参考博客:
https://blog.csdn.net/l1216766050/article/details/79565705
http://www.guyuehome.com/908
以及ros wiki官网 http://wiki.ros.org/actionlib
代码主要基于古月大神博客中的代码.
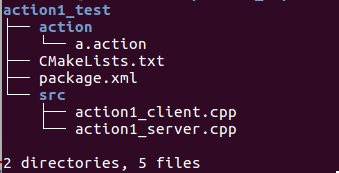
1 首先在ROS工作空间下创建action1_test软件包,用于测试代码.步骤在上面的几篇博客中已经说的很清楚.
2 在看上面几篇博客中,主要有一个问题不明白,比如第一篇博客用中的
#include "custom_act_action/custom_ActionAction.h"头文件是怎么产生的,存放在哪里,同样在第二篇博客中
#include "action_tutorials/DoDishesAction.h"
头文件是怎么产生的,存放在哪里.其实第一篇博客中已经给出了答案,但直到亲自实验后才弄明白,那就是以上头文件需要在源代码中进行定义.
如:
#include <actionlib/client/simple_action_client.h>
#include "action1_test/DoDishesAction.h"
typedef actionlib::SimpleActionClient<action1_test::DoDishesAction> Client;
// 当action完成后会调用该回调函数一次
void doneCb(const actionlib::SimpleClientGoalState& state,
const action1_test::DoDishesResultConstPtr& result)
{
ROS_INFO("Yay! The dishes are now clean");
ros::shutdown();
}
// 当action激活后会调用该回调函数一次
void activeCb()
{
ROS_INFO("Goal just went active");
}
// 收到feedback后调用该回调函数
void feedbackCb(const action1_test::DoDishesFeedbackConstPtr& feedback)
{
ROS_INFO(" percent_complete : %f ", feedback->percent_complete);
}
int main(int argc, char** argv)
{
ros::init(argc, argv, "do_dishes_client");
// 定义一个客户端
Client client("do_dishes", true);
// 等待服务器端
ROS_INFO("Waiting for action server to start.");
client.waitForServer();
ROS_INFO("Action server started, sending goal.");
// 创建一个action的goal
action1_test::DoDishesGoal goal;
goal.dishwasher_id = 1;
// 发送action的goal给服务器端,并且设置回调函数
client.sendGoal(goal, &doneCb, &activeCb, &feedbackCb);
ros::spin();
return 0;
}上面标红的部分要保持一致,我的理解是
#include "action1_test/DoDishesAction.h" 完成了动作类型的定义,后面动作类型都使用DoDishes ,如果理解不对的地方请批评指正,谢谢.
3 还要注意的一点是添加.action文件路径到CMakeLists.txt中,
add_action_files(DIRECTORY action FILES a.action)
代码改日上传到github上.
版权声明:本文为qq_29985391原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。