前端时间帮忙定位个问题。docker容器故障恢复后,其中的keepalived进程始终无法启动,也看不到Keepalived的日志。
strace 查看系统调用之后,发现了原因所在
1 socket(PF_LOCAL, SOCK_DGRAM|SOCK_CLOEXEC, 0) = 3 2 connect(3, {sa_family=AF_LOCAL, sun_path="/dev/log"}, 110) = -1 ENOENT (No such file or directory) 3 close(3) = 0 4 open("/var/run/keepalived.pid", O_RDONLY) = 3 5 fstat(3, {st_mode=S_IFREG|0644, st_size=1, ...}) = 0 6 mmap(NULL, 4096, PROT_READ|PROT_WRITE, MAP_PRIVATE|MAP_ANONYMOUS, -1, 0) = 0x7fe85ab1b000 7 read(3, "\n", 4096) = 1 8 read(3, "", 4096) = 0 9 close(3) = 0 10 munmap(0x7fe85ab1b000, 4096) = 0 11 kill(0, SIG_0) = 0 12 socket(PF_LOCAL, SOCK_DGRAM|SOCK_CLOEXEC, 0) = 3 13 connect(3, {sa_family=AF_LOCAL, sun_path="/dev/log"}, 110) = -1 ENOENT (No such file or directory) 14 close(3) = 0 15 exit_group(0) = ? 16 +++ exited with 0 +++
这就是一个典型的linux单例守护进程启动做的事情:检测进程是否已经存在(判断记录文件是否存在以及对应pid进程是否还在执行),并通过syslog套接字文件向syslog服务端发送日志。
很显然,Keepalived无法正常启动是故障宕机时,相应的pid文件没有清理干净,如果仅仅如此,Keepalived应该可以启动,一般守护进程启动都会覆盖残留的锁文件,问题关键在read(3, “\n”, 4096) : 锁文件Keepalived.pid是空的!! 而kil 向进程0 发送信号0,执行成功,则Keepalived认为已经有Keepalived进程正在运行。所以
问题出在锁文件存在且内容为”\n”
,故依次清理 keepalived.pid vrrp.pid checkers.pid文件后,Keepalived正常启动。至于定位为何锁文件内容为”\n”,那是后话了。
经此一事,笔者想写一写Linux 守护进程
守护进程特点与相关概念
守护进程都有下面几个特点:
1、没有控制终端,终端名设置为?号:也就意味着没有 stdin 0 、stdout 1、stderr 2
2、父进程不是用户创建的进程,init进程或者systemd(pid=1)以及用户人为启动的用户层进程一般以pid=1的进程为父进程,而以kthreadd内核进程创建的守护进程以kthreadd为父进程
3、守护进程一般是会话首进程、组长进程。
4、工作目录为 \ (根),主要是为了防止占用磁盘导致无法卸载磁盘
控制终端
通过网络登录或者终端登录建立的会话,会分配唯一一个tty终端或者pts伪终端(网络登录),实际上它们都是虚拟的,以文件的形式建立在/dev目录,而并非实际的物理终端。
在终端中按下的特殊按键:中断键(ctrl+c)、退出键(ctrl+\)、终端挂起键(ctrl + z)会发送给当前终端连接的会话中的前台进程组中的所有进程
在网络登录程序中,登录认证守护程序 fork 一个进程处理连接,并以ptys_open 函数打开一个伪终端设备(文件)获得文件句柄,并将此句柄复制到子进程中作为标准输入、标准输出、标准错误,所以位于此控制终端进程下的所有子进程将可以持有终端
与控制终端相连的会话首进程也叫控制进程
进程组
进程组是一个或者多个进程的集合。一般由某个程序fork出一个家族来构成进程组,或者由管道命令建立作业构成进程组。
同一个进程组中的所有进程接收来自同一终端的信号。
进程组中的第一个进程作为进程组的首长,进程组id取首长进程的id。在各个进程中,通过函数getpgrp获取其所属进程组id
孤儿进程组
一个进程的父进程终止后,进程变成了孤儿进程,将被pid为1的进程(init进程或者systemd)收养。
而对孤儿进程组的定义是:进程组中每个进程的父进程要么在组中,也么不在该组所在会话中。
换言之,如果一个进程组中进程的父进程如果是组中成员,或者是init、systemd进程的话,这个进程组就一定是孤儿进程组。这样的进程组是很常见的,下图就是一个简单且典型的孤儿进程组

很显然,只有一个进程的进程组,并且是孤儿进程的话,进程组将变成孤儿进程组(哪怕它只有一个进程)。
典型的例子是一个父进程fork子进程之后,父进程立即退出,这样子进程所在的进程组将变为孤儿进程组。
这样的孤儿进程组中的每个停止(Stopped)状态的每个进程都将收到挂断信号(SIGHUP),然后又立即收到继续信号(SIGCONT)。所以fork子进程之后,退出父进程,如果子进程还需要继续运行,则需要处理挂断信号,否则进程对挂断信号的默认处理将是退出。
此时的孤儿进程组并没有变为后台进程
,一些博客将后台进程说成是孤儿进程组的一个特点,笔者认为是不正确的,在他们的示例中,孤儿进程组变为后台进程的原因是:父进程退出后,子进程在运行时向自身发送了SIGTSTP信号,这就像在终端按下终端挂起键(ctrl+z)一样,暂时断开了进程与控制终端的连接,自然变成了后台进程。
所以这是将进程转到后台运行的一个手段,但并不能创建守护进程,后面会将怎么创建守护进程。
会话
表示一个或多个进程组的集合,在有控制终端的会话中,可以被分为一个前台进程组和多个后台进程组。
取首进程id为会话id。
函数getsid用来获取会话id,而
函数setsid用来新建一个会话,只有非首长进程(非进程组的组长)才能调用setsid新建会话
。实际上
setsid做了三件事
-
设置当前进程的会话id为该进程id,此进程成为会话首进程。
-
将调用setsid的进程设置为一个新进程组的首长进程。
-
断开已连接的控制终端
这三步是创建守护进程的重要步骤。
下图结合了笔者对这些概念的理解,做出的判断

守护进程的创建
创建守护进程有标准的步骤:
-
如果是单例守护进程,结合锁文件和kill函数检测是否有进程已经运行
-
umask取消进程本身的文件掩码设置,也就是设置Linux文件权限,一般设置为000,这是为了防止子进程创建创建一个不能访问的文件(没有正确分配权限)。此过程并非必须,如果守护进程不会创建文件,也可以不修改
-
fork出子进程,父进程退出。这样子进程一定不是组长进程(进程id不等于进程组id)
-
子进程调用setsid新建会话(使子进程变为会话首进程、组长进程,并断开终端)
-
如果是单例守护进程,将pid写入到记录锁文件,一般为/var/run/xxx.pid
-
切换工作目录到根目录,这是为了防止占用磁盘造成磁盘不能卸载。所以也可以改到别的目录,只要保证目录所在磁盘不会中途卸载
-
重定向输入输入错误文件句柄,将其指向/dev/null。
前面提到,守护进程一般借助记录锁文件来(文件存在并且文件内记录的pid对应的进程依然活跃)判断是否已经有进程存在。
多数守护进程并不自己维护日志文件,而是统一将日志输出给遵循syslog协议的日志进程(如:rsyslogd)处理,统一将日志输出至 /var/log/messages,当然这些日志进程也是可以配置的。
而且守护进程因为是没有终端的后台进程,所以系统不会发送一些跟终端相关的信号给守护进程,程序可以通过捕捉这些只有可能人为发送的信号,来处理一些事情,比如处理SIGHUP来动态更新程序配置就是典型例子。下面的代码演示了如何创建一个守护进程。
1 #include <stdio.h> 2 #include <syslog.h> 3 #include <errno.h> 4 #include <unistd.h> 5 #include <stdlib.h> 6 #include <fcntl.h> 7 #include <signal.h> 8 #include <sys/types.h> 9 #include <sys/stat.h> 10 #include <sys/resource.h> 11 12 #define PID_FILE "/var/run/sampled.pid" 13 14 int sampled_running(){ 15 FILE * pidfile = fopen(PID_FILE,"r"); 16 pid_t pid; 17 int ret ; 18 19 if (! pidfile) { 20 return 0; 21 } 22 23 ret = fscanf(pidfile,"%d",&pid); 24 if (ret == EOF && ferror(pidfile) != 0){ 25 syslog(LOG_INFO,"Error open pid file %s",PID_FILE); 26 } 27 28 fclose(pidfile); 29 30 // 检测进程是否存在 31 if ( kill(pid , 0 ) ){ 32 syslog(LOG_INFO,"Remove a zombie pid file %s", PID_FILE); 33 unlink(PID_FILE); 34 return 0; 35 } 36 37 return pid; 38 } 39 40 pid_t sampled(){ 41 pid_t pid; 42 struct rlimit rl; 43 int fd,i; 44 45 // 创建子进程,并退出当前父进程 46 if((pid = fork()) < 0){ 47 syslog(LOG_INFO,"sampled : fork error"); 48 return -1; 49 } 50 if ( pid != 0) { 51 // 父进程直接退出 52 exit(0); 53 } 54 55 // 新建会话,成功返回值是会话首进程id,进程组id ,首进程id 56 pid = setsid(); 57 58 if ( pid < -1 ){ 59 syslog(LOG_INFO,"sampled : setsid error"); 60 return -1; 61 } 62 63 // 将工作目录切换到根目录 64 if ( chdir("/") < 0 ) { 65 syslog(LOG_INFO,"sampled : chidr error"); 66 return -1; 67 } 68 69 // 关闭所有打开的句柄,如果确定父进程未打开过句柄,此步可以不做 70 if ( rl.rlim_max == RLIM_INFINITY ){ 71 rl.rlim_max = 1024; 72 } 73 for(i = 0 ; i < rl.rlim_max; i ++) { 74 close(i); 75 } 76 77 // 重定向输入输出错误 78 fd = open("/dev/null",O_RDWR,0); 79 if(fd != -1){ 80 dup2(fd,STDIN_FILENO); 81 dup2(fd,STDOUT_FILENO); 82 dup2(fd,STDERR_FILENO); 83 if (fd > 2){ 84 close(fd); 85 } 86 } 87 88 // 消除文件掩码 89 umask(0); 90 return 0; 91 } 92 93 int pidfile_write(){ 94 // 这里不用fopen直接打开文件是不想创建666权限的文件 95 FILE * pidfile = NULL; 96 int pidfilefd = creat(PID_FILE,S_IRUSR | S_IWUSR | S_IRGRP | S_IROTH); 97 if(pidfilefd != -1){ 98 pidfile = fdopen(pidfilefd,"w"); 99 } 100 101 if (! pidfile){ 102 syslog(LOG_INFO,"pidfile write : can't open pidfile:%s",PID_FILE); 103 return 0; 104 } 105 fprintf(pidfile,"%d",getpid()); 106 fclose(pidfile); 107 return 1; 108 } 109 110 int main(){ 111 int err,signo; 112 sigset_t mask; 113 114 if (sampled_running() > 0 ){ 115 exit(0); 116 } 117 118 if ( sampled() != 0 ){ 119 120 } 121 // 写记录锁文件 122 if (pidfile_write() <= 0) { 123 exit(0); 124 } 125 126 while(1) { 127 // 捕捉信号 128 err = sigwait(&mask,&signo); 129 if( err != 0 ){ 130 syslog(LOG_INFO,"sigwait error : %d",err); 131 exit(1); 132 } 133 switch (signo){ 134 default : 135 syslog(LOG_INFO,"unexpected signal %d \n",signo); 136 break; 137 case SIGTERM: 138 syslog(LOG_INFO,"got SIGTERM. exiting"); 139 exit(0); 140 } 141 142 } 143 144 }
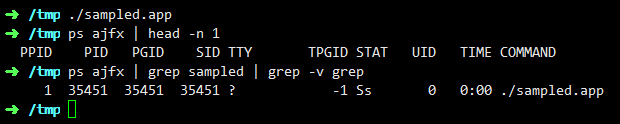
程序编译运行结果,可以看到pid 、进程组id、会话id是一样的,没有终端,并且直接由pid为1的进程接管。此时的进程已经成为一个守护进程。
sighup与nohup
sighup(挂断)信号在控制终端或者控制进程死亡时向关联会话中的进程发出,默认进程对SIGHUP信号的处理时终止程序,所以我们在shell下建立的程序,在登录退出连接断开之后,会一并退出。
nohup,故名思议就是忽略SIGHUP信号,一般搭配& 一起使用,&表示将此程序提交为后台作业或者说后台进程组。执行下面的命令
nohup bash -c “tail -f /var/log/messages | grep sys” &

nohup与&启动的程序, 在终端还未关闭时,完全不像传统的守护进程,因为其不是会话首进程且持有终端,只是其忽略了SIGHUP信号
从nohup源码就可以看到,其实nohup只做了3件事情
- dofile函数将输出重定向到nohup.out文件
- signal函数设置SIGHUP信号处理函数为SIG_IGN宏(指向sigignore函数),以此忽略SIG_HUP信号
- execvp函数用新的程序替换当前进程的代码段、数据段、堆段和栈段。
execvp 函数执行后,新程序(并没有fork进程)会继承一些调用进程属性,比如:进程id、会话id,控制终端等
登录连接断开之后

在终端关闭后,
nohup起到类似守护进程的效果,但是跟传统的守护进程还是有区别的
1、nohup创建的进程工作目录是你执行命令时所在的目录
2、0 1 2 标准输入 标准输出 标准错误 指向nohup.out文件
3、nohup创建的进程组中,除首长进程的父进程id变为1之外,其余进程依然保留原来的会话id、进程组id、父进程id,都保持不变