1.前言
本文将介绍在Qt下怎么简单的进行ROS开发的方案,使用的是ros_qtc_plugin插件,这个插件使得Qt新建ROS工作空间,ROS包,launch文件,urdf文件和ROScpp节点。同时,你还可以在QT中编译包、执行节点和调试项目。
2.安装 ros_qtc_plugin插件
使用系统:Ubuntu14.04
没有安装过QT(安装了Qt也没关系,只要打开对应的软件快捷方式就可以)
(1)使用apt-get方式安装
sudo add-apt-repository ppa:beineri/opt-qt57-trusty
sudo add-apt-repository ppa:levi-armstrong/ppa
sudo apt-get update && sudo apt-get install qt57creator-plugin-ros(2)安装完之后可以从应用程序中找到(如图)
注意!!!—–程序名称为Qt 5.7 Creator
不管你之前有没有安装Qt,都是打开这个程序
3.使用QT建立ROS工作空间
(1)打开前面说的程序,可看到以下画面
(2)点击File->New File or Project , 可看到以下画面
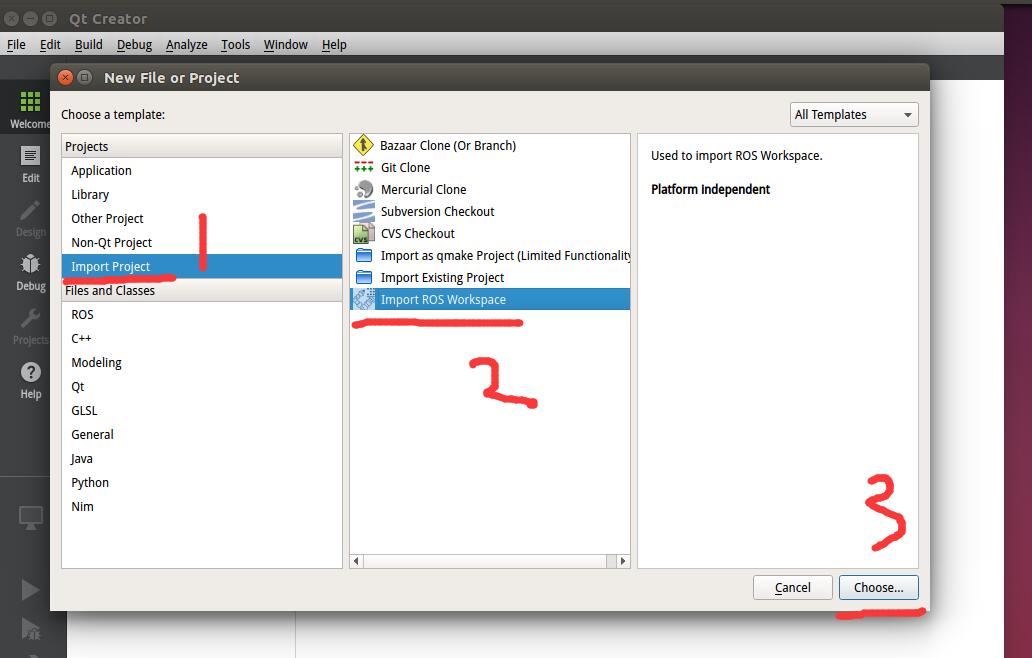
(3)按照上图顺序操作后,可看到以下画面
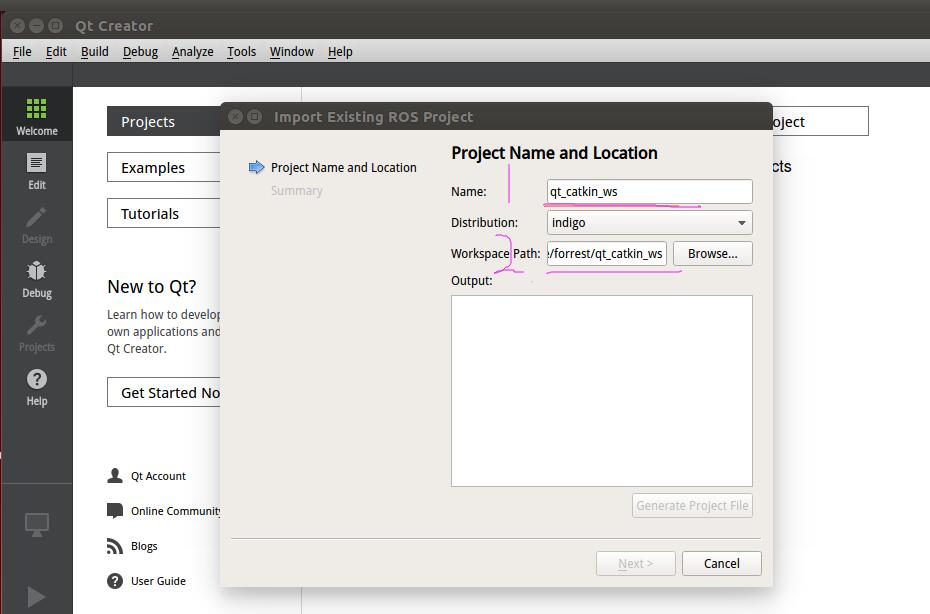
其中步骤1为新建工作空间的名字,步骤2为工作空间所在的文件夹
(4)按照上图顺序操作后,可看到以下画面
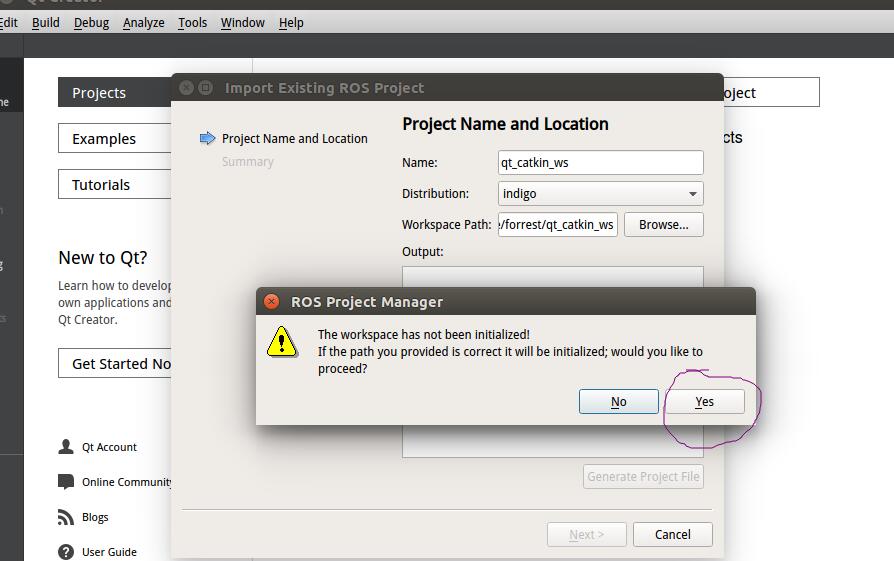
(5)按照上图顺序操作后,可看到以下画面
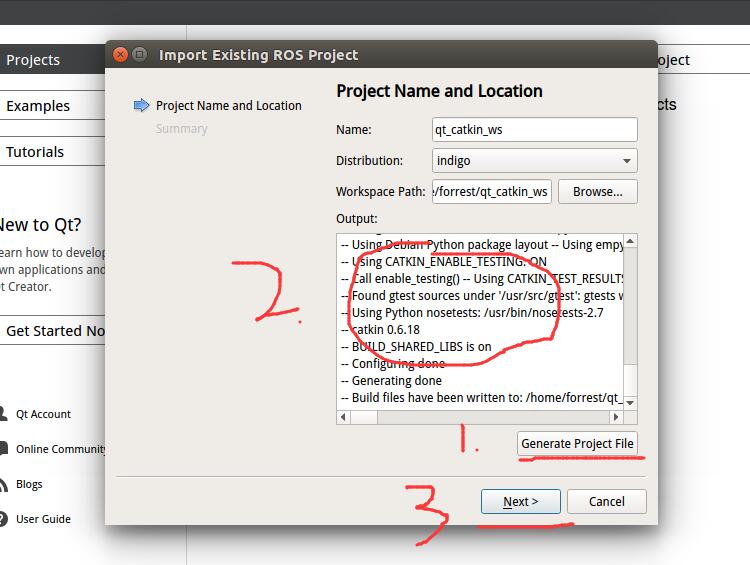
这里我们先点击Generate Project File,等待初始化完后出现步骤2内容,然后点击next
(6)按照上图顺序操作后,可看到以下画面
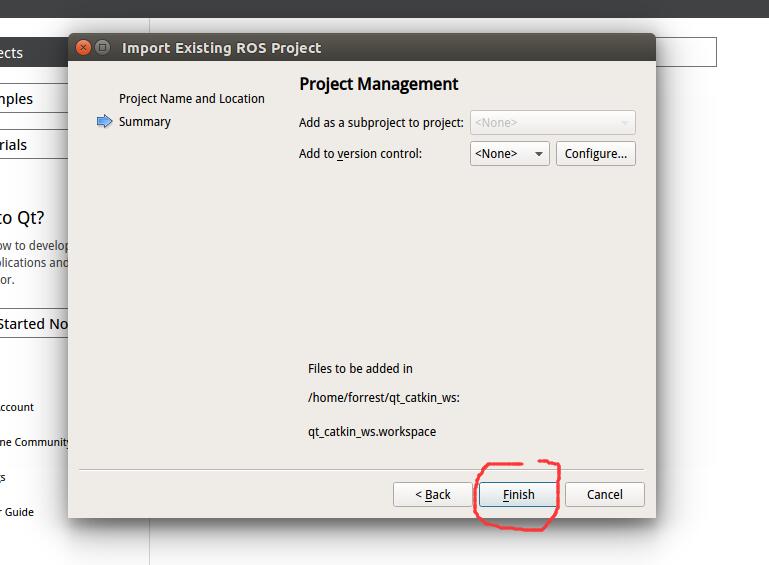
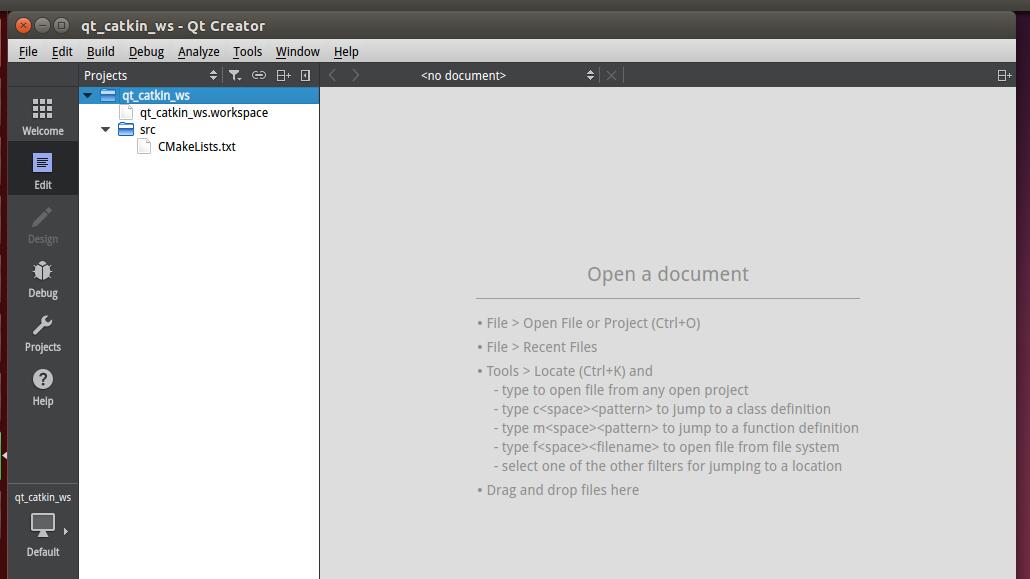
(7)这样一个工作空间我们就建好了,可看到以下画面
4. 使用QT建立ROS包
(1)点击src->右键->add new

(2)按照上图顺序操作后,可看到以下画面
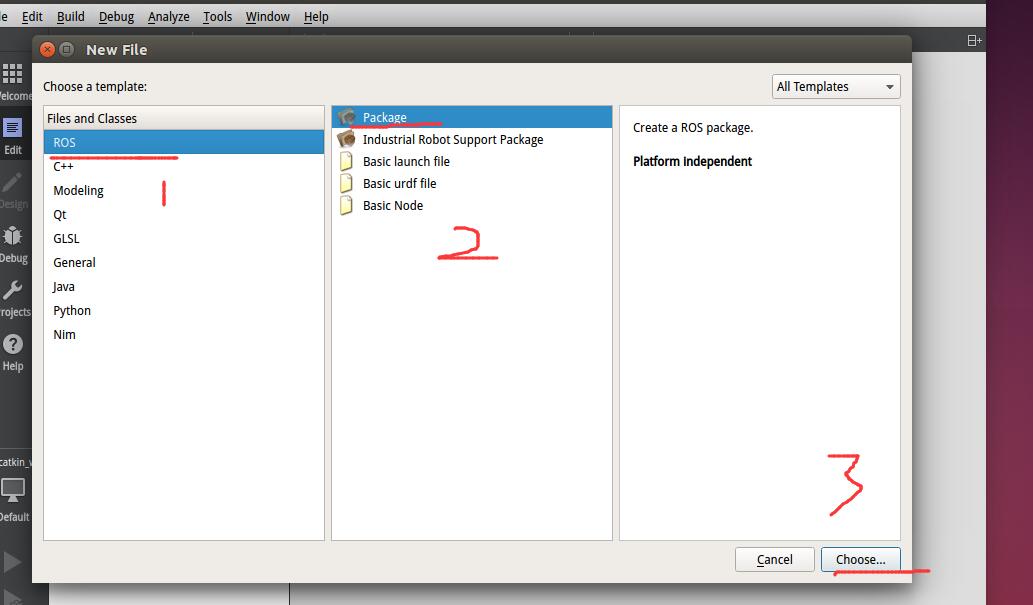
(3)按照上图顺序操作后,可看到以下画面
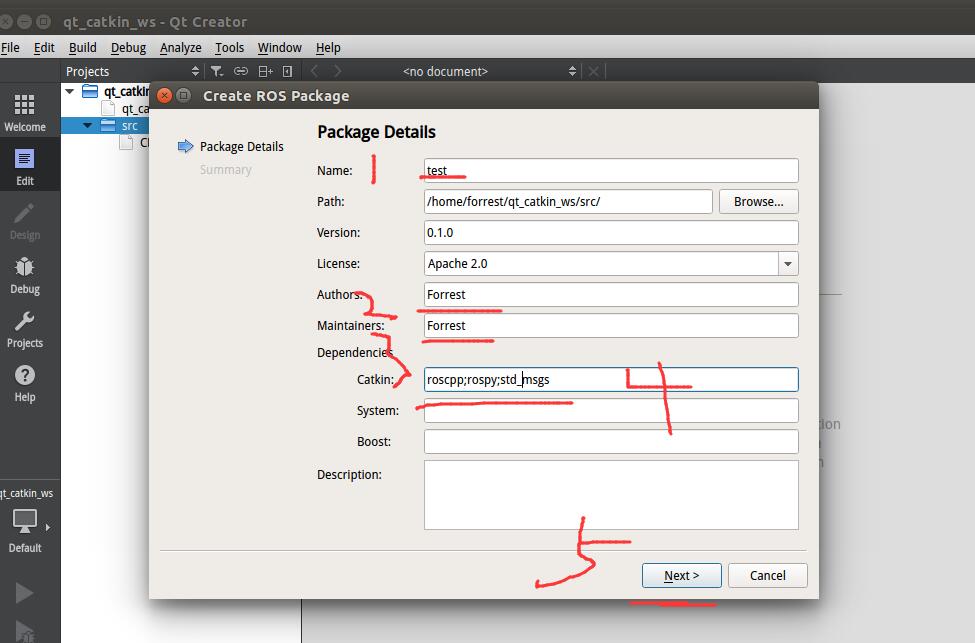
其中,步骤1为新建包ROS的名字,步骤2和3为拥有者名(可不填),步骤4为ROS包包含的文件
(4)按照上图顺序操作后,可看到以下画面
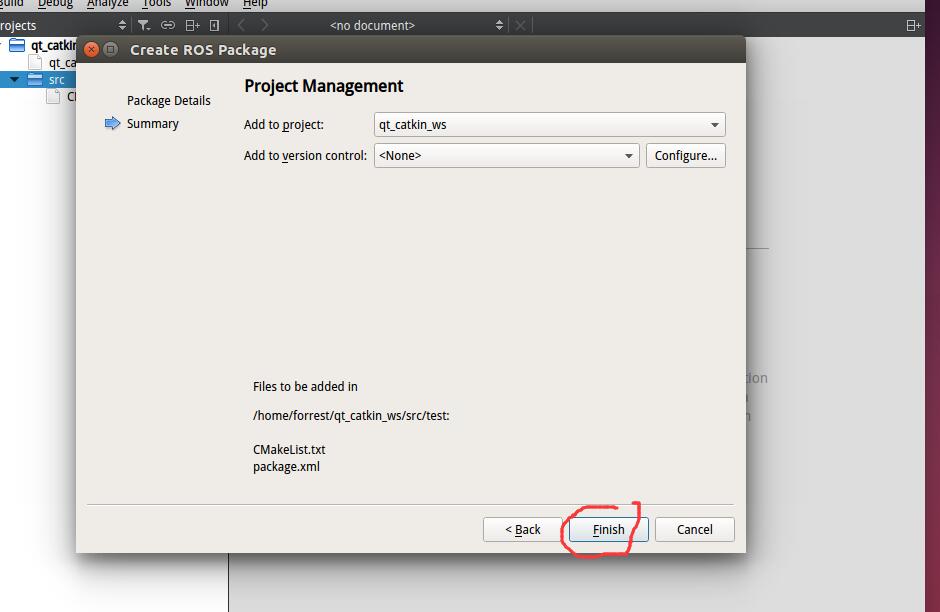
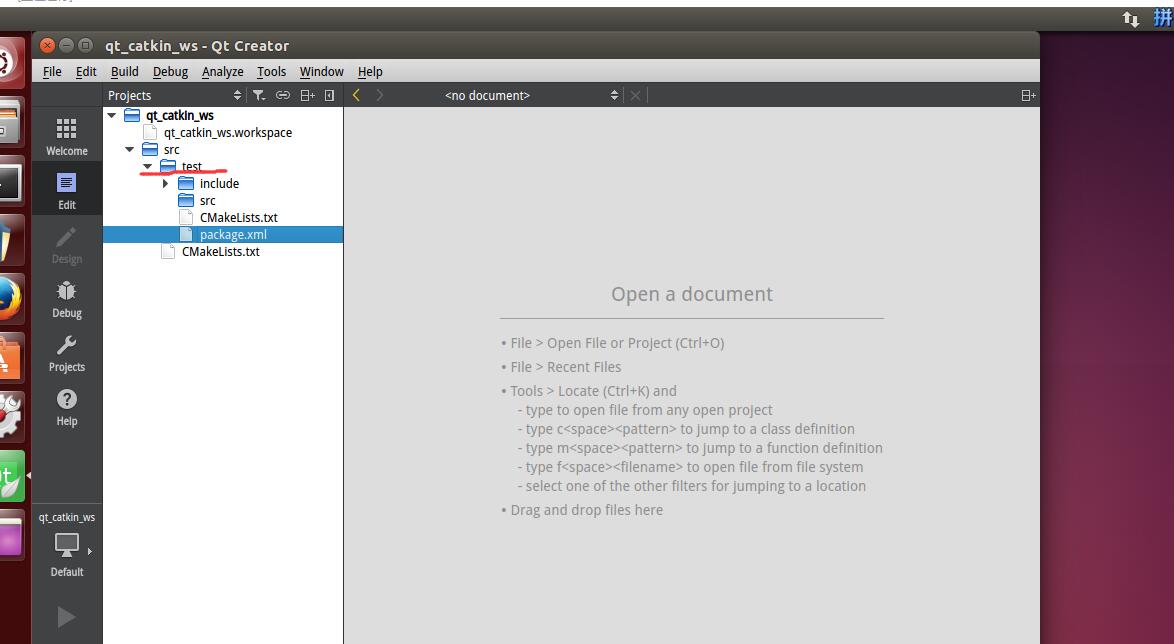
(5)按照上图顺序操作后,可看到以下画面
这里我们的ROS包就建立好了a
5.使用QT建立ROS节点
(1)点击src->右键->add new
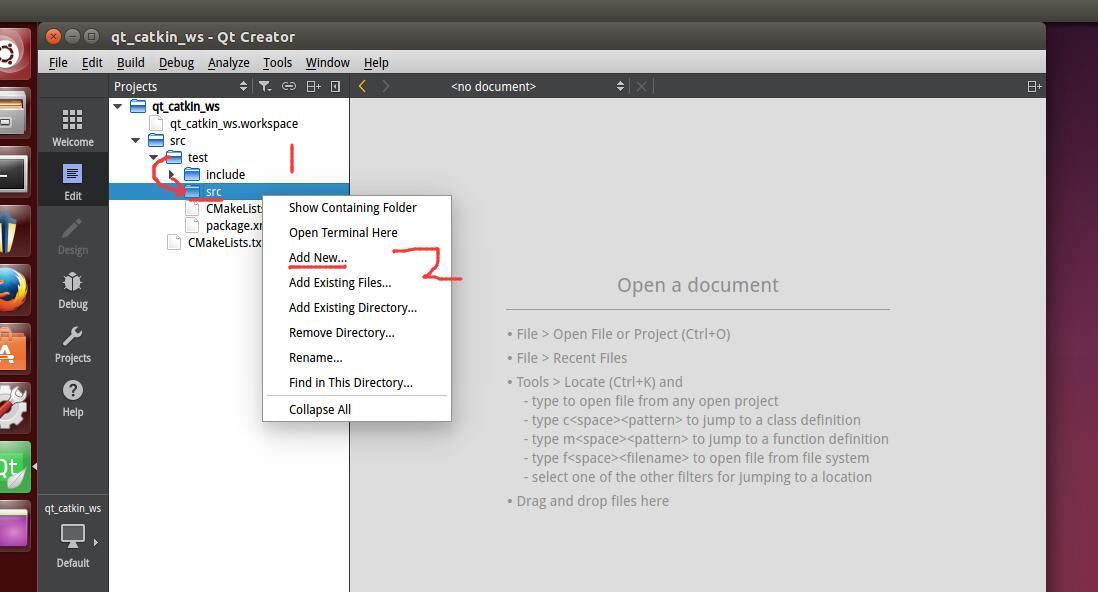
( 2 )按照上图顺序操作后,可看到以下画面
步骤1为节点名称
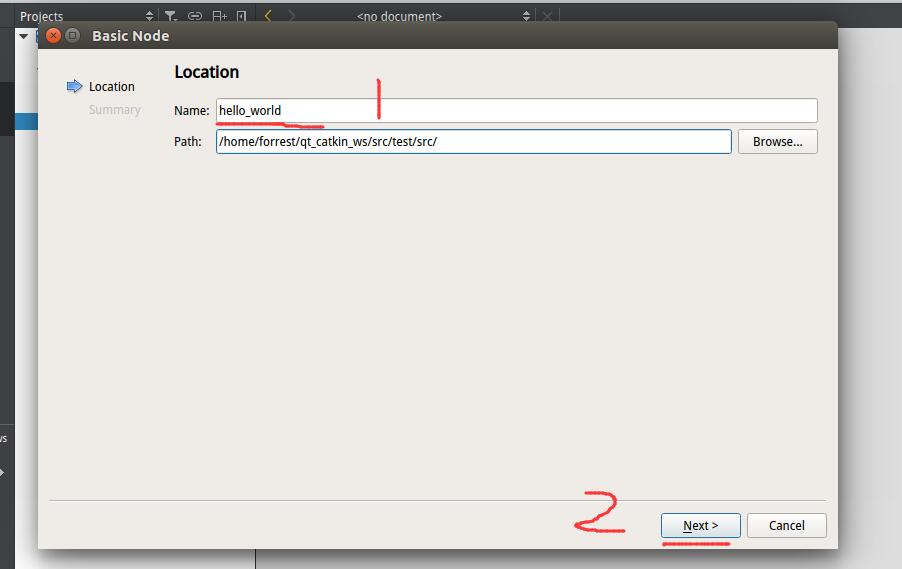
( 3 )按照上图顺序操作后,可看到以下画面
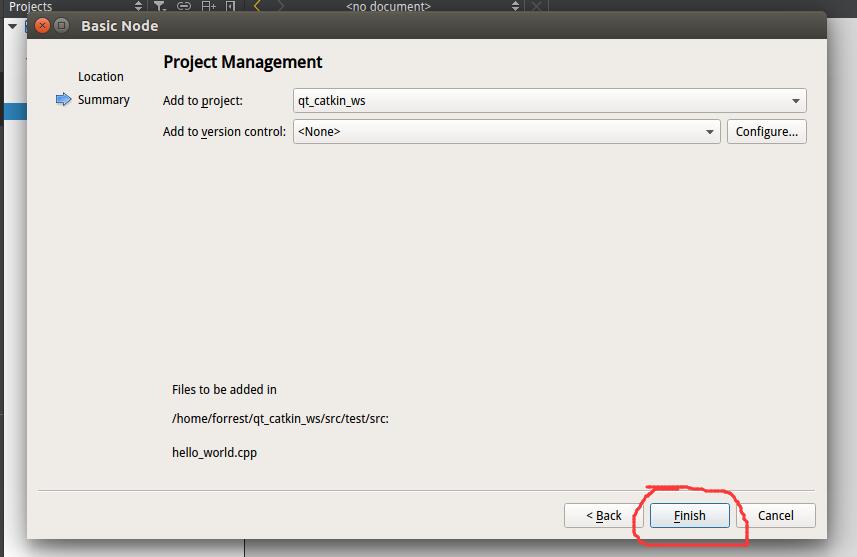
(4)按照上图顺序操作后,可看到以下画面
到这里,我们ROS节点就建立完成了
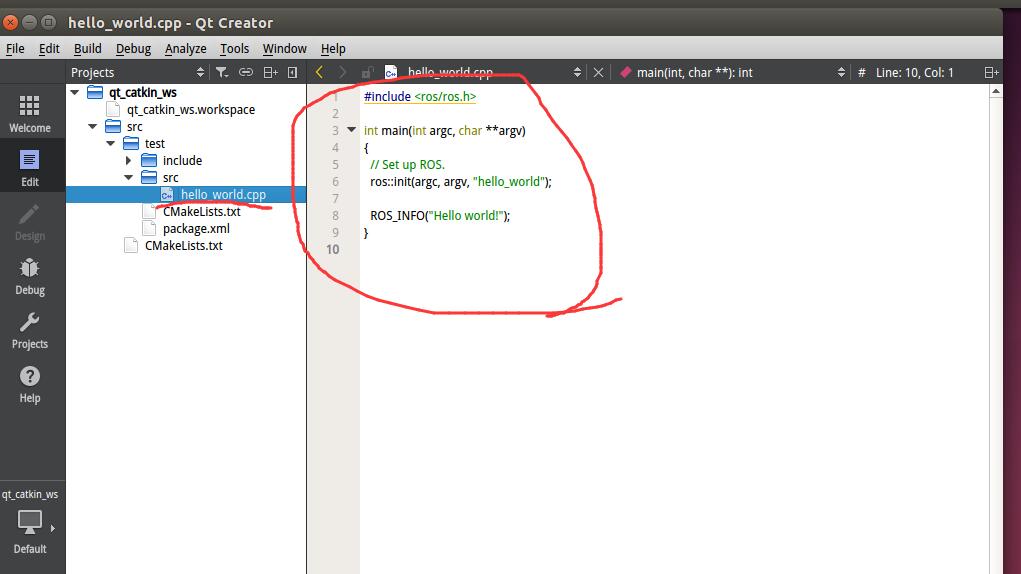
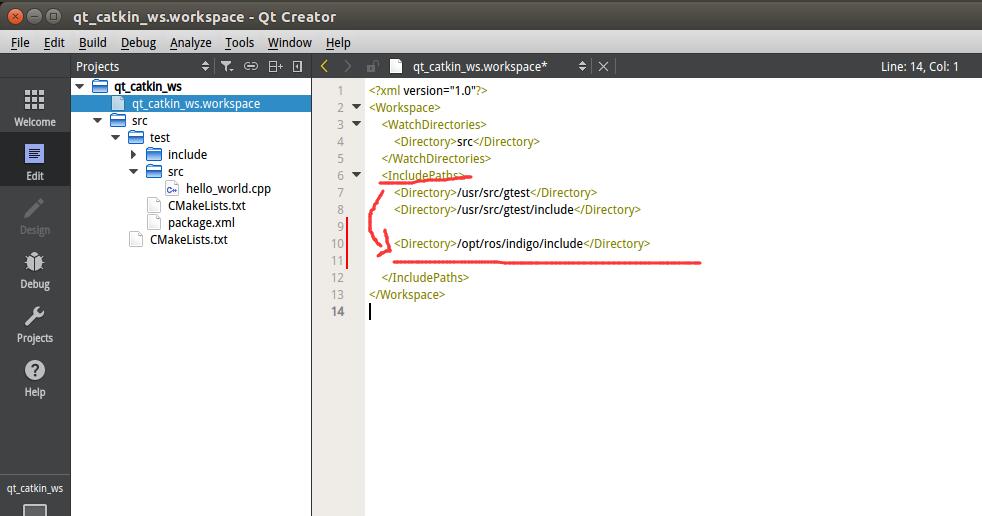
(5)建立完节点后,我们要QT包含一下ROS的头文件
点击打开“qt_catkin_ws.workspace”,在在标签下加入下面这行
<Directory>/opt/ros/indigo/include</Directory>
由于发现一个很好开发ROS的IDE,所以教程到这里就结束了,以下为IDE链接: