ROS Indigo
learning_tf-02
编写一个
监听器
程序 (
Python
版)
我使用的虚拟机软件:
VMware Workstation 11
使用的
Ubuntu
系统:
Ubuntu 14.04.4 LTS
ROS
版本:
ROS Indigo
1. 这一节要做的事情:
上一节
我们已经编写了一个广播员的程序,下面我们编写一个监听器程序来监听广播员发布的小海龟的坐标系信息:
监听器程序:利用广播员程序广播的坐标信息,在同一个窗口中,有2只小海龟,我们控制
小海龟1
,让
小海龟2
自动跟随
小海龟1
运行。
2. 程序如何实现:
这个监听器,监听广播员发出的广播(
turtle1
和
turtle2
之间坐标系的变化信息),然在同个运算,把结果发布给
turtle2
订阅的
turtle2/cmd_vel
话题上,从而控制
turtle2
运动。
废话少说,开始编程。
2.1. 将路径切换到
learning_tf
软件包,在
nodes
文件夹里创建一个
turtle_tf_listener.py
文件:
learning_tf
nodes
turtle_tf_listener.py
$ roscd learning_tf
$ gedit nodes/turtle_tf_listener.py
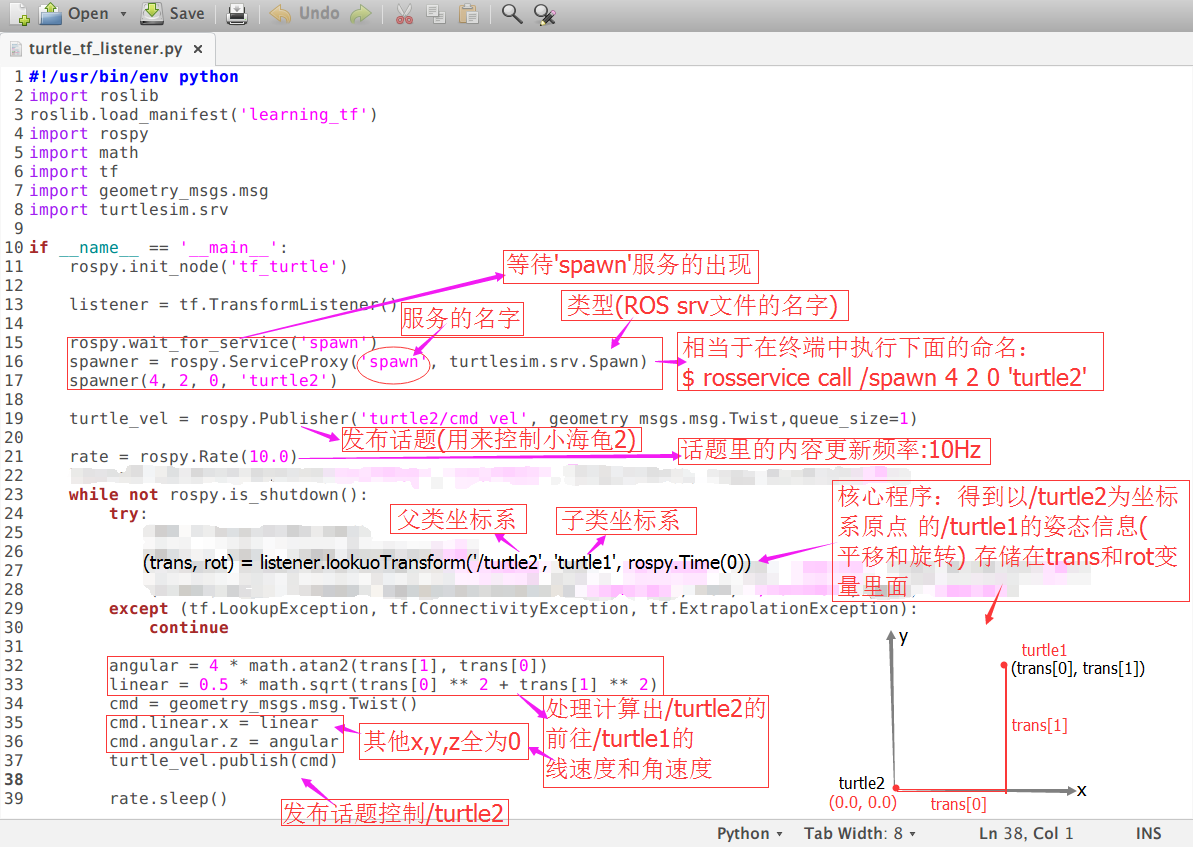
2.2. 将下面的代码添加进去:
#!/usr/bin/env python
import roslib
roslib.load_manifest('learning_tf')
import rospy
import math
import tf
import geometry_msgs.msg
import turtlesim.srv
if __name__ == '__main__':
rospy.init_node('tf_turtle')
listener = tf.TransformListener()
rospy.wait_for_service('spawn')
spawner = rospy.ServiceProxy('spawn', turtlesim.srv.Spawn)
spawner(4, 2, 0, 'turtle2')
turtle_vel = rospy.Publisher('turtle2/cmd_vel', geometry_msgs.msg.Twist, queue_size=1)
rate = rospy.Rate(10.0)
while not rospy.is_shutdown():
try:
(trans,rot) = listener.lookupTransform('/turtle2', '/turtle1',rospy.Time(0))
except (tf.LookupException, tf.ConnectivityException, tf.ExtrapolationException):
continue
angular = 4 * math.atan2(trans[1], trans[0])
linear = 0.5 * math.sqrt(trans[0] ** 2 + trans[1] ** 2)
cmd = geometry_msgs.msg.Twist()
cmd.linear.x = linear
cmd.angular.z = angular
turtle_vel.publish(cmd)
rate.sleep()
2.3. 讲解代码:
2.4. 最后一步,给这个
turtle_tf_listener.py
文件加上可执行权限:
turtle_tf_listener.py
$ chmod +x turtle_tf_listener.py
3. 运行程序
3.1. 再运行程序之前, 需要编写一个
start_demo2.launch
启动脚本文件:
start_demo2.launch
$ roscd learning_tf/launch
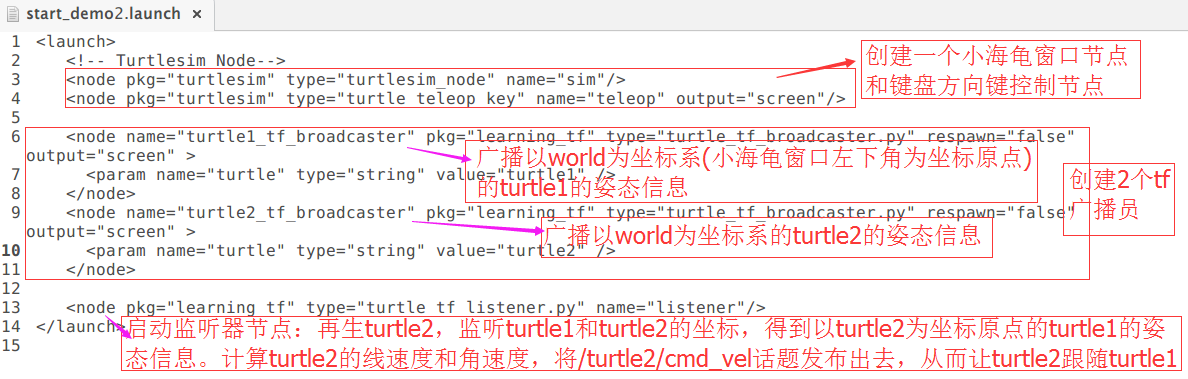
$ gedit start_demo2.launch<launch>
<!-- Turtlesim Node-->
<node pkg="turtlesim" type="turtlesim_node" name="sim"/>
<node pkg="turtlesim" type="turtle_teleop_key" name="teleop" output="screen"/>
<node name="turtle1_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle1" />
</node>
<node name="turtle2_tf_broadcaster" pkg="learning_tf" type="turtle_tf_broadcaster.py" respawn="false" output="screen" >
<param name="turtle" type="string" value="turtle2" />
</node>
<node pkg="learning_tf" type="turtle_tf_listener.py" name="listener"/>
</launch>
3.2. 讲解启动脚本程序:
3.3. 运行启动脚本文件:
$ roslaunch learning_tf start_demo2.launch
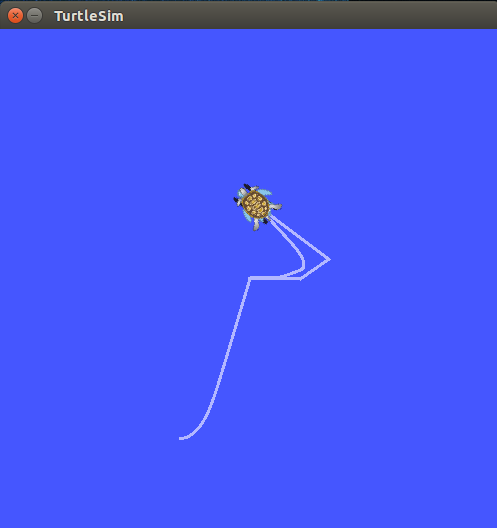
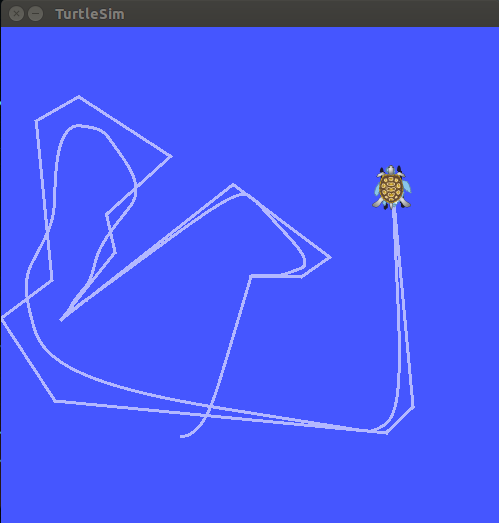
当你在当前终端中操控键盘方向键时,
turtle2
(踪色的)跟随
turtle1
(白色的):

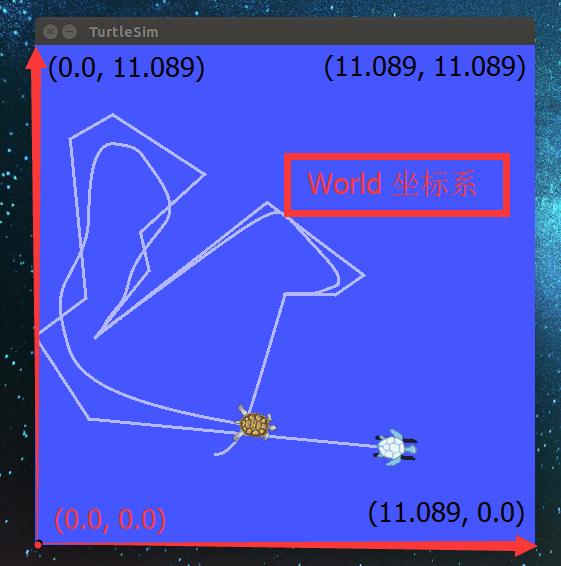
下面这幅图就是
world
固定坐标图:
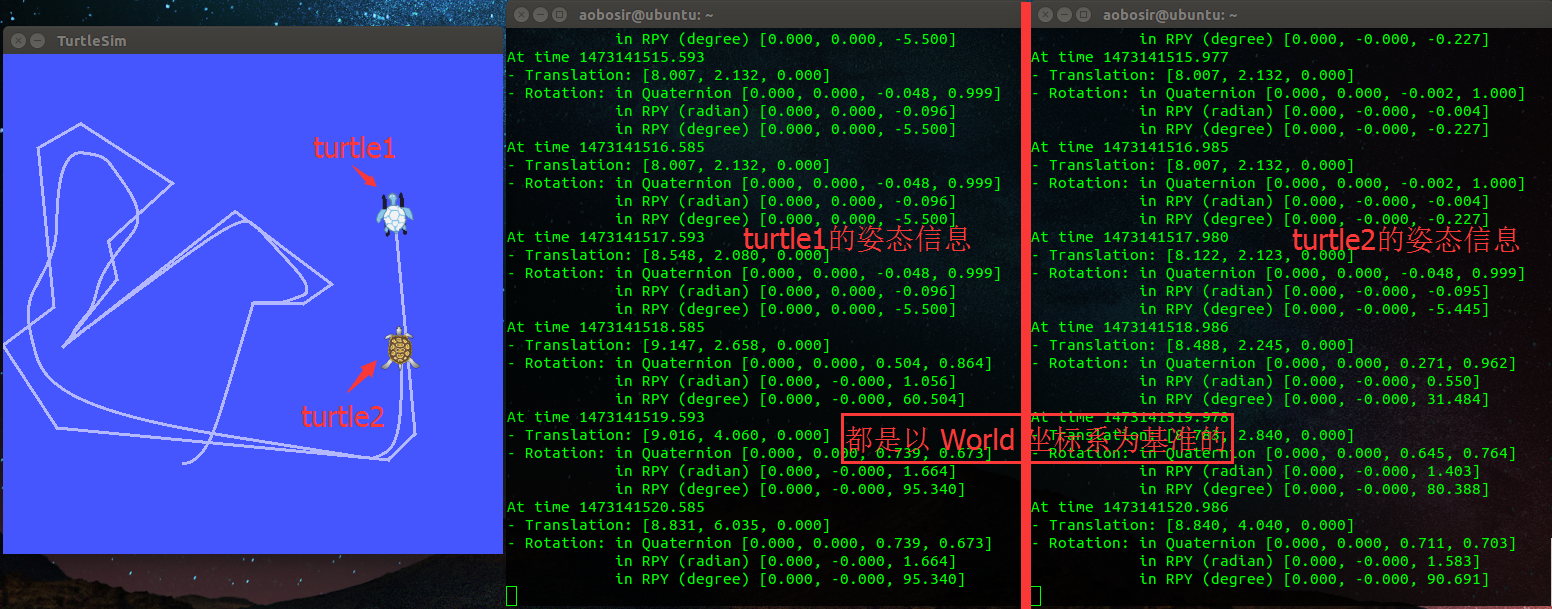
我们使用下面的命令,来打印
turtle1
和
turtle2
的姿态信息:(分别开2个终端)
$ rosrun tf tf_echo /world /turtle1
$ rosrun tf tf_echo /world /turtle2
上节讲过:
tf_echo
关键字 : 打印出
源坐标系
和
目标坐标系
之间的特定转换信息。$ rosrun tf tf_echo [源坐标系(父类)] [目标坐标系(子类)]
输出:
总结:
那么到这里,广播
tf
信息的程序 和 监听
tf
变化的监听器程序 我们都学完了。
你有没有发现,
turtle2
跟随
turtle1
,
turtle2
最终会移动到与
turtle1
重叠。看到这样的运行现象,我想你肯定不舒服,想个办法来解决这个不算是问题的问题。
下一节,我教你如何将一个额外的坐标系添加到
TF树
中,从而解决这个问题。(这非常类似于创建
TF
广播员程序)
转载于:https://www.cnblogs.com/aobosir/p/5928569.html