**
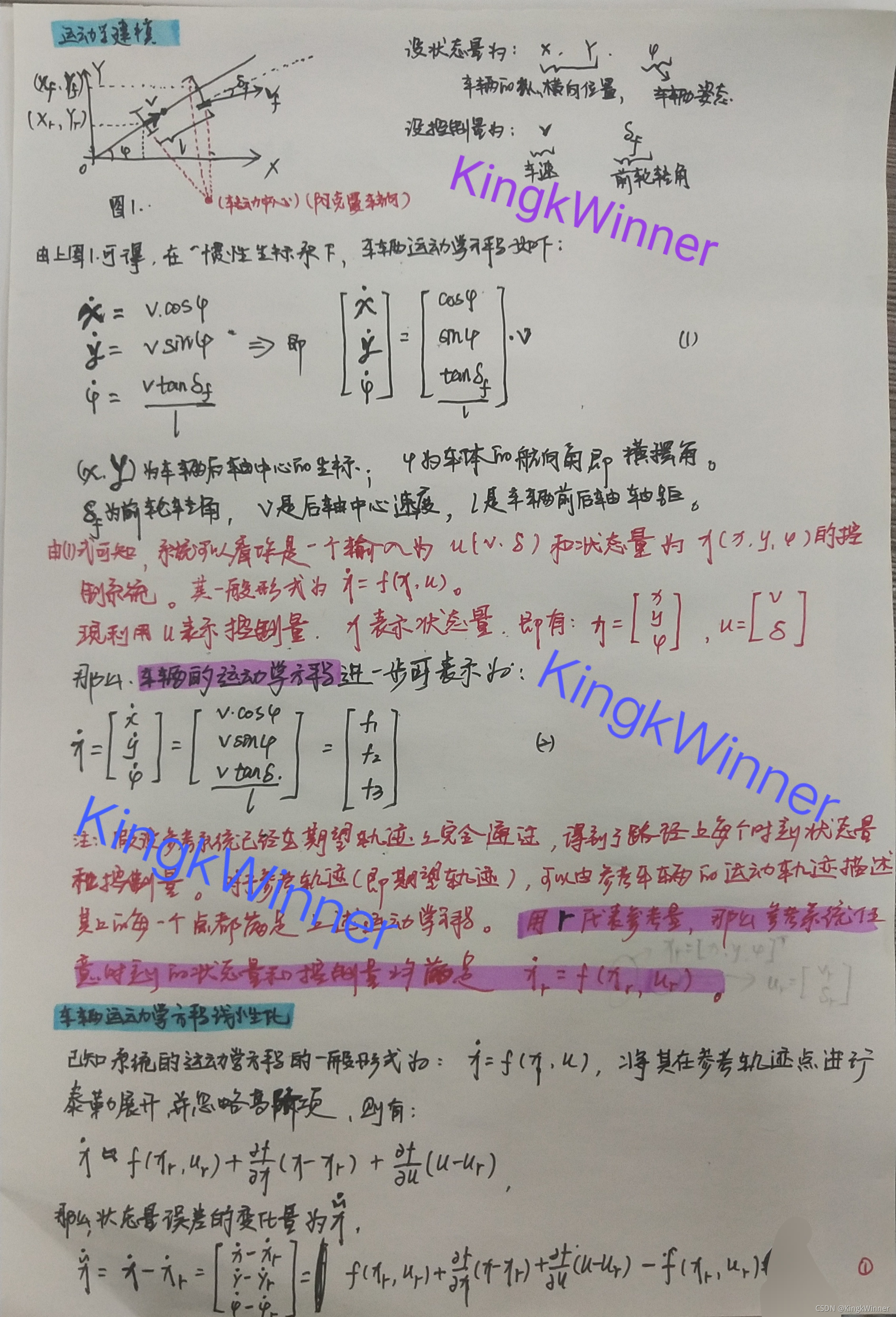
运动学建模
**
本节详细介绍基于运动学模型的轨迹跟踪控制算法的
运动学建模
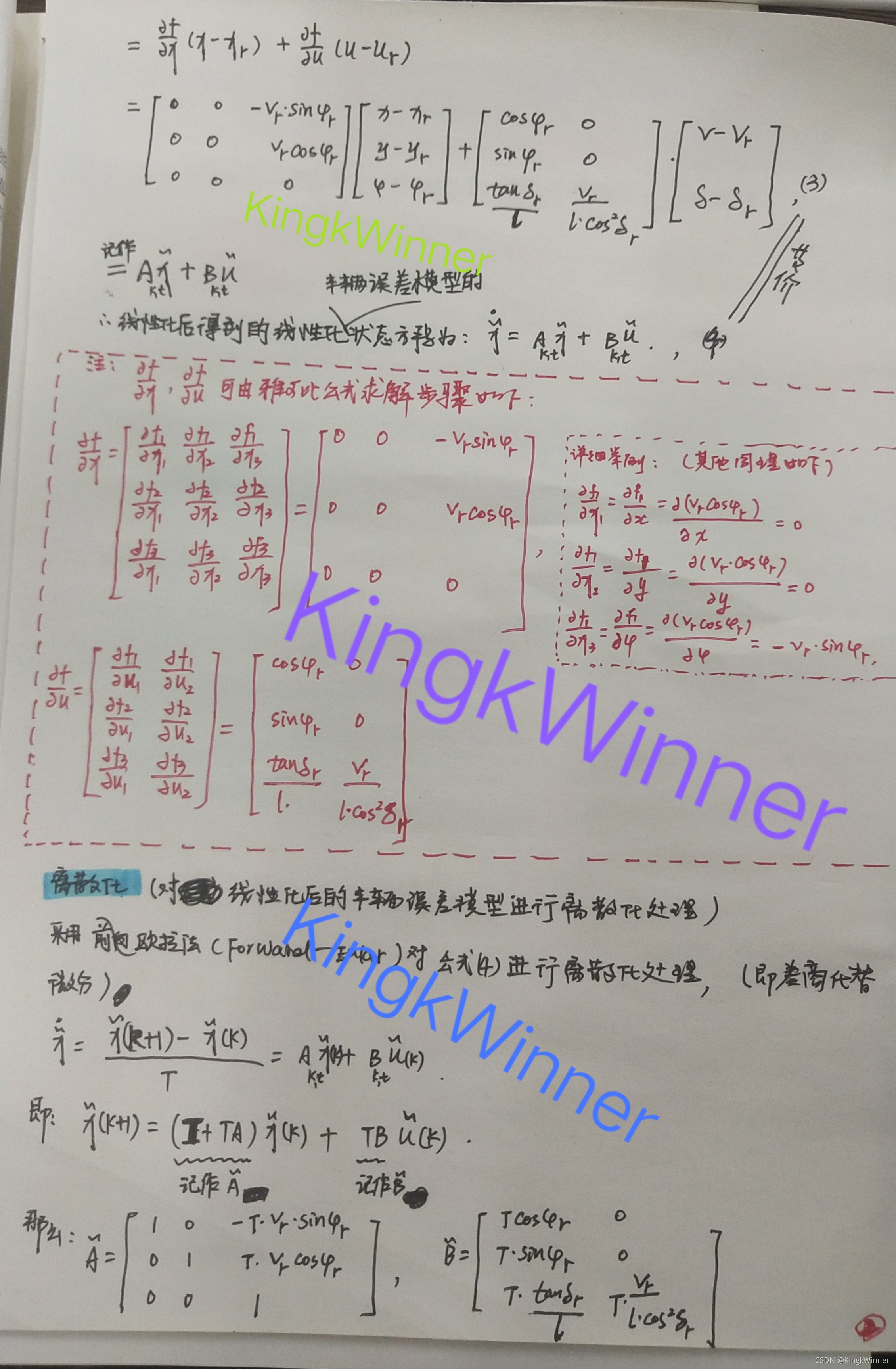
关键字:运动学方程,状态量,控制量,控制量增量,
系统预测输出表达式,状态空间方程,连续化,离散化,
线性化车辆误差模型,模型预测控制器,泰勒展开
码字不便,现以手稿形式展现!
(
创作不易,转载请注明出处——KingkWinner
)
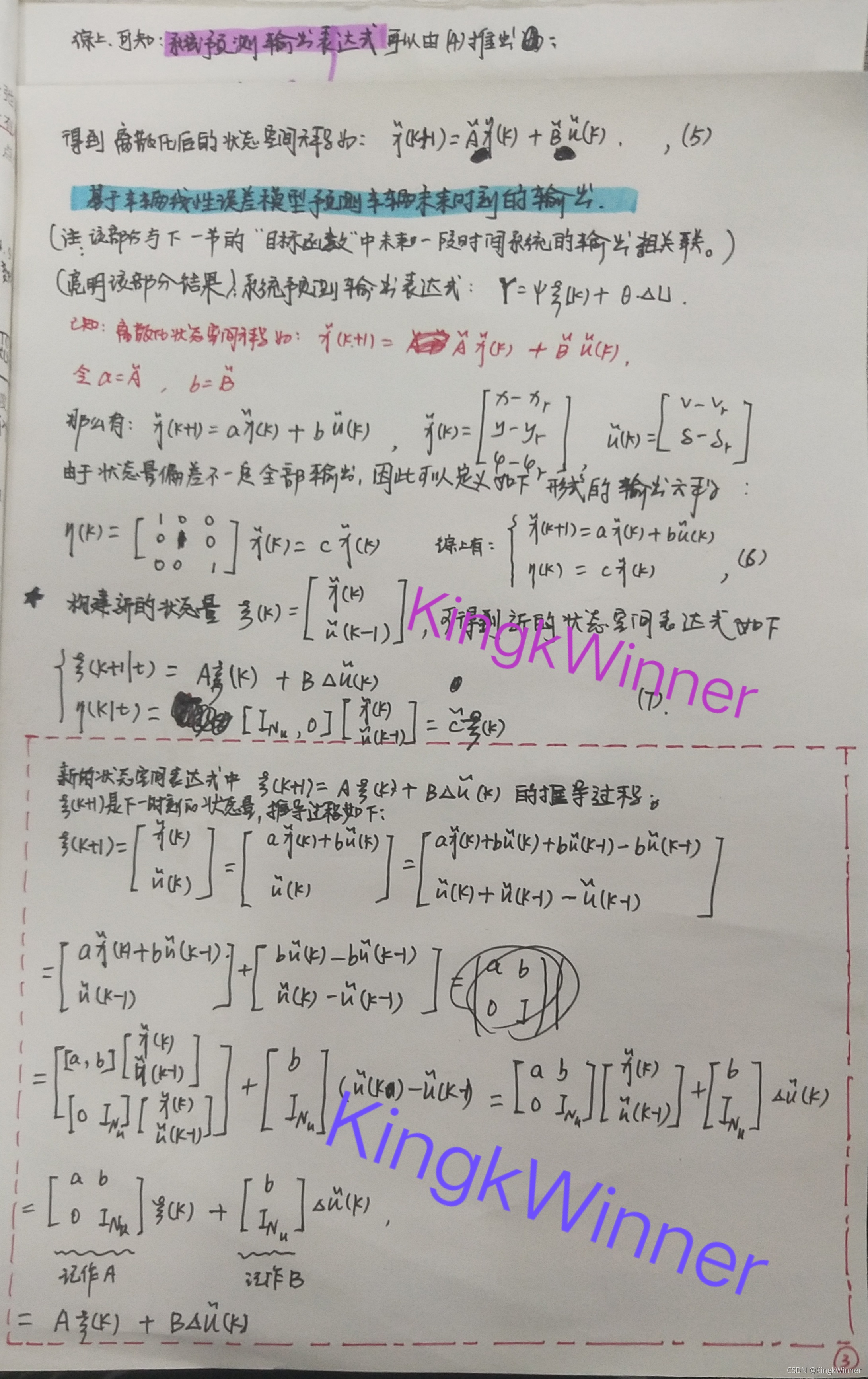
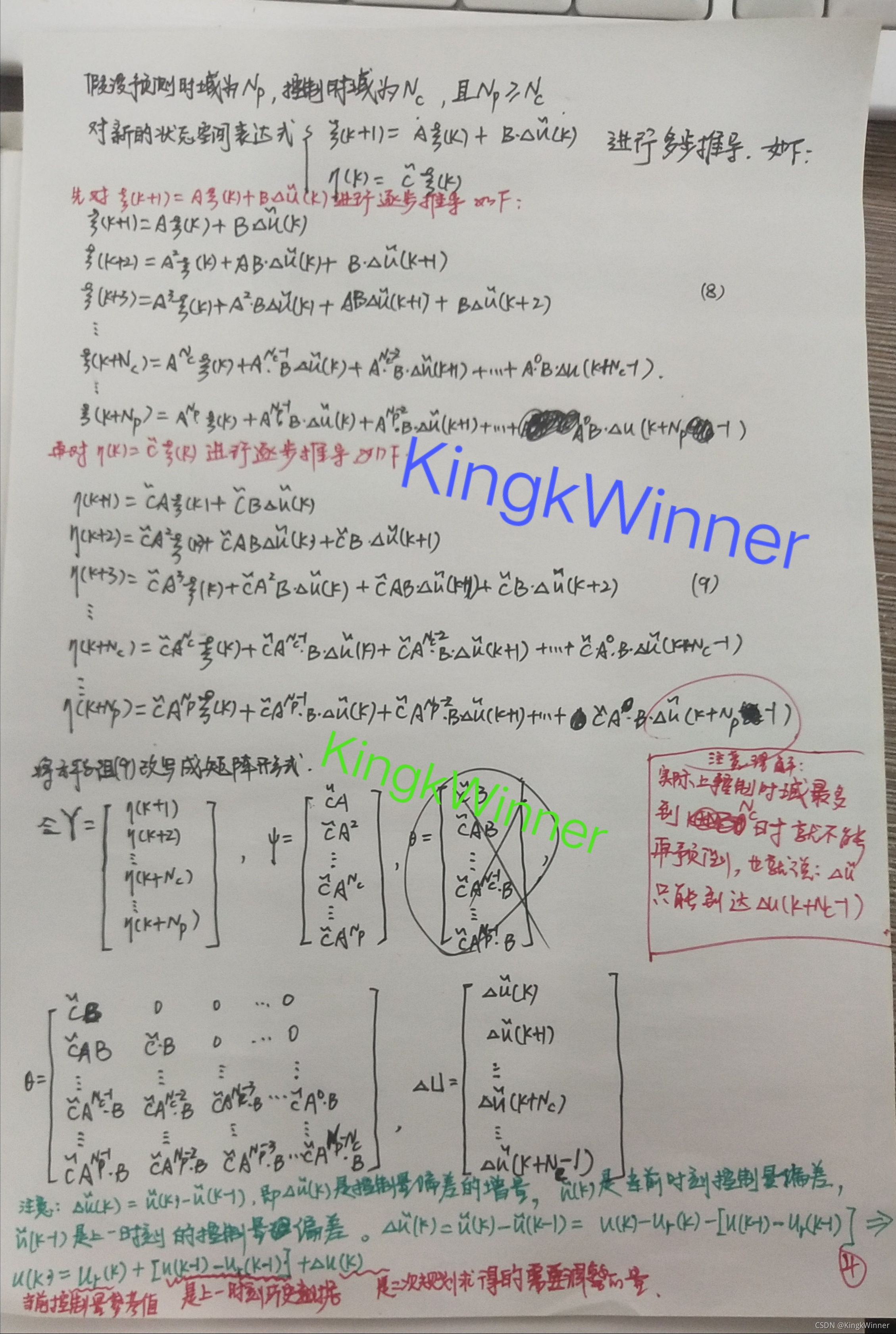
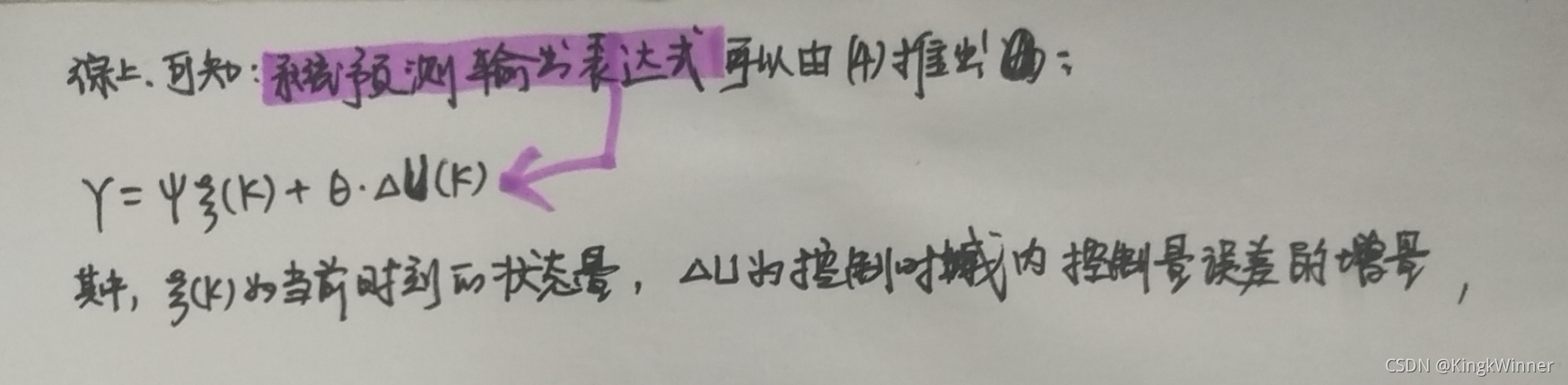
综上,可知系统预测输出表达式可有公式(4)总结推出:
(下一节讲解
目标函数设计
,敬请关注)
版权声明:本文为m0_54639819原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。