文章目录
0.视频演示
智能车自主导航
1.智能车环境,空间,资源准备
a.初始化
mkdir -p ~/ qianRuShi/racecar_ws/src
cd qianRuShi/racecar_ws/src
catkin_init_workspace

b.克隆 racecar 源代码包,并编译
git clone https://github.com/xmy0916/racecar.git
cd ..
catkin_make
(1)遇到问题:Could NOT find driver_base_DIR
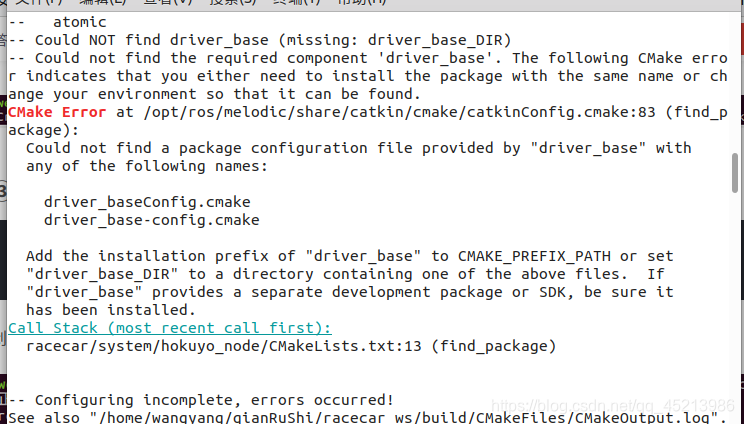
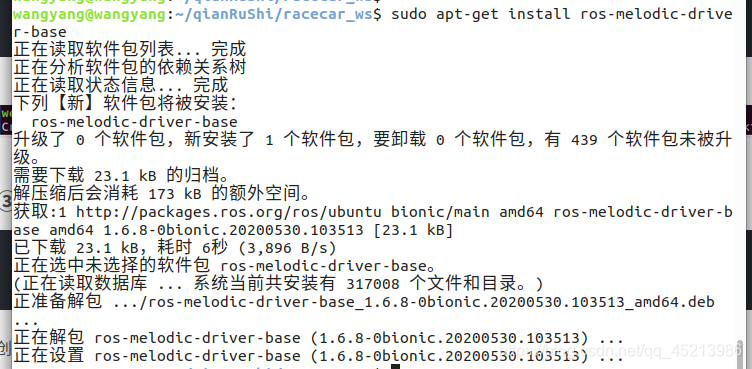
解决方案:更新apt-get,下载它
sudo apt-get update
sudo apt-get install ros-melodic-driver-base
-
这里需要注意,如果更新慢的话,请更换国内源
参考链接
- 我的是Ubuntu18.04,所以是melodic,ros-你的版本-driver-base
-
缺少其它包的话,相同道理,自行下载。
(2)遇到问题:Could NOT find OpenCV (missing: OpenCV_DIR)
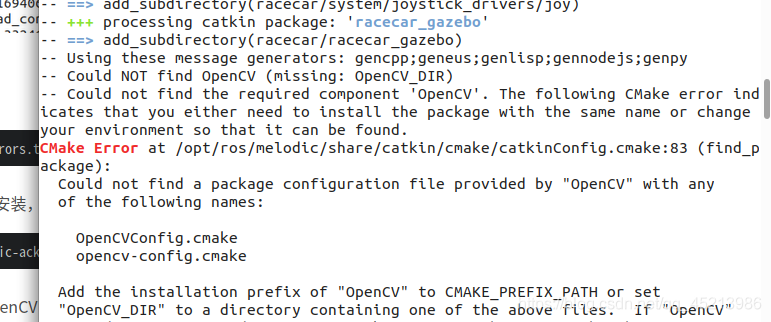
解决方案:
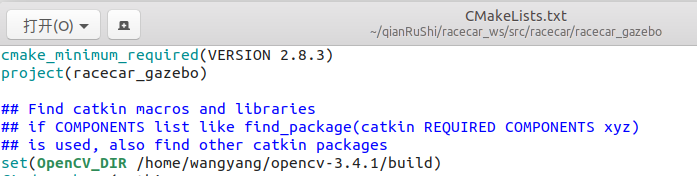
查看你的opencv路径
locate OpenCVConfig.cmake
更改 racecar_gazebo/CMakeLists.txt如下:(截图的最后一行)
set(OpenCV_DIR /home/wangyang/opencv-3.4.1/build)
(3)随带把环境变量添加了
gedit ~/.bashrc
根据自己的路径,在末尾添加工作空间的环境变量,并保存:
source ~/qianRuShi/racecar_ws/devel/setup.bash
再次运行
source ~/.bashrc
2.gazebo查看原环境
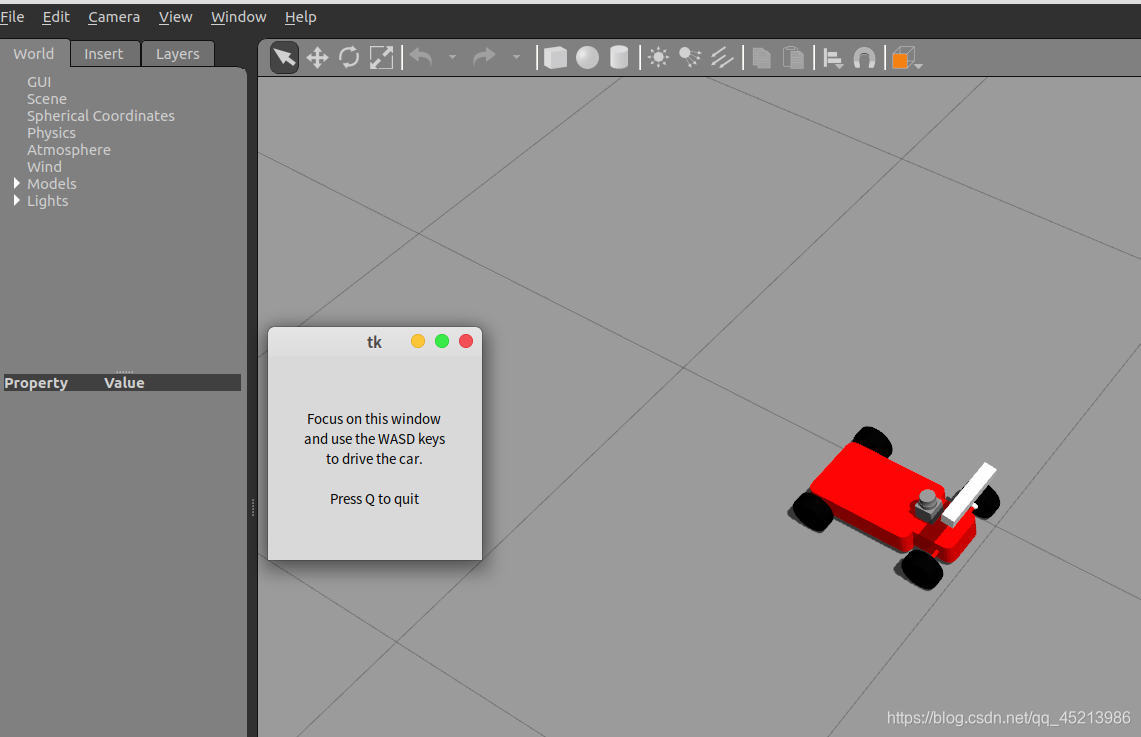
a.看一看小车
roslaunch racecar_gazebo racecar.launch
关闭后
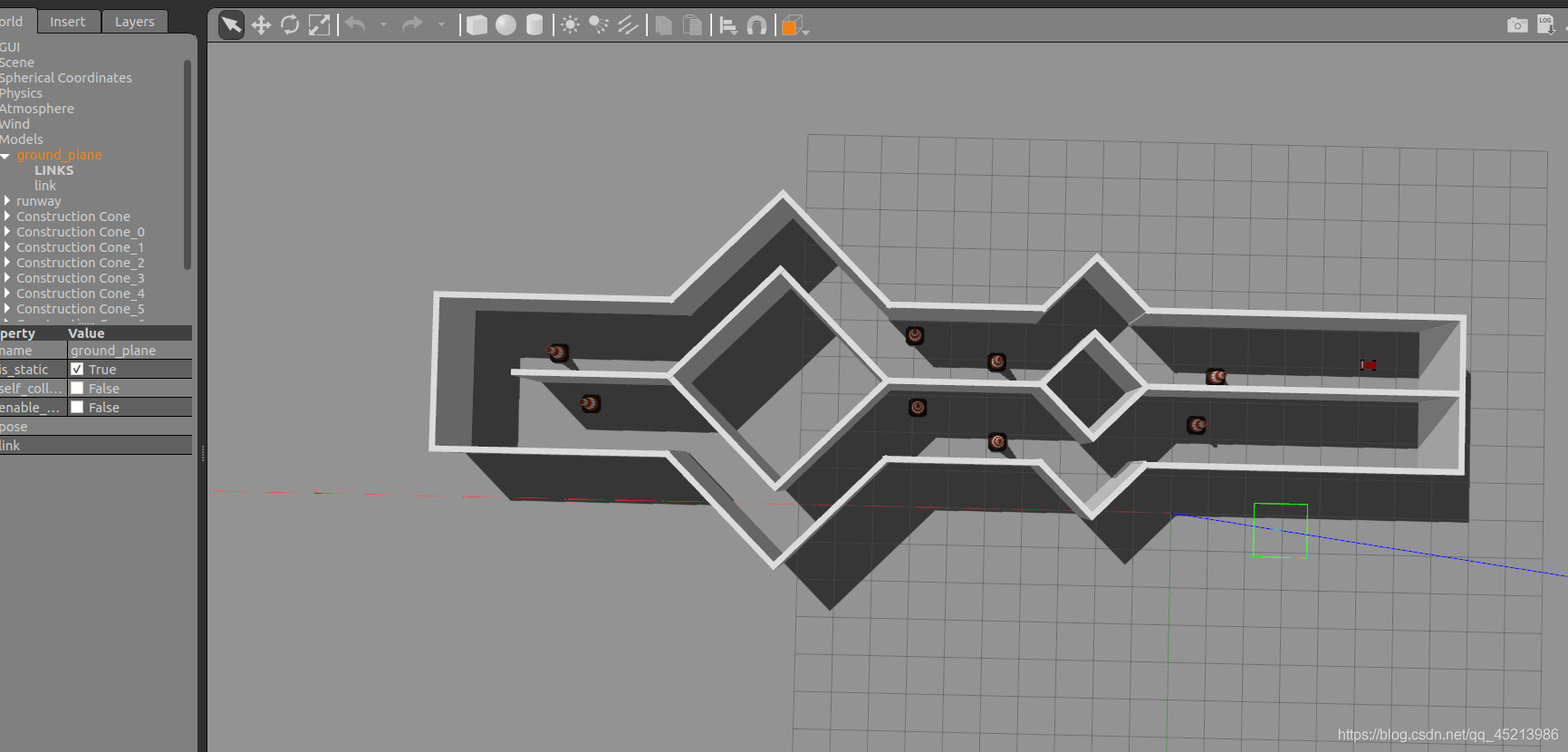
b.看一看地图
roslaunch racecar_gazebo racecar_runway.launch
效果如下:
3.手动导航,开启rviz画图
新建终端
roslaunch racecar_gazebo slam_gmapping.launch
a.遇到问题:ImportError: No module named msg
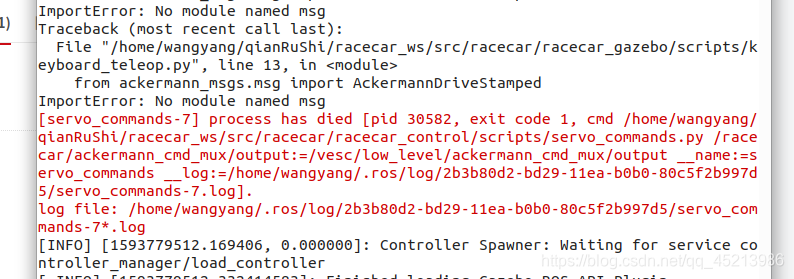
解决方案:镜像下载就行
pip install msg -i https://mirrors.tuna.tsinghua.edu.cn/pypi/web/simple/
好吧,后来发现不是在python安装,如下安装:
sudo apt-get install ros-melodic-ackermann-msgs
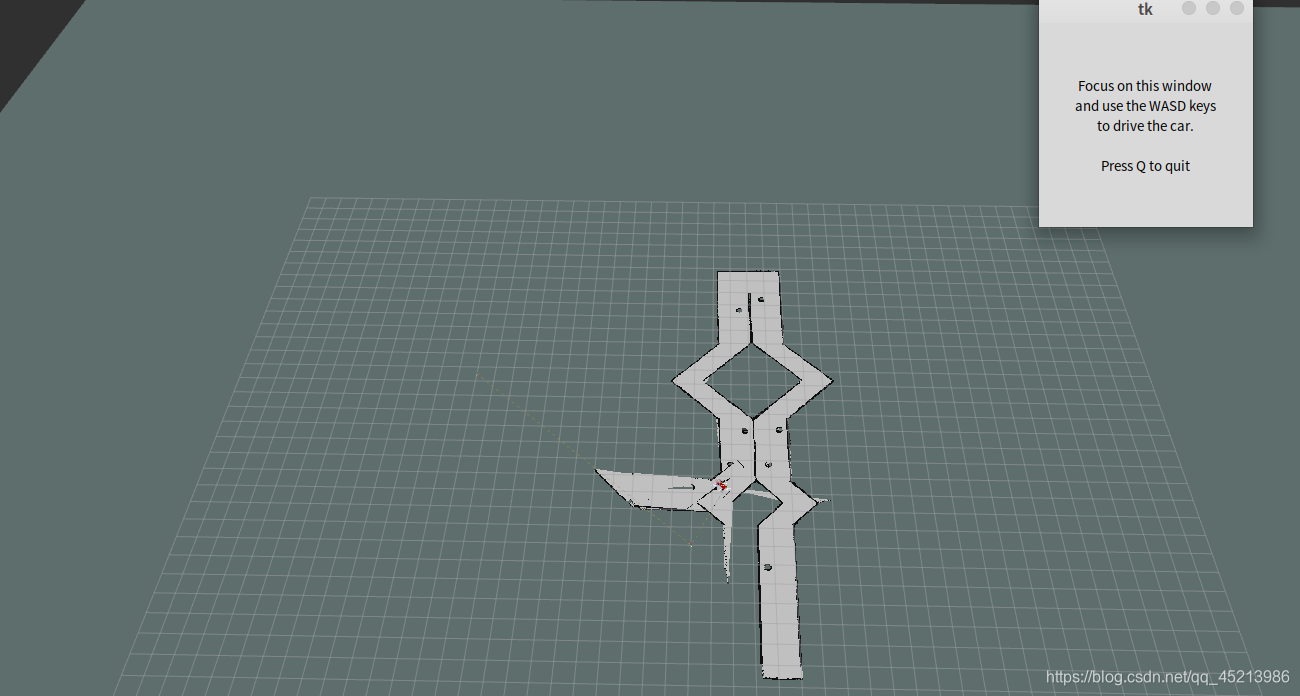
b.将鼠标焦点放在tk弹窗上,可以进行移动操作
在racecar_ws/src/racecar/racecar_gazebo/scripts的keyboard_teleop.py可以看见
这里还容易翻车,大家注意了,开慢点,翻车了就重新来过
c.翻车,重启绘图
roslaunch racecar_gazebo racecar_runway.launch
roslaunch racecar_gazebo slam_gmapping.launch
好吧,我翻车两次了,大致样子是这样的:
地图:
小车:
d.保存地图
你要是顺利完成地图,可以保存起来,后面自主导航用自己的(我尝试过用他的地图,但是莫名其妙的,图出来不了):
保存到racecar_gazebo/map吧,就不用了在移动了
cd racecar/racecar_gazebo/map
rosrun map_server map_saver -f map_racecar
4.
原赛道的小车自主导航
可关闭上面的rviz进程了,然后
修改racecar_runway_navigation.launch文件,更改地图:
a.启动导航
roslaunch racecar_gazebo racecar_runway_navigation.launch
b.遇到问题:Failed to create the teb_local_planner…
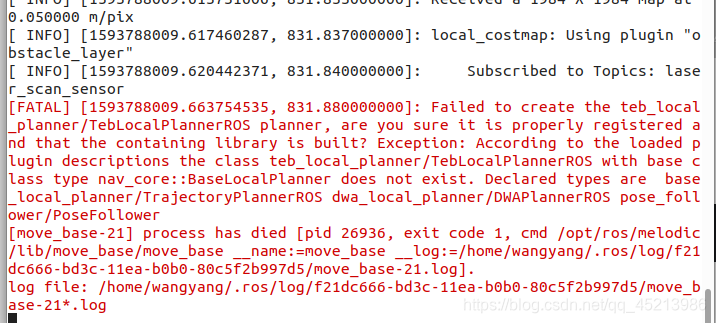
解决方案:
sudo apt-get install ros-melodic-teb-local-planner
c.启动rviz
roslaunch racecar_gazebo racecar_rviz.launch
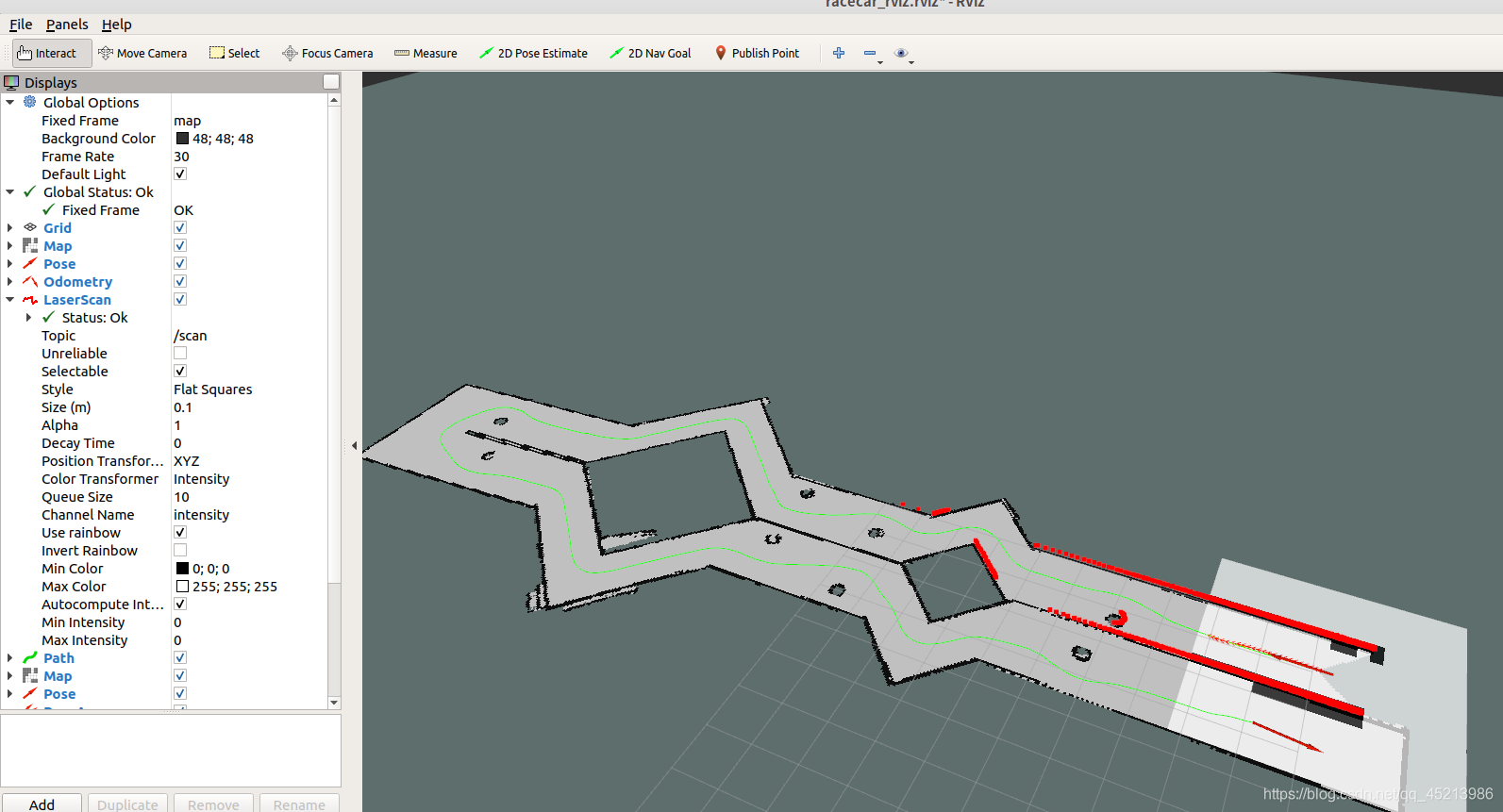
d.点击 2D Nav Goal,设置目标位置
e.新建终端,开启自动导航
rosrun racecar_gazebo path_pursuit.py
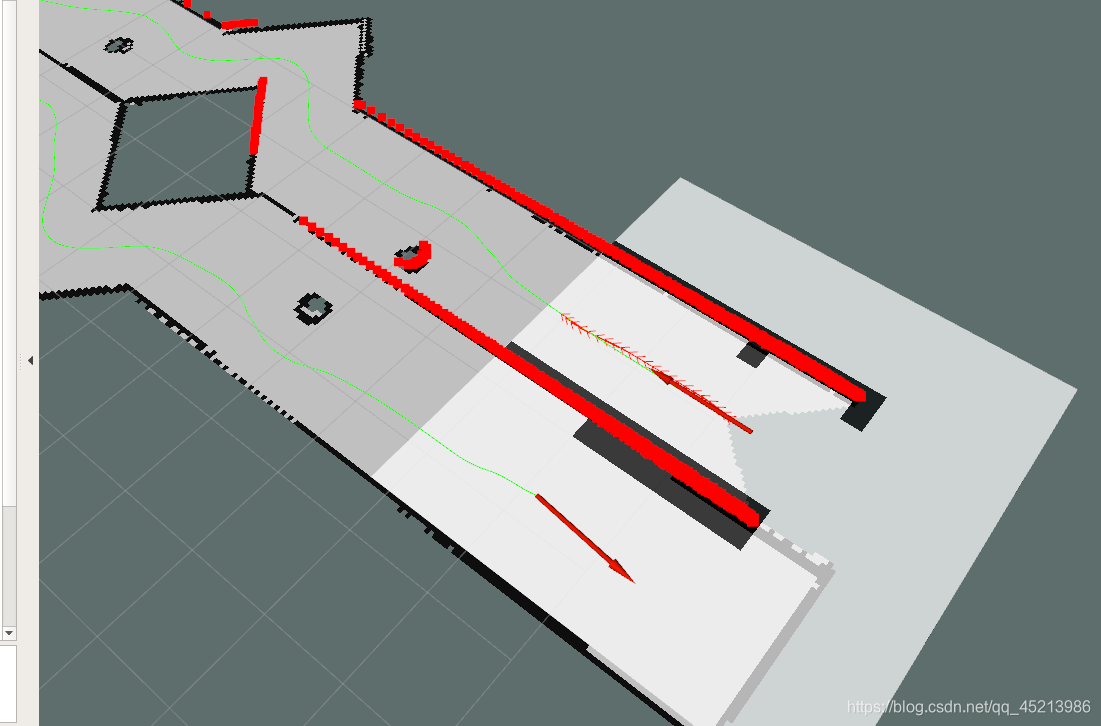
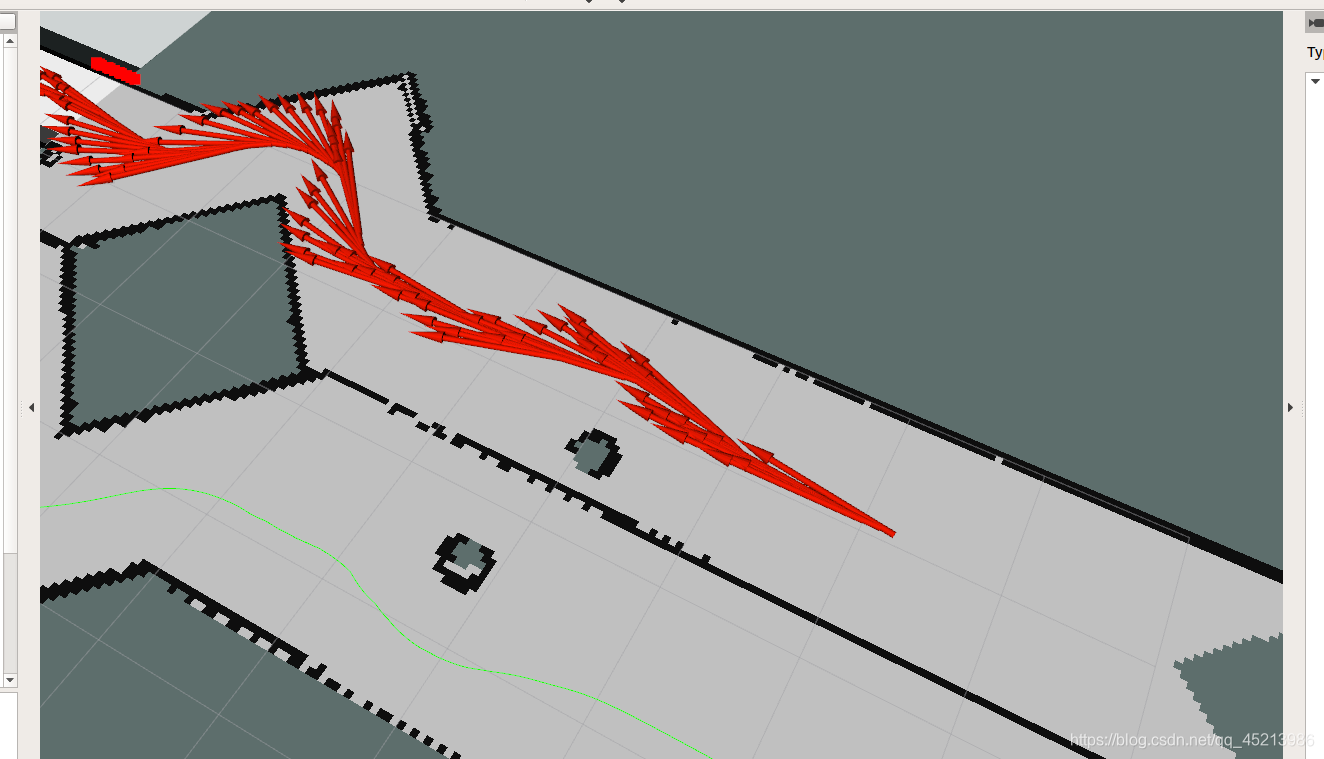
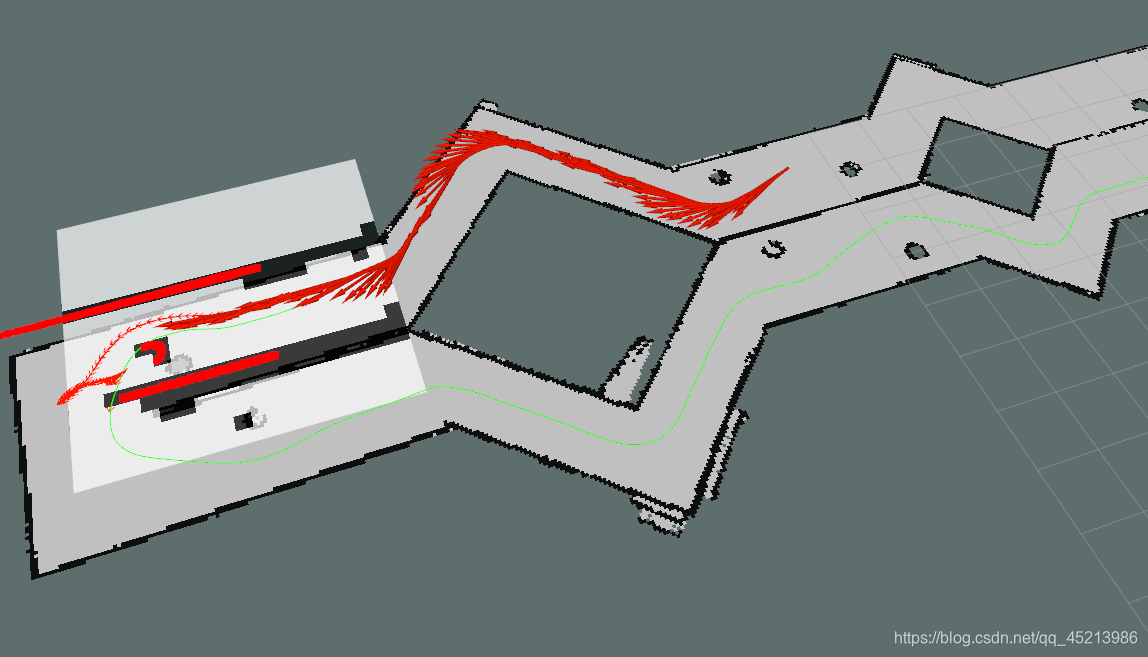
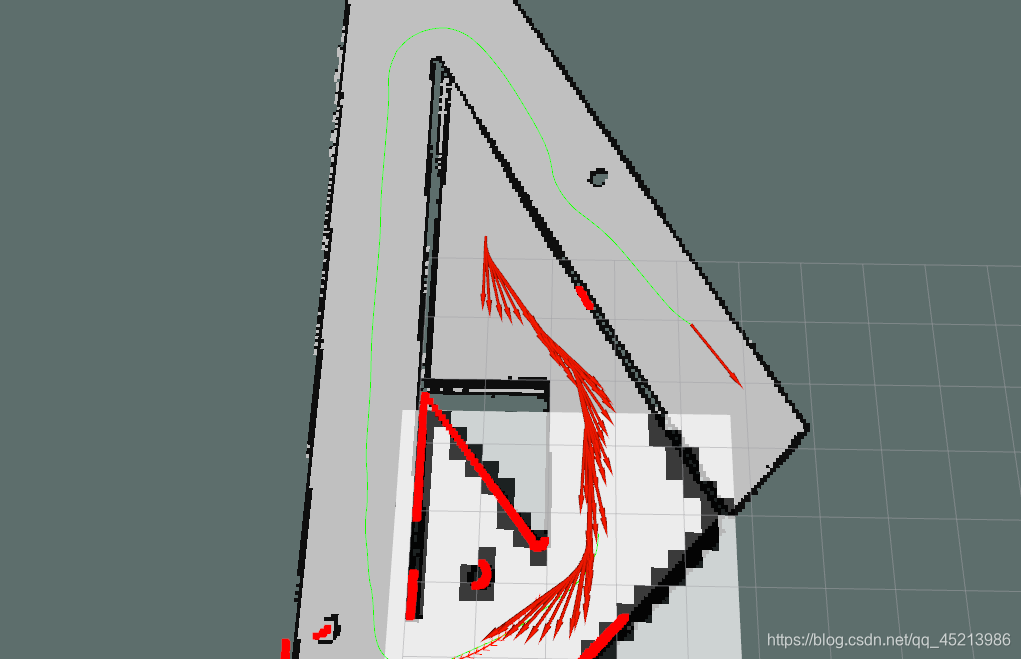
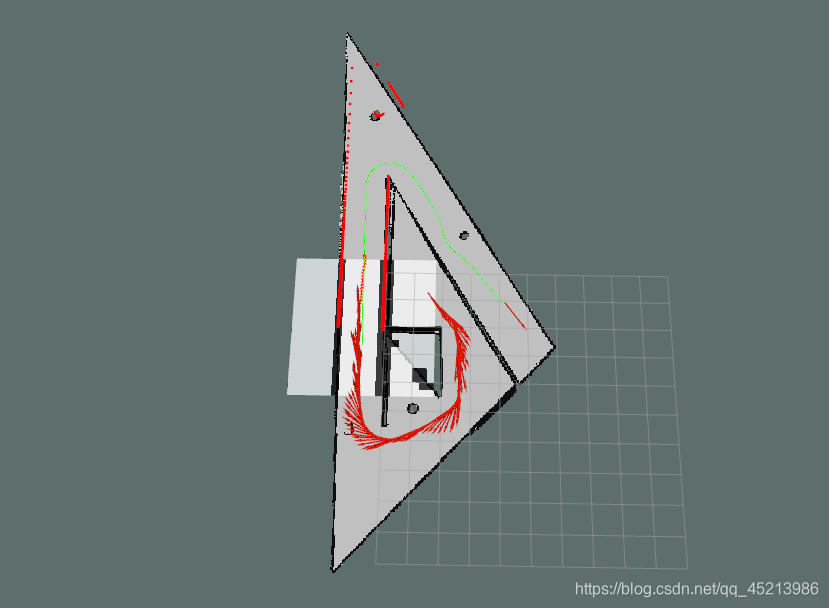
过程图:
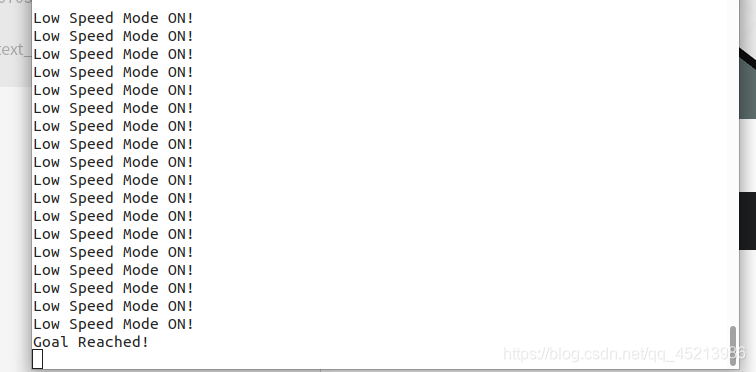
终端的显示:
5.构建自己的环境模型
a.gazebo构建自己的模型
我原本准备使用的我以前构建的模型,如何创建,请自行百度——
gazebo构建模型
发现被我删了,于是自己又搞了一个。
之前的终端都可以ctrl+c了。
b.运行小车模型
roslaunch racecar_gazebo racecar.launch
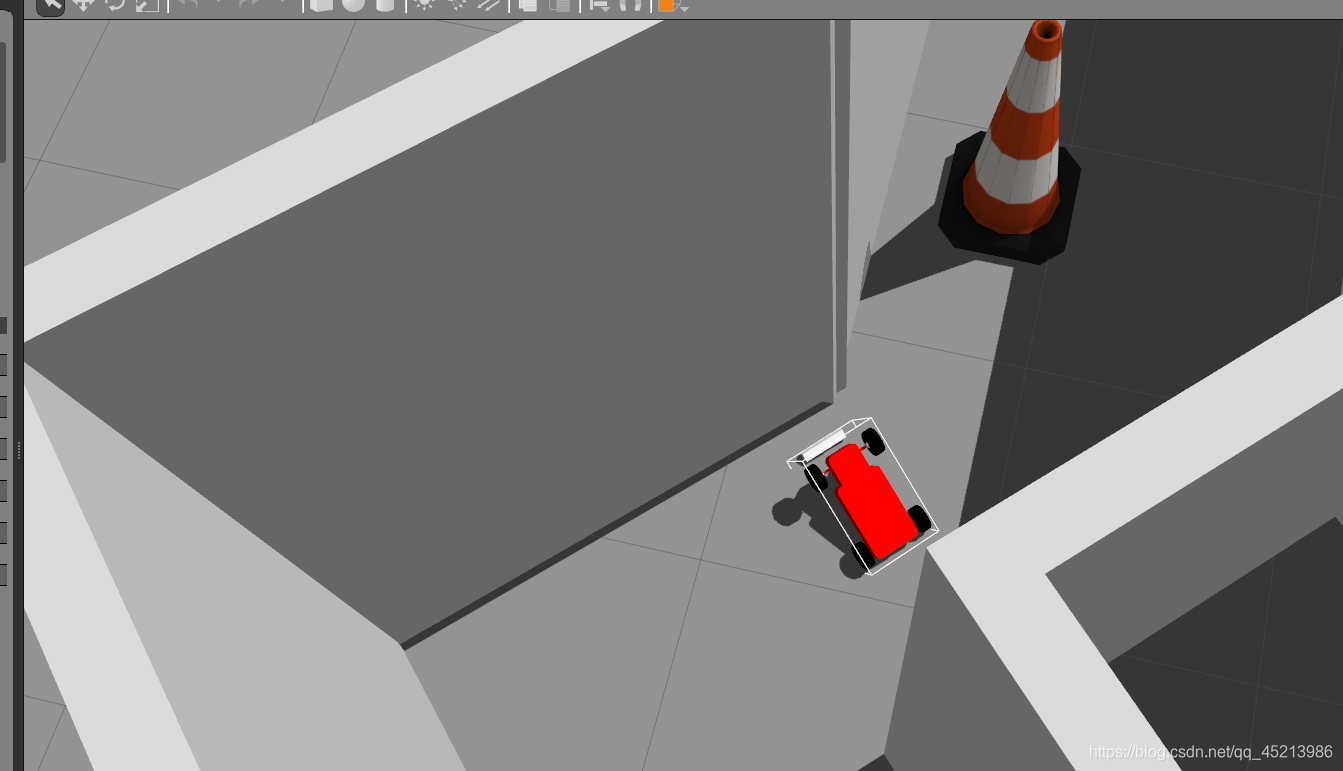
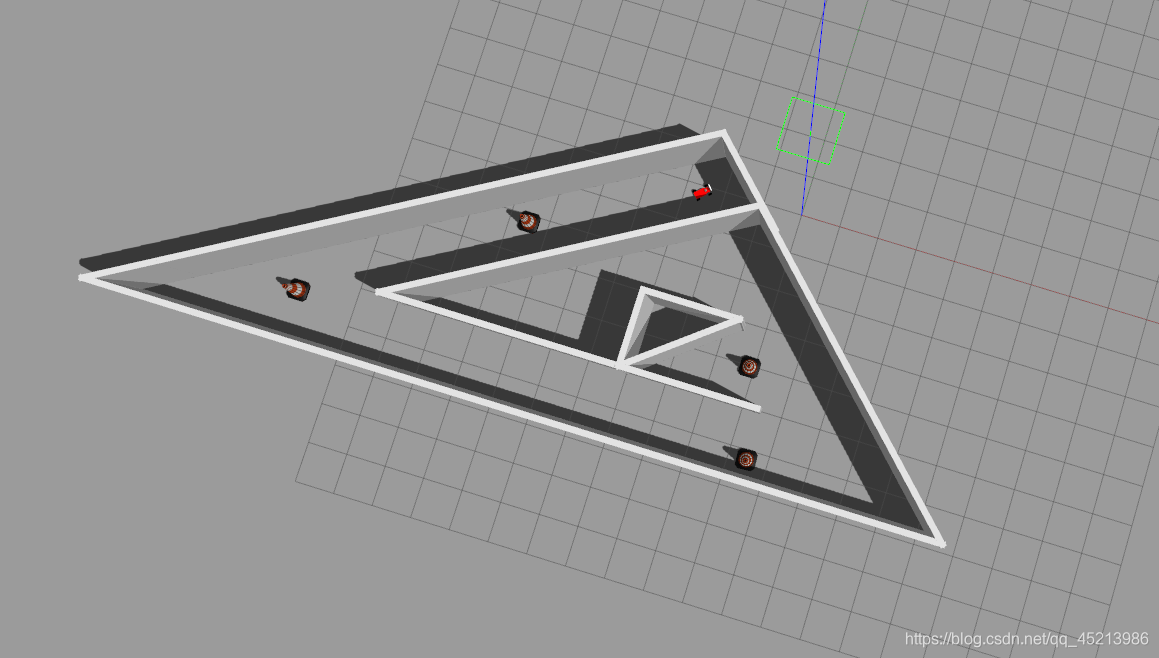
c.加入自己的模型,设置一些障碍物
然后点击左侧的insert,将自己的模型拖进
再加入一些障碍物 Construction Cone(这里以前导入的模型库,没有自行百度,或者不要障碍物就是)
选择File->Save World As,保存到racecar/racecar_gazebo/worlds下:

d.新建myWorld.launch
cd racecar/racecar_gazebo/launch
sudo gedit myWorld.launch
添加下列代码
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="myWorld"/>
</include>
</launch>
6.
自己绘制赛道的小车自主导航
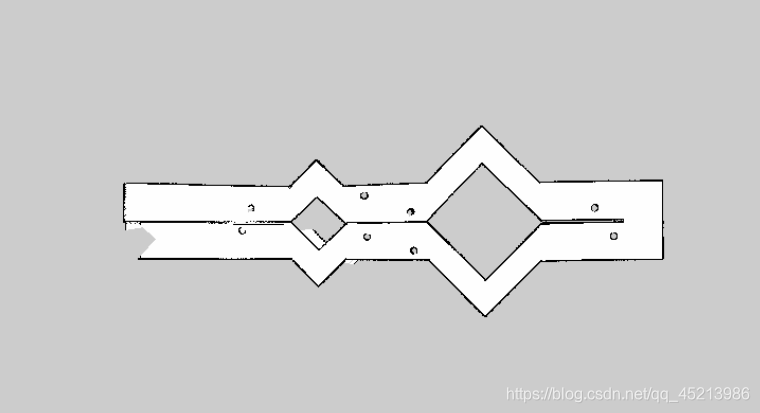
a.制图
重复上面的步骤,终端运行
roslaunch racecar_gazebo myWorld.launch
新建终端运行
roslaunch racecar_gazebo slam_gmapping.launch
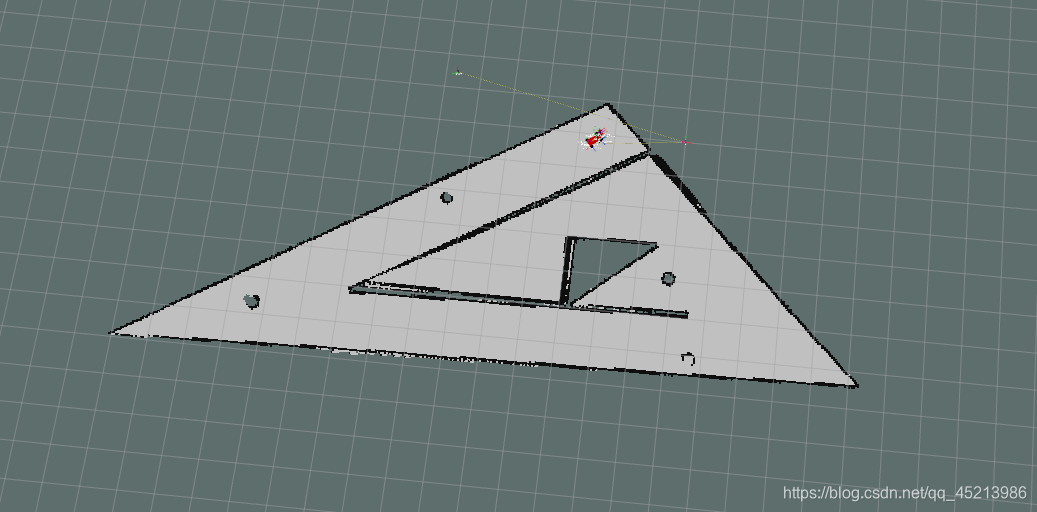
同上,移动小车,绘制地图得到:
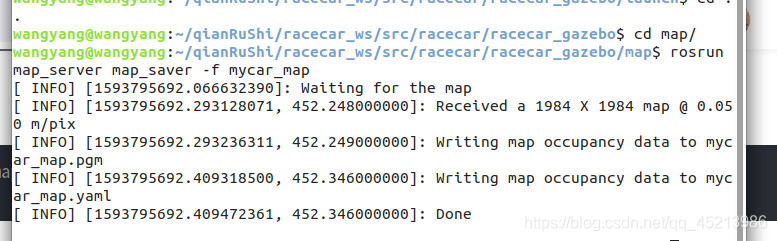
b.保存地图
cd racecar_ws/src/racecar/racecar_gazebo/map
rosrun map_server map_saver -f mycar_map
c.自主导航
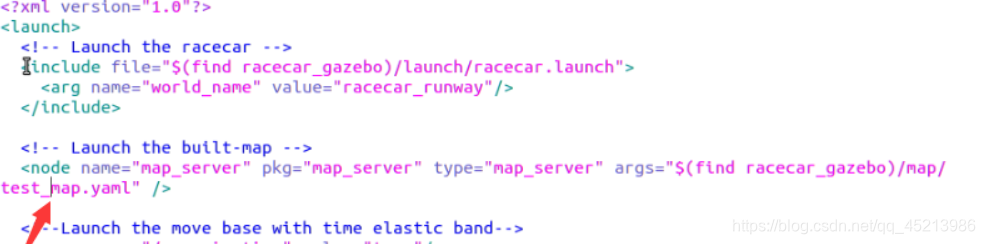
(1)创建autocar.launch文件
在racecar/racecar_gazebo/launch/下
gedit autocar.launch
添加:
<?xml version="1.0"?>
<launch>
<!-- Launch the racecar -->
<include file="$(find racecar_gazebo)/launch/racecar.launch">
<arg name="world_name" value="myworld2"/>
</include>
<!-- Launch the built-map -->
<node name="map_server" pkg="map_server" type="map_server" args="$(find racecar_gazebo)/map/mycar_map.yaml" />
<!--Launch the move base with time elastic band-->
<param name="/use_sim_time" value="true"/>
<node pkg="move_base" type="move_base" respawn="false" name="move_base" output="screen">
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="global_costmap" />
<rosparam file="$(find racecar_gazebo)/config/costmap_common_params.yaml" command="load" ns="local_costmap" />
<rosparam file="$(find racecar_gazebo)/config/local_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/global_costmap_params.yaml" command="load" />
<rosparam file="$(find racecar_gazebo)/config/teb_local_planner_params.yaml" command="load" />
<param name="base_global_planner" value="global_planner/GlobalPlanner" />
<param name="planner_frequency" value="0.01" />
<param name="planner_patience" value="5.0" />
<!--param name="use_dijkstra" value="false" /-->
<param name="base_local_planner" value="teb_local_planner/TebLocalPlannerROS" />
<param name="controller_frequency" value="5.0" />
<param name="controller_patience" value="15.0" />
<param name="clearing_rotation_allowed" value="false" />
</node>
</launch>
前面的终端可以关了
(2)两个终端分别运行
roslaunch racecar_gazebo autocar.launch
roslaunch racecar_gazebo racecar_rviz.launch
(3)2D Nav Goal设置目标
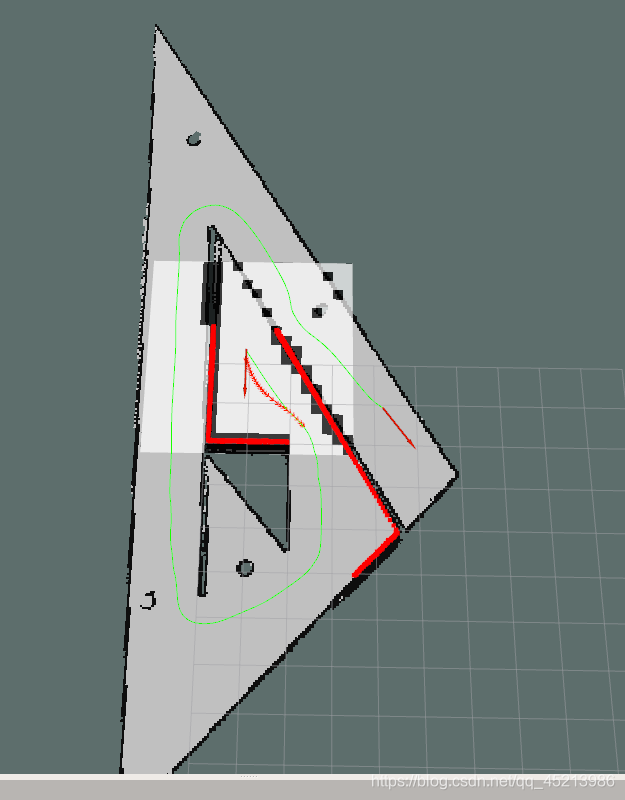
(4)运行运动脚本
rosrun racecar_gazebo path_pursuit.py
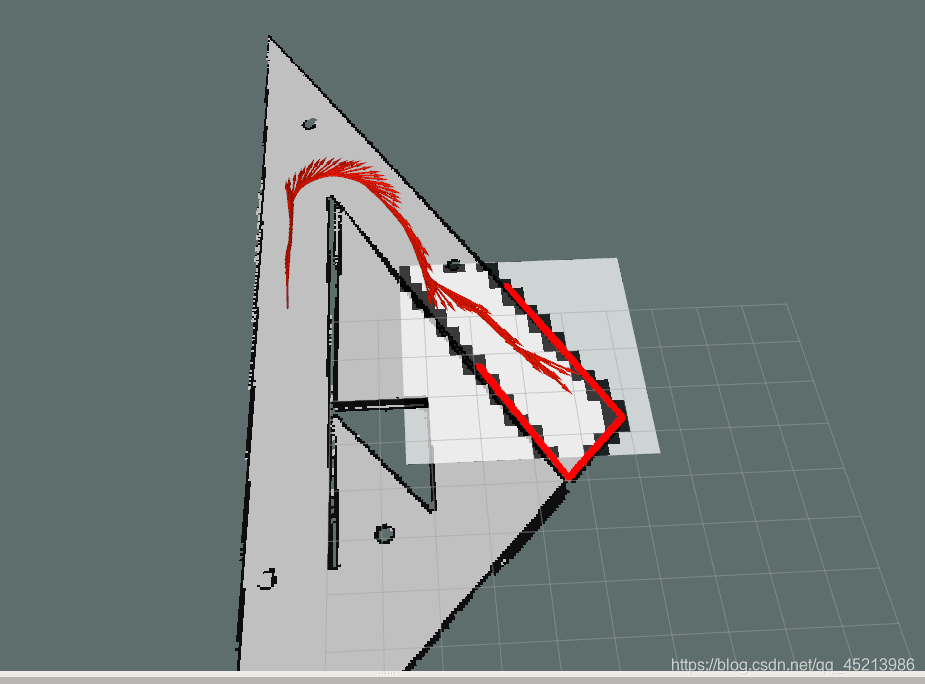
d.运行过程
至此包括一些扩展所有都已经全部完成,
7.总结
过程中,遇到了不少问题,但是好在github的源码地址有
解决方案
,在过程中,可能会有许多网络问题,如github资源下载慢,请参考我的另外一篇文章
三步解决github下载慢的问题
,另外,apt-get下载慢的话,也自己更换源,阿里,清华的都可以,
参考这里
。运行中途,小车容易翻车,开车慢点所以,不然要搞很久。更换地图,更换launch文件,一定记得修改相关的文件设置。