1 简介
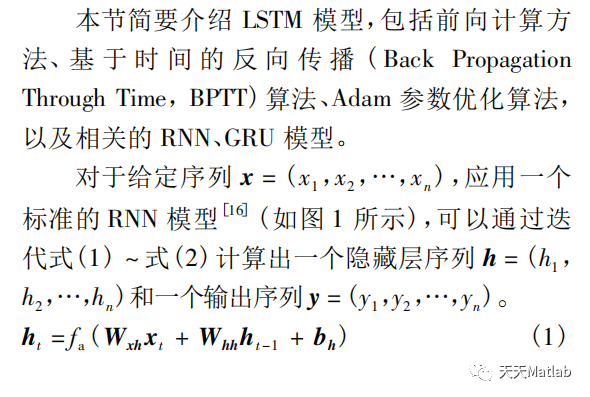
LSTM(Long Short-Term Memory)是长短期记忆网络,是一种时间递归神经网络,适合于处理和预测
时间序列
中间隔和延迟相对较长的重要事件。

2 部分代码
clc;clear all;close all;
%synthetic reach data from LQG 2 joint controller
load('dat3.mat')
load netIMtoAng.mat
load netAngToPos.mat
YPred = predict(netIMtoAng,dat3);
Out1 = netAngToPos(YPred');
%% visualise decoded data
for i= 1:160
% plot path in joint space
p1 = Out1(1:51,i);
p2 = Out1(52:102,i);
v1 = Out1(103:153,i);
v2 = Out1(154:204,i);
subplot(131);plot(p1,p2,'.k'); title('Pos');hold on
subplot(132);plot(v1,v2,'.k'); title('Vel');
hold on;
% pause
subplot(133); plot(tTra(3,i),tTra(4,i),'o'); hold on;
end
% axis image;
subplot(132);xlabel('shoulder (rad)');
ylabel('elbow (rad)');
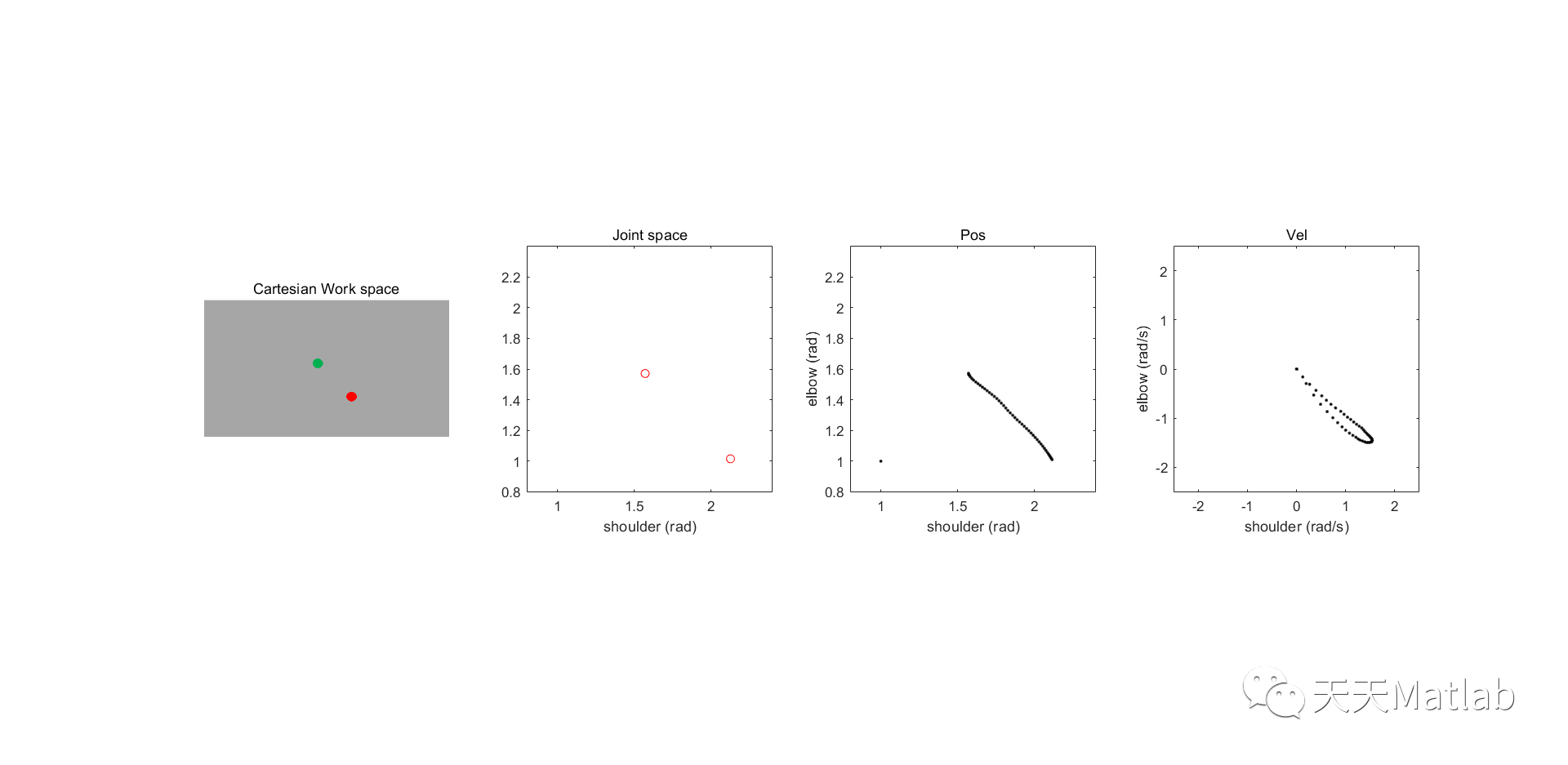
%% Test
t = Tiff('M7.tif','r');
S1 = read(t);
s{7} = rgb2gray(S1);
B{7} = imresize(s{7},[28 28]);
TestImage(:,:,1,1) = B{7}(:,:);
YPred = predict(netIMtoAng,TestImage(:,:,1,1));
Out2 = netAngToPos(YPred');
subplot(141); imshow(S1);title('Cartesian Work space')
subplot(142); plot(tTra(3,7),tTra(4,7),'or'); hold on;
plot(pi/2,pi/2,'or'); hold on;
xlim([0.8,2.4]);ylim([0.8,2.4]);axis square;title('Joint space');
xlabel('shoulder (rad)');
subplot(143);
p1 = Out2(1:51,1);
p2 = Out2(52:102,1);
v1 = Out2(103:153,1);
v2 = Out2(154:204,1);
plot(p1,p2,'.k'); title('Pos');hold on;
xlim([0.8,2.4]);ylim([0.8,2.4]);
xlabel('shoulder (rad)');
ylabel('elbow (rad)');
axis square
subplot(144);plot(v1,v2,'.k'); title('Vel');
xlabel('shoulder (rad/s)');
ylabel('elbow (rad/s)');
xlim([-2.5,2.5]);ylim([-2.5,2.5]);
axis square
%% Lstm
data = Out1(3:51,1)';
% dataY = Out1(54:102,1)';
% velX = Out1(105:153,1)';
% velY = Out1(156:204,1)';
% DD = [dataX; dataY; velX; velY];
figure
plot(data)
%% prepare input -output for lstm
numTimeStepsTrain = floor(0.9*numel(data));
dataTrain = data(1:numTimeStepsTrain+1);
dataTest = data(numTimeStepsTrain+1:end);
mu = mean(dataTrain);
sig = std(dataTrain);
dataTrainStandardized = (dataTrain - mu) / sig;
XTra = dataTrainStandardized(1:end-1);
YTra = dataTrainStandardized(2:end);
%% LSTM training
numFeatures = 1;
numResponses = 1;
numHiddenUnits = 200;
layers = [ ...
sequenceInputLayer(numFeatures)
lstmLayer(numHiddenUnits)
fullyConnectedLayer(numResponses)
regressionLayer];
options = trainingOptions('adam', ...
'MaxEpochs',250, ...
'GradientThreshold',1, ...
'InitialLearnRate',0.005, ...
'LearnRateSchedule','piecewise', ...
'LearnRateDropPeriod',125, ...
'LearnRateDropFactor',0.2, ...
'Verbose',0, ...
'Plots','training-progress');
net = trainNetwork(XTra,YTra,layers,options);
analyzeNetwork(net)
%% forcast- predicted trajectory
dataTestStandardized = (dataTest - mu) / sig;
XTest = dataTestStandardized(1:end-1);
net = predictAndUpdateState(net,XTra);
[net,YPred] = predictAndUpdateState(net,YTra(end));
numTimeStepsTest = numel(XTest);
for i = 2:numTimeStepsTest
[net,YPred(:,i)] = predictAndUpdateState(net,YPred(:,i-1),'ExecutionEnvironment','cpu');
end
YPred = sig*YPred + mu;
YTest = dataTest(2:end);
rmse = sqrt(mean((YPred-YTest).^2))
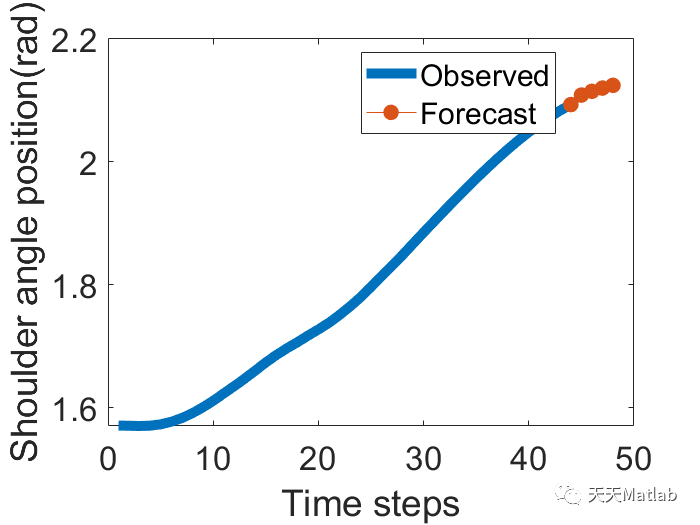
figure
plot(dataTrain(1:end-1),'Linewidth',6)
hold on
idx = numTimeStepsTrain:(numTimeStepsTrain+numTimeStepsTest);
plot(idx,[data(numTimeStepsTrain) YPred],'.-','Markersize',32)
hold off
legend(["Observed" "Forecast"]);
set(gca,'Fontsize',20);
xlabel('Time steps');
ylabel('Shoulder angle position(rad)')
3 仿真结果
4 参考文献
[1]刘一雄. 基于LSTM及注意力机制的行人轨迹预测模型[D]. 华中科技大学, 2018.
