PHY设备驱动分析
声明:
使用其他作者原创资料较多就不一一列举,冒犯之处望海涵。我原创也不少咯。
MAC和PHY可能是集成在CPU中可能独立,下图介绍典型的MAC集成,PHY独立。两者搭配实现网卡功能。

struct phy_device {
struct phy_driver *drv; //PHY设备驱动
struct mii_bus *bus; //对应的MII总线
struct device dev; //设备文件
u32 phy_id; //PHY ID
enum phy_state state; //PHY状态
u32 dev_flags;
phy_interface_t interface; //PHY接口
int addr; //PHY 总线地址(0~31)
int speed; //速度
int duplex; //双工模式
int pause; //停止
int asym_pause; //
int link;
u32 interrupts; //中断使能标志
u32 supported;
u32 advertising;
int autoneg;
int link_timeout; //026
int irq; //中断号
void *priv; //私有数据
struct work_struct phy_queue; //PHY工作队列
struct delayed_work state_queue; //PHY延时工作队列
atomic_t irq_disable;
struct mutex lock;
struct net_device *attached_dev; //网络设备
void (*adjust_link)(struct net_device *dev);
void (*adjust_state)(struct net_device *dev);
};
struct phy_driver {
u32 phy_id; //PHY ID
char *name; //PHY名
unsigned int phy_id_mask;
u32 features; //特性
u32 flags; //标记
int (*config_init)(struct phy_device *phydev); //配置初始化
int (*probe)(struct phy_device *phydev); //探测到 probe方法
int (*suspend)(struct phy_device *phydev); //唤醒
int (*resume)(struct phy_device *phydev); //挂起
int (*config_aneg)(struct phy_device *phydev); //支援(Auto-negotiation)配置
int (*read_status)(struct phy_device *phydev); //读支援(Auto-negotiation)状态
int (*ack_interrupt)(struct phy_device *phydev); //清中断
int (*config_intr)(struct phy_device *phydev); //使能/禁用 中断
int (*did_interrupt)(struct phy_device *phydev); //判断是否由中断
void (*remove)(struct phy_device *phydev); //移除
int (*hwtstamp)(struct phy_device *phydev, struct ifreq *ifr); //时间戳处理
bool (*rxtstamp)(struct phy_device *dev, struct sk_buff *skb, int type); //接收时间戳
void (*txtstamp)(struct phy_device *dev, struct sk_buff *skb, int type); //发送时间戳
struct device_driver driver; //设备驱动文件
};
enum phy_state {
PHY_DOWN = 0, // PHY芯片和驱动没准备好,一般情况下少发生
PHY_STARTING, // PHY芯片OK了,但驱动还没有准备好
PHY_READY, // 准备好了,在probe中赋值,接下来会切到PHY_UP
PHY_PENDING,
PHY_UP, // phy启动了,可以工作了,接下来会到PHY_AN
PHY_AN, // 自动协商
PHY_RUNNING, // 正在运行中,在网络连接(插上网线)时会到这个状态
PHY_NOLINK, // 断网了
PHY_FORCING, // 强制,当自动协商不使能时,就会进行此状态(实际上会读PHY寄存器进行设置速率、双工,等)
PHY_CHANGELINK, // 变化,这个状态很重要,当连接时,会换到PHY_RUNNING,当断网时,会切到PHY_NOLINK
PHY_HALTED,
PHY_RESUMING
};
Mdio设备注册到总线
文件路径:drivers\net\ethernet\ti\davinci_mdio.c
device_initcall(davinci_mdio_init);
–> davinci_mdio_init
–>platform_driver_register(&davinci_mdio_driver);
davinci_mdio_probe
–> mdiobus_regist
Phy设备初始化:
Linux内核通过mdio总线访问、控制PHY , phy_device的注册不依靠设备树(根据上面驱动的名字在设备树中搜不到),该设备的注册在MDIO驱动中调用mdiobus_register中会注册phy_device
文件路径:drivers\net\phy\mdio_bus.c
–> mdiobus_register /* register the mii bus */
–> device_register
–> mdiobus_scan /
这个过程就是根据phy id通过mdio的mdiobus_read去读phy芯片的寄存器来检测改id下的phy设备是否存在,如果存在就把该设备使用phy_device_register注册
/
–> get_phy_device
–> get_phy_id // 读寄存器
–> phy_device_create // 创建phy设备,创建phy设备时会设置phy的接口,例如PHY_INTERFACE_MODE_GMII,以及从总线上扫描到的设备的信息赋值给phy设备
–> INIT_DELAYED_WORK(&dev->state_queue, phy_state_machine); // !!!初始化状态机函数
–> phy_device_register
在phy_device_create 时会使用mdio_bus_type这个结构体,里面有个匹配函数具体如下
/**
* mdio_bus_match - determine if given PHY driver supports the given PHY device
* @dev: target PHY device
* @drv: given PHY driver
*
* Description: Given a PHY device, and a PHY driver, return 1 if
* the driver supports the device. Otherwise, return 0.
*/
static int mdio_bus_match(struct device *dev, struct device_driver *drv)
{
struct phy_device *phydev = to_phy_device(dev);
struct phy_driver *phydrv = to_phy_driver(drv);
return ((phydrv->phy_id & phydrv->phy_id_mask) ==
(phydev->phy_id & phydrv->phy_id_mask));
}
Phy驱动注册:
nt phy_driver_register(struct phy_driver *new_driver)
{
int retval;
new_driver->driver.name = new_driver->name;
new_driver->driver.bus = &mdio_bus_type;
new_driver->driver.probe = phy_probe;
new_driver->driver.remove = phy_remove;
retval = driver_register(&new_driver->driver);
if (retval) {
printk(KERN_ERR "%s: Error %d in registering driver\n",
new_driver->name, retval);
return retval;
}
pr_debug("%s: Registered new driver\n", new_driver->name);
return 0;
}
EXPORT_SYMBOL(phy_driver_register);
状态机
phy状态变化主要在phy_state_machine函数,该函数一直在运行(每隔一秒检测一次网络状态),该函数判断不同的网络状态作出不同的动作。其中CHANGELINK是会根据网络连、断来判断是RUNNING还是NOLINK。这样,就知道网络是连接上还是断开。当连接上网络后(注:不断开情况),状态为RUNNING时,之后重新赋值CHANGELINK,到了CHANGELINK又赋值RUNNING,这两种状态之间不断切换。完整代码如下:
/**
* phy_state_machine - Handle the state machine
* @work: work_struct that describes the work to be done
*/
void phy_state_machine(struct work_struct *work)
{
struct delayed_work *dwork = to_delayed_work(work);
struct phy_device *phydev =
container_of(dwork, struct phy_device, state_queue);
bool needs_aneg = false, do_suspend = false, do_resume = false;
int err = 0;
mutex_lock(&phydev->lock);
if (phydev->drv->link_change_notify)
phydev->drv->link_change_notify(phydev);
switch (phydev->state) {
case PHY_DOWN:
case PHY_STARTING:
case PHY_READY:
case PHY_PENDING:
break;
case PHY_UP:
needs_aneg = true;
phydev->link_timeout = PHY_AN_TIMEOUT; // 超时,自动协商不成功时,则会在超时后强制设置速率等参数
break;
case PHY_AN:
err = phy_read_status(phydev); // 读phy状态,包括link,速率、双工,等等
if (err < 0)
break;
/* If the link is down, give up on negotiation for now */
if (!phydev->link) {
phydev->state = PHY_NOLINK; // 没有连接,则状态变成PHY_NOLINK
netif_carrier_off(phydev->attached_dev); // 通知内核其它网络模块(phy是最底一层)断网了。
phydev->adjust_link(phydev->attached_dev); // 调整参数(速率、双工)
break;
}
/* Check if negotiation is done. Break if there's an error */
err = phy_aneg_done(phydev); // 检测是否完成自动协商
if (err < 0)
break;
/* If AN is done, we're running */
if (err > 0) {
phydev->state = PHY_RUNNING; // 完成后,变成PHY_RUNNING状态
netif_carrier_on(phydev->attached_dev); // 发通知,连接OK
phydev->adjust_link(phydev->attached_dev); // 打印、调用参数
} else if (0 == phydev->link_timeout--)
needs_aneg = true;
break;
case PHY_NOLINK:
err = phy_read_status(phydev); // 读phy状态,包括link,速率、双工,等等
if (err)
break;
if (phydev->link) { // 在断开网络再连接(即拨掉再插上网线),就进入此语句
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev); // 如果是自动协商使能,就进行自动协商
if (err < 0)
break;
if (!err) {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
}
}
phydev->state = PHY_RUNNING; // 运行时。。。。。
netif_carrier_on(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
}
break;
case PHY_FORCING:
err = genphy_update_link(phydev); // 先更新状态
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING; // 运行。。。
netif_carrier_on(phydev->attached_dev);
} else {
if (0 == phydev->link_timeout--)
needs_aneg = true;
}
phydev->adjust_link(phydev->attached_dev);
break;
case PHY_RUNNING:
/* Only register a CHANGE if we are
* polling or ignoring interrupts
*/
if (!phy_interrupt_is_valid(phydev))
phydev->state = PHY_CHANGELINK; // 如果是RUNNING,则改变为CHANGELINK。
break;
case PHY_CHANGELINK:
err = phy_read_status(phydev); // 读phy状态,包括link,速率、双工,等等
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING; // 连接网络时,则变成RUNNING
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK; // 不连网时,变成NOLINK
netif_carrier_off(phydev->attached_dev);
}
phydev->adjust_link(phydev->attached_dev);
if (phy_interrupt_is_valid(phydev))
err = phy_config_interrupt(phydev,
PHY_INTERRUPT_ENABLED);
break;
case PHY_HALTED:
if (phydev->link) {
phydev->link = 0;
netif_carrier_off(phydev->attached_dev);
phydev->adjust_link(phydev->attached_dev);
do_suspend = true;
}
break;
case PHY_RESUMING:
err = phy_clear_interrupt(phydev);
if (err)
break;
err = phy_config_interrupt(phydev, PHY_INTERRUPT_ENABLED);
if (err)
break;
if (AUTONEG_ENABLE == phydev->autoneg) {
err = phy_aneg_done(phydev);
if (err < 0)
break;
/* err > 0 if AN is done.
* Otherwise, it's 0, and we're still waiting for AN
*/
if (err > 0) {
err = phy_read_status(phydev);
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
} else {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
}
} else {
err = phy_read_status(phydev); // 读phy状态,包括link,速率、双工,等等
if (err)
break;
if (phydev->link) {
phydev->state = PHY_RUNNING;
netif_carrier_on(phydev->attached_dev);
} else {
phydev->state = PHY_NOLINK;
}
phydev->adjust_link(phydev->attached_dev);
}
do_resume = true;
break;
}
mutex_unlock(&phydev->lock);
if (needs_aneg)
err = phy_start_aneg(phydev);
else if (do_suspend)
phy_suspend(phydev);
else if (do_resume)
phy_resume(phydev);
if (err < 0)
phy_error(phydev);
queue_delayed_work(system_power_efficient_wq, &phydev->state_queue,
PHY_STATE_TIME * HZ);
}
PHY状态变化规律
上电时状态变化:
PHY_READY -> PHY_UP -> PHY_AN -> PHY_RUNNING
拨出网线时状态变化:
PHY_RUNNING ->PHY_NOLINK
插上网线时状态变化:
PHY_NOLINK -> PHY_RUNNING
自动协商过程:
cpsw_ndo_open->cpsw_slave_open -> PHY_UP -> phy_start_aneg -> genphy_config_aneg -> genphy_config_advert -> genphy_restart_aneg -> PHY_AN -> PHY_NOLINK(串口打印Down) -> phy_aneg_done -> PHY_RUNNING(串口打印Up)
注:在AN后出现NOLINK状态,我猜是因为自动协商需要时间,此时间大于1秒,然后执行到状态机判断成NOLINK,然后判断是否完成自动协商,然后再到RUNNING状态。
注意:
调用phy_driver_register去注册驱动,这是phy驱动也会形成一个链表,这里之所以不是树而上面的设备成为树,是因为mii可能挂载在pci总线上,当然pci上可能有其它设备,这些设备和phy设备不在一个链表上,而是通过kobject链接管理的,对应的还有一个kset,kset其实是kobject的一个集合,相同的kobject对象会指向同一个kset,如USB鼠标、键盘就属于同一个kset集。上述的总线,设备,以及驱动(假设驱动已经编写好了,驱动中多半会有一个标示符,暂且将其看作为id,这个id指明了其支持的设备)内;假设不支持热插拔,那么启动时,系统就会扫描设备,并串联进设备树,当驱动注册(register时),驱动就会去设备树中,找id号和其对
应的相等的,如果找到,那么这两个就捆绑在一起了,通常为XXX_attcah函数,应用层对该设备的操作就变为调用驱动中对应的read、write、ioctl等。如果支持热插拔,比上面的就复杂了,因为驱动可能先于设备(总线)存在,所以当有新硬件连接时,内核会调用XXX_probe函数去探测,并注册设备,然后去驱动链表中查找驱动,如果找到,则attach。对其操作方法与上述一样。
运行ifconfig eth0 up命令的过程
进入分支状态机分支
case PHY_UP: //开启(ifconfig eth0 up)
needs_aneg = 1;
phydev->link_timeout = PHY_AN_TIMEOUT;
break;
相应处理
if (needs_aneg) //需要自动协商机制(例如ifconfig eth0 up就会调用)
err = phy_start_aneg(phydev); //开始自动配置
调用phy_start_aneg函数
int phy_start_aneg(struct phy_device *phydev)
{
int err;
mutex_lock(&phydev->lock);
if (AUTONEG_DISABLE == phydev->autoneg)
phy_sanitize_settings(phydev);
err = phydev->drv->config_aneg(phydev); //调用驱动的config_aneg方法,默认是genphy_config_aneg
if (err < 0)
goto out_unlock;
if (phydev->state != PHY_HALTED) { //调整修改PHY设备状态
if (AUTONEG_ENABLE == phydev->autoneg) {
phydev->state = PHY_AN;
phydev->link_timeout = PHY_AN_TIMEOUT;
}
else {
phydev->state = PHY_FORCING;
phydev->link_timeout = PHY_FORCE_TIMEOUT;
}
}
out_unlock:
mutex_unlock(&phydev->lock);
return err;
}
EXPORT_SYMBOL(phy_start_aneg);
调用默认的自动协商方法genphy_config_aneg
int genphy_config_aneg(struct phy_device *phydev)
{
int result;
if (AUTONEG_ENABLE != phydev->autoneg)
return genphy_setup_forced(phydev);
result = genphy_config_advert(phydev);
if (result < 0) /* error */
return result;
if (result == 0) {
int ctl = phy_read(phydev, MII_BMCR); //获取状态
if (ctl < 0)
return ctl;
if (!(ctl & BMCR_ANENABLE) || (ctl & BMCR_ISOLATE))
result = 1; /* do restart aneg */
}
if (result > 0)
result = genphy_restart_aneg(phydev); //重新开启自动协商机制
return result;
}
EXPORT_SYMBOL(genphy_config_aneg);
接着调用genphy_config_aneg
int genphy_restart_aneg(struct phy_device *phydev)
{
int ctl;
ctl = phy_read(phydev, MII_BMCR); //获取基本状态
if (ctl < 0)
return ctl;
ctl |= (BMCR_ANENABLE | BMCR_ANRESTART); //使能自动协商机制及支援重启
/* Don't isolate the PHY if we're negotiating */
ctl &= ~(BMCR_ISOLATE);
ctl = phy_write(phydev, MII_BMCR, ctl); //写命令
return ctl;
}
EXPORT_SYMBOL(genphy_restart_aneg);
针对PHY芯片RTL8201F的部分寄存器分析

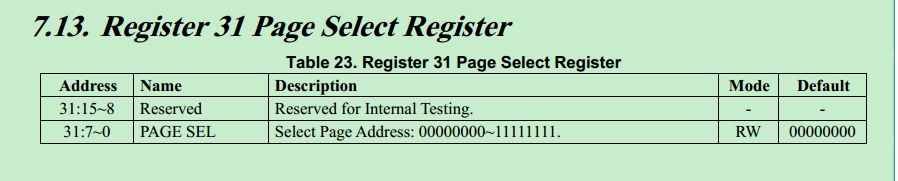


phy_write(phydev, 0x1f, 00000007);
phydev 是phy设备,0x1f是寄存器地址31的十六进制,00000007是第七页

LED定制寄存器,例如0x0088是对LED0和LED1定制,在第19个寄存器使能定制后,定制LED功能就会按照19寄存器的设置,或者后期更新的设置进行工作。
定制的含义就是把使能定制的作为ACT LED使用。

下面这个寄存器由第八章可以知道,改寄存器可以改变网口的speed,测试置1可以实现。
附录
:操作LED参考代码(原创咯)和RTL驱动代码



#if RTL8201F
phy_write(phydev, 0x1f, 0x00000007);
printk("<0>""____________17:%0x__18:%0x___19:%0x\n", phy_read(phydev, 0x11), phy_read(phydev, 0x12), phy_read(phydev, 0x13));
phy_write(phydev, 0x11, phy_read(phydev, 0x11) & 0xff00 |0x0080);
phy_write(phydev, 0x13, phy_read(phydev, 0x13) | 1<<3);
printk("<0>""____________17:%0x__18:%0x___19:%0x\n", phy_read(phydev, 0x11), phy_read(phydev, 0x12), phy_read(phydev, 0x13));
phy_write(phydev, 0x1f, 0x00000000);
#endif
针对LED的修改不要放在网卡里,我们操作PHY的LED的寄存器数据LED定制,对不同的芯片寄存器可能不一样,所以尽量把手册中扩展寄存器操作放到PHY芯片所在的设备驱动里
* drivers/net/phy/realtek.c
*
* Driver for Realtek PHYs
*
* Author: Johnson Leung <r58129@freescale.com>
*
* Copyright (c) 2004 Freescale Semiconductor, Inc.
*
* This program is free software; you can redistribute it and/or modify it
* under the terms of the GNU General Public License as published by the
* Free Software Foundation; either version 2 of the License, or (at your
* option) any later version.
*
*/
#include <linux/phy.h>
#include <linux/module.h>
#define RTL821X 0
//#define RTL821x_PHYSR 0x11
//#define RTL821x_PHYSR_DUPLEX 0x2000
//#define RTL821x_PHYSR_SPEED 0xc000
/* 第 0 页,寄存器 30,中断指示,信噪显示寄存器 */
#define RTL8201F_ISR 0x1e
/* 第 0 页,寄存器 31,页选择寄存器 */
#define RTL8201F_PSR 0x1f
/* 第 7 页,寄存器 19,中断,WOL 使能,LED 功能寄存器 */
#define RTL8201F_IER 0x13
#define RTL821x_INER 0x12
#define RTL821x_INER_INIT 0x6400
#define RTL821x_INSR 0x13
MODULE_DESCRIPTION("Realtek PHY driver");
MODULE_AUTHOR("Johnson Leung");
MODULE_LICENSE("GPL");
/* RTL8201F ACK 中断 */
static int rtl8201f_ack_interrupt(struct phy_device *phydev)
{
int err;
err = phy_read(phydev, RTL8201F_ISR);
return (err < 0) ? err : 0;
}
static int rtl821x_ack_interrupt(struct phy_device *phydev)
{
int err;
err = phy_read(phydev, RTL821x_INSR);
return (err < 0) ? err : 0;
}
/* RTL8201F 中断配置 */
static int rtl8201f_config_intr(struct phy_device *phydev)
{
int err;
phy_write(phydev, RTL8201F_PSR, 0x0007); /* select page 7 */
if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
err = phy_write(phydev, RTL8201F_IER, 0x3800 |
phy_read(phydev, RTL8201F_IER));
else
err = phy_write(phydev, RTL8201F_IER, ~0x3800 &
phy_read(phydev, RTL8201F_IER));
phy_write(phydev, 0x11, phy_read(phydev, 0x11) | 1<<3);
phy_write(phydev, 0x13, phy_read(phydev, 0x13) | 1<<3);
phy_write(phydev, RTL8201F_PSR, 0x0000); /* back to page 0 */
return err;
}
static int rtl821x_config_intr(struct phy_device *phydev)
{
int err;
if (phydev->interrupts == PHY_INTERRUPT_ENABLED)
err = phy_write(phydev, RTL821x_INER,
RTL821x_INER_INIT);
else
err = phy_write(phydev, RTL821x_INER, 0);
return err;
}
/* RTL8201F 结构体 */
static struct phy_driver rtl8201f_driver = {
.phy_id = 0x001cc816,
.name = "RTL8201F 10/100Mbps Ethernet",
.phy_id_mask = 0x001fffff,
.features = PHY_BASIC_FEATURES,
.flags = PHY_HAS_INTERRUPT,
.config_aneg = &genphy_config_aneg,
.read_status = &genphy_read_status,
.ack_interrupt = &rtl8201f_ack_interrupt,
.config_intr = &rtl8201f_config_intr,
.driver = { .owner = THIS_MODULE,},
};
/* RTL8211B */
static struct phy_driver rtl821x_driver = {
.phy_id = 0x001cc912,
.name = "RTL821x Gigabit Ethernet",
.phy_id_mask = 0x001fffff,
.features = PHY_GBIT_FEATURES,
.flags = PHY_HAS_INTERRUPT,
.config_aneg = &genphy_config_aneg,
.read_status = &genphy_read_status,
.ack_interrupt = &rtl821x_ack_interrupt,
.config_intr = &rtl821x_config_intr,
.driver = { .owner = THIS_MODULE,},
};
static int __init realtek_init(void)
{
int ret;
ret = phy_driver_register(&rtl8201f_driver);
if(0 != ret)
return ret;
#if RTL821X
ret = phy_driver_register(&rtl821x_driver);
if(0 != ret)
return ret;
#endif
return ret;
}
static void __exit realtek_exit(void)
{
phy_driver_unregister(&rtl8201f_driver);
#if RTL821X
phy_driver_unregister(&rtl821x_driver);
#endif
}
module_init(realtek_init);
module_exit(realtek_exit);
static struct mdio_device_id __maybe_unused realtek_tbl[] = {
{ 0x001cc816, 0x001fffff }, /* RTL8201F */
#if RTL821X
{ 0x001cc912, 0x001fffff },
#endif
{ }
};
MODULE_DEVICE_TABLE(mdio, realtek_tbl);
相关博客:
原文地址:http://blog.chinaunix.net/uid-29287950-id-5566124.html
RMII网络的系统固件制作说明书
-
修改配置文件并使配置文件生效
a. make ARCH=arm CROSS_COMPILE=arm-hisiv100nptl-linux- menuconfig
b. 修改项
Device Drivers —>
[
] Network device support —>
[
] Ethernet (10 or 100Mbit) —>
<*> hieth(switch fabric) family network device support —>
(1) hieth mii/rmii mode for up port (mii:0/rmii:1)
(1) hieth mii/rmii mode for down port (mii:0/rmii:1) -
修改驱动中网络时钟
a. 修改文件
linux-3.0.y/drivers/net/hieth-sf/net.c
b. 修改点
在函数static void phy_quirk(struct hieth_mdio_local
mdio, int phyaddr)中加入以下内容
/
PHY-8201 */
if ((phy_id & 0xFFFFFFF0) == 0x1cc810)
{
if (CONFIG_HIETH_MII_RMII_MODE_U == 1) //1 means rmii mode
{
hieth_mdio_write(mdio, phyaddr, 0x1F, 0x7);
reg = hieth_mdio_read(mdio, phyaddr, 0x10);
reg |= (1 << 12);
hieth_mdio_write(mdio, phyaddr, 0x10, reg);
hieth_mdio_write(mdio, phyaddr, 0x1F, 0x0);
}
}
3. 加入LED闪烁代码
a. 修改文件
drivers/net/hieth-sf/sys-3518.c
b. 修改项
在该文件尾加入以下函数
void config_led_shine(void)
{
#define IO_MDIO_RWCTRL IO_ADDRESS(CONFIG_HIETH_IOBASE + MDIO_RWCTRL)
#define tmp_mdio_ready() (readl(IO_MDIO_RWCTRL) & (0x1 << 15))
unsigned int reg_value = 0;
/* select page 7
/
do {
reg_value = 0x0007215f; //配置LED的寄存器在page7
writel(reg_value, IO_MDIO_RWCTRL);
udelay(10);
} while (!tmp_mdio_ready());
/
enable LED modify function
/
do {
reg_value = 0xc00c2153; //写phy的19号寄存器,配置各LED功能:00=LED0:ACTall;LED1:LINK100
writel(reg_value, IO_MDIO_RWCTRL);
udelay(10);
} while (!tmp_mdio_ready());
/
set green LED shine all the while when link up,
-
yellow LED blink when data coming
*/
do {
reg_value = 0x00382151; //写phy的17号寄存器,配置LED动作:一个link即亮,一个有数据即闪
writel(reg_value, IO_MDIO_RWCTRL);
udelay(10);
} while (!tmp_mdio_ready());
return;
}
c. 修改文件
drivers/net/hieth-sf/sys.c
d. 修改项
在void hieth_sys_init(void)函数中加入以下行
hieth_reset(0); //前一行
86 config_led_shine(); //加入该行
revise_led_shine(); //后一行
4. 编译
a. make ARCH=arm CROSS_COMPILE=arm-hisiv100nptl-linux- uImage
5. 文件
a. 编译成功后会生成文件arch/arm/boot/zImage(最终系统文件,3M多)