous and counter-clockwise from top left. """
# points to warp from
m,n = im1.shape[:2]
fp = array([[0,m,m,0],[0,0,n,n],[1,1,1,1]])
# compute affine transform and apply
H = homography.Haffine_from_points(tp,fp)
im1_t = ndimage.affine_transform(im1,H[:2,:2],
(H[0,2],H[1,2]),im2.shape[:2])
alpha = (im1_t > 0)
return (1-alpha)*im2 + alpha*im1_t
def combine_images(im1,im2,alpha):
""" Blend two images with weights as in alpha. """
return (1-alpha)*im1 + alpha*im2
def alpha_for_triangle(points,m,n):
""" Creates alpha map of size (m,n)
for a triangle with corners defined by points
(given in normalized homogeneous coordinates). """
alpha = zeros((m,n))
for i in range(min(points[0]),max(points[0])):
for j in range(min(points[1]),max(points[1])):
x = linalg.solve(points,[i,j,1])
if min(x) > 0: #all coefficients positive
alpha[i,j] = 1
return alpha
def triangulate_points(x,y):
""" Delaunay triangulation of 2D points. """
centers,edges,tri,neighbors = md.delaunay(x,y)
return tri
def plot_mesh(x,y,tri):
""" Plot triangles. """
for t in tri:
t_ext = [t[0], t[1], t[2], t[0]] # add first point to end
plot(x[t_ext],y[t_ext],'r')
def pw_affine(fromim,toim,fp,tp,tri):
""" Warp triangular patches from an image.
fromim = image to warp
toim = destination image
fp = from points in hom. coordinates
tp = to points in hom. coordinates
tri = triangulation. """
im = toim.copy()
# check if image is grayscale or color
is_color = len(fromim.shape) == 3
# create image to warp to (needed if iterate colors)
im_t = zeros(im.shape, 'uint8')
for t in tri:
# compute affine transformation
H = homography.Haffine_from_points(tp[:,t],fp[:,t])
if is_color:
for col in range(fromim.shape[2]):
im_t[:,:,col] = ndimage.affine_transform(
fromim[:,:,col],H[:2,:2],(H[0,2],H[1,2]),im.shape[:2])
else:
im_t = ndimage.affine_transform(
fromim,H[:2,:2],(H[0,2],H[1,2]),im.shape[:2])
# alpha for triangle
alpha = alpha_for_triangle(tp[:,t],im.shape[0],im.shape[1])
# add triangle to image
im[alpha>0] = im_t[alpha>0]
return im
def panorama(H,fromim,toim,padding=2400,delta=2400):
""" Create horizontal panorama by blending two images
using a homography H (preferably estimated using RANSAC).
The result is an image with the same height as toim. 'padding'
specifies number of fill pixels and 'delta' additional translation. """
# check if images are grayscale or color
is_color = len(fromim.shape) == 3
# homography transformation for geometric_transform()
def transf(p):
p2 = dot(H,[p[0],p[1],1])
return (p2[0]/p2[2],p2[1]/p2[2])
if H[1,2]<0: # fromim is to the right
print ('warp - right')
# transform fromim
if is_color:
# pad the destination image with zeros to the right
toim_t = hstack((toim,zeros((toim.shape[0],padding,3))))
fromim_t = zeros((toim.shape[0],toim.shape[1]+padding,toim.shape[2]))
for col in range(3):
fromim_t[:,:,col] = ndimage.geometric_transform(fromim[:,:,col],
transf,(toim.shape[0],toim.shape[1]+padding))
else:
# pad the destination image with zeros to the right
toim_t = hstack((toim,zeros((toim.shape[0],padding))))
fromim_t = ndimage.geometric_transform(fromim,transf,
(toim.shape[0],toim.shape[1]+padding))
else:
print ('warp - left')
# add translation to compensate for padding to the left
H_delta = array([[1,0,0],[0,1,-delta],[0,0,1]])
H = dot(H,H_delta)
# transform fromim
if is_color:
# pad the destination image with zeros to the left
toim_t = hstack((zeros((toim.shape[0],padding,3)),toim))
fromim_t = zeros((toim.shape[0],toim.shape[1]+padding,toim.shape[2]))
for col in range(3):
fromim_t[:,:,col] = ndimage.geometric_transform(fromim[:,:,col],
transf,(toim.shape[0],toim.shape[1]+padding))
else:
# pad the destination image with zeros to the left
toim_t = hstack((zeros((toim.shape[0],padding)),toim))
fromim_t = ndimage.geometric_transform(fromim,
transf,(toim.shape[0],toim.shape[1]+padding))
# blend and return (put fromim above toim)
if is_color:
# all non black pixels
alpha = ((fromim_t[:,:,0] * fromim_t[:,:,1] * fromim_t[:,:,2] ) > 0)
for col in range(3):
toim_t[:,:,col] = fromim_t[:,:,col]*alpha + toim_t[:,:,col]*(1-alpha)
else:
alpha = (fromim_t > 0)
toim_t = fromim_t*alpha + toim_t*(1-alpha)
return toim_t输出结果:


1.仿射扭曲就是讲图像或者图像的一部分放置在另一幅图像中,使得它们能够和指定的区域或者标记物对齐。在函数image_in_image()中,函数的输入参数是两幅图像和一个坐标。该坐标为将第一幅图像放置到第二幅图像中的角点坐标:

设置仿射映射的目的坐标:
(三)遇到的问题

首先下载一个PCV包,然后进入cmd命令行窗口,进到pcv的路径下,输入:
具体步骤看链接:
http://yongyuan.name/pcvwithpython/installation.html
cd PCV
python setup.py install
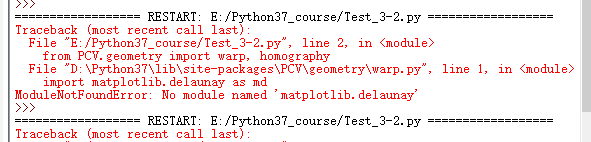
出现以上问题就是,你的python版本是python3,里面的warp.py里的删掉matplotlib包里一些方法,里面的matplotlib.delaunay不再被使用了,所以把它换成一个相同功能的就可以,可以在warp.py把import matplotlib.delaunay as md 换成from scipy.spatial import Delaunay,就可以运行。