前言
LBP(Local Binary Pattern,局部二值模式)是一种用来描述图像局部纹理特征的算子;它具有旋转不变性和灰度不变性等显著的优点。它是首先由T. Ojala, M.Pietikäinen, 和 D. Harwood 在1994年提出,用于纹理特征提取。而且,提取的特征是图像的局部的纹理特征。常用的特征描述子有:HOG、Harris、LBP等等,其中LBP是最为简单且有效的一种特征描述子,下面来介绍一下LBP以及其变种,附带python的程序实现。
1、LBP
概述
原始的LBP算子定义在一个
3
×
3
3
×
3
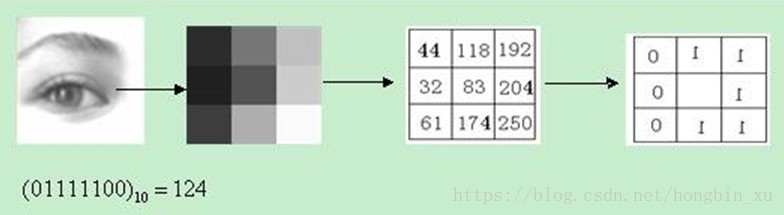
的窗口内,以窗口中心像素为阈值,与相邻的8个像素的灰度值比较,若周围的像素值大于中心像素值,则该位置被标记为1;,否则标记为0。如此可以得到一个8位二进制数(通常还要转换为10进制,即LBP码,共256种),将这个值作为窗口中心像素点的LBP值,以此来反应这个
3
×
3
3
×
3
区域的纹理信息。
示意图如下:(摘自网络)
公式
表示成数学公式:
L
B
P
(
x
c
,
y
c
)
=
∑
p
=
1
8
s
(
I
(
p
)
−
I
(
c
)
)
∗
2
p
L
B
P
(
x
c
,
y
c
)
=
∑
p
=
1
8
s
(
I
(
p
)
−
I
(
c
)
)
∗
2
p
其中,
p
p
表示
窗口中除中心像素点外的第
p
p
个像素点;
表示中心像素点的灰度值,
I
(
p
)
I
(
p
)
表示领域内第
p
p
个像素点的灰度值;
公式如下:
s
(
x
)
=
{
1
,
x
≥
0
0
,
o
t
h
e
r
w
i
s
e
s
(
x
)
=
{
1
,
x
≥
0
0
,
o
t
h
e
r
w
i
s
e
直观解释
通过上述变换,我们可以将一个像素点与8个相邻点之间的差值关系用一个数表示,这个数的范围是0-255。因为LBP记录的是中心像素点与领域像素点之间的差值,所以当光照变化引起像素灰度值同增同减时,LBP变化并不明显。所以可以认为LBP对与光照变化不敏感,LBP检测的仅仅是图像的纹理信息,因此,进一步还可以将LBP做直方图统计,这个直方图可以用来作为纹理分析的特征算子。
程序实现
完整程序会在最后一起给出,这里就只给出函数了。
def LBP(src):
'''
:param src:灰度图像
:return:
'''
height = src.shape[0]
width = src.shape[1]
dst = src.copy()
lbp_value = np.zeros((1,8), dtype=np.uint8)
neighbours = np.zeros((1,8), dtype=np.uint8)
for x in range(1, width-1):
for y in range(1, height-1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = lbp
return dst
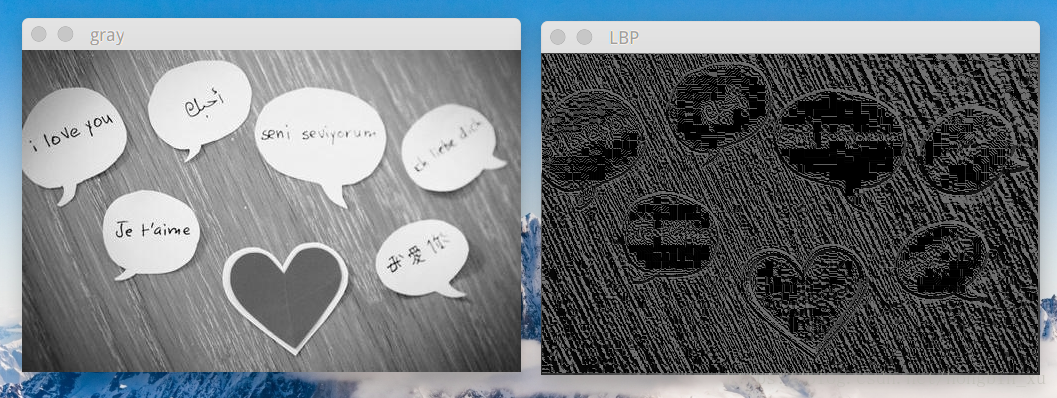
运行结果

2、圆形LBP
概念
我们不难注意到原始的LBP算子仅仅只是覆盖了很小的一个
3
×
3
3
×
3
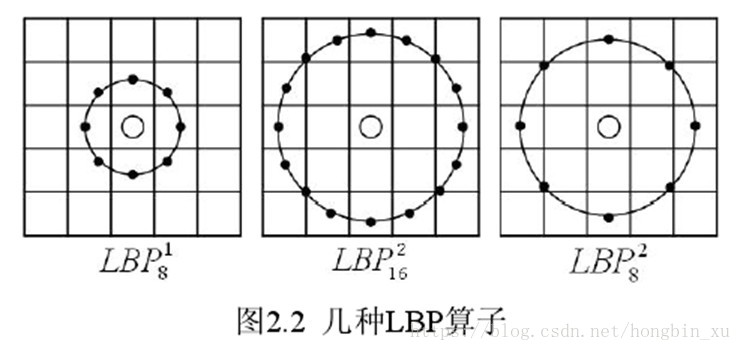
领域的范围,这显然不能满足提取不同尺寸纹理特征的需求。为了适应不同尺度的纹理特征,并达到灰度和旋转不变性的要求,Ojala等对LBP 算子进行了改进,将 3×3邻域扩展到任意邻域,并用圆形邻域代替了正方形邻域。改进后的LBP 算子允许在半径为 R 的圆形邻域内有任意多个像素点。
假设半径为R的圆形区域内含有P个采样点的LBP算子:
对比上图,发现当
p
=
8
,
R
=
1
p
=
8
,
R
=
1
时,圆形LBP基本与原始LBP一致;比如在
p
=
16
,
R
=
2
p
=
16
,
R
=
2
时,圆形边界上的点可能不是整数或正好落在某个像素格子内,可能位于交界处,所以这种情况下,可以使用双线性插值法来计算该点的像素值。
公式
圆形LBP跟原始公式很像,无非就是增加了两个变量:采样点数
P
P
以及采样圆形领域半径
。
表示成数学公式:
L
B
P
P
,
R
(
x
c
,
y
c
)
=
∑
P
p
=
1
s
(
I
(
p
)
−
I
(
c
)
)
∗
2
p
L
B
P
P
,
R
(
x
c
,
y
c
)
=
∑
p
=
1
P
s
(
I
(
p
)
−
I
(
c
)
)
∗
2
p
其中,
p
p
表示圆形区域中总计
个采样点中的第
p
p
个采样点(注意大小写区分开了);
表示中心像素的灰度值,
I
(
p
)
I
(
p
)
表示圆形边界像素点中第
p
p
个点的灰度值。
总共有
个点在圆形边界上,那么那些点的坐标如何计算?通过下面公式计算:
{
x
p
=
x
c
+
R
∗
cos
(
2
π
p
P
)
y
p
=
y
c
−
R
∗
sin
(
2
π
p
P
)
{
x
p
=
x
c
+
R
∗
cos
(
2
π
p
P
)
y
p
=
y
c
−
R
∗
sin
(
2
π
p
P
)
s
(
x
)
s
(
x
)
公式与原始LBP中的一样,公式如下:
s
(
x
)
=
{
1
,
x
≥
0
0
,
o
t
h
e
r
w
i
s
e
s
(
x
)
=
{
1
,
x
≥
0
0
,
o
t
h
e
r
w
i
s
e
程序实现
def circular_LBP(src, radius, n_points):
height = src.shape[0]
width = src.shape[1]
dst = src.copy()
src.astype(dtype=np.float32)
dst.astype(dtype=np.float32)
neighbours = np.zeros((1, n_points), dtype=np.uint8)
lbp_value = np.zeros((1, n_points), dtype=np.uint8)
for x in range(radius, width - radius - 1):
for y in range(radius, height - radius - 1):
lbp = 0.
# 先计算共n_points个点对应的像素值,使用双线性插值法
for n in range(n_points):
theta = float(2 * np.pi * n) / n_points
x_n = x + radius * np.cos(theta)
y_n = y - radius * np.sin(theta)
# 向下取整
x1 = int(math.floor(x_n))
y1 = int(math.floor(y_n))
# 向上取整
x2 = int(math.ceil(x_n))
y2 = int(math.ceil(y_n))
# 将坐标映射到0-1之间
tx = np.abs(x - x1)
ty = np.abs(y - y1)
# 根据0-1之间的x,y的权重计算公式计算权重
w1 = (1 - tx) * (1 - ty)
w2 = tx * (1 - ty)
w3 = (1 - tx) * ty
w4 = tx * ty
# 根据双线性插值公式计算第k个采样点的灰度值
neighbour = src[y1, x1] * w1 + src[y2, x1] * w2 + src[y1, x2] * w3 + src[y2, x2] * w4
neighbours[0, n] = neighbour
center = src[y, x]
for n in range(n_points):
if neighbours[0, n] > center:
lbp_value[0, n] = 1
else:
lbp_value[0, n] = 0
for n in range(n_points):
lbp += lbp_value[0, n] * 2**n
# 转换到0-255的灰度空间,比如n_points=16位时结果会超出这个范围,对该结果归一化
dst[y, x] = int(lbp / (2**n_points-1) * 255)
return dst
运行结果
当
R
=
1
,
P
=
8
R
=
1
,
P
=
8
时:
当
R
=
2
,
P
=
16
R
=
2
,
P
=
16
时:
当
R
=
4
,
P
=
16
R
=
4
,
P
=
16
时:

3、旋转不变LBP
概念
从原始LBP的定义来看,LBP算子是灰度不变的,但不是旋转不变的。图像旋转的话就会得到不同的LBP值。
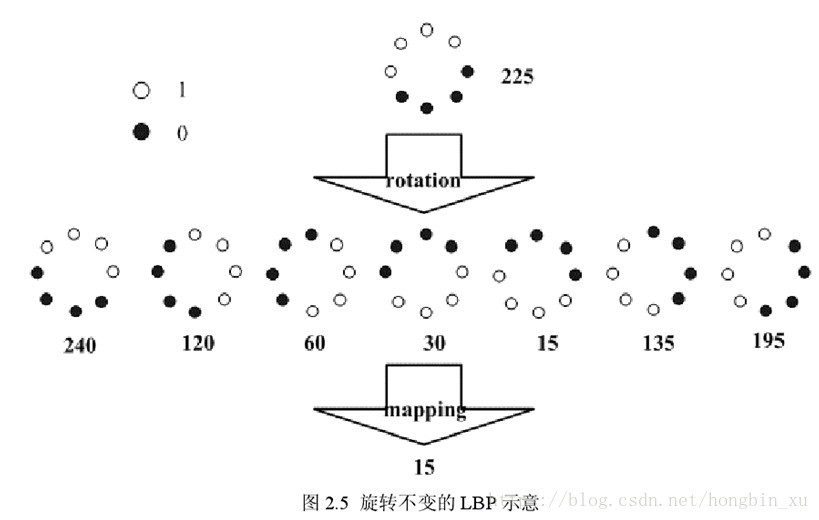
Maenpaa等人又将 LBP算子进行了扩展,提出了具有旋转不变性的 LBP 算子,即不断旋转圆形邻域得到一系列初始定义的 LBP值,取其最小值作为该邻域的 LBP 值。
如上图所示(图片摘自网络),原始LBP得到的数值转化为二进制编码,对它进行循环移位操作,有8种情况(包括自身)。取其中最小的一个值,比如图中就对应着15,这个值是旋转不变的,因为对图像做旋转操作等价与上面8种移位的过程了,而8种情况都对应同一个值,即8个值中的最小值15,即拥有了旋转不变特性。
数学公式
LBP值计算方式与原始的LBP一样,这里不做赘述。
区别在于对LBP的结果进行二进制编码,并做循环位移,取所有结果中最小的那个值:
L
B
P
r
o
t
P
,
R
=
min
{
R
O
R
(
L
B
P
P
,
R
,
i
)
|
i
=
0
,
.
.
.
,
P
−
1
}
L
B
P
P
,
R
r
o
t
=
min
{
R
O
R
(
L
B
P
P
,
R
,
i
)
|
i
=
0
,
.
.
.
,
P
−
1
}
程序实现
先定义计算旋转后灰度值的函数,以保证旋转不变的结果:
def value_rotation(num):
value_list = np.zeros((8), np.uint8)
temp = int(num)
value_list[0] = temp
for i in range(7):
temp = ((temp << 1) | (temp / 128)) % 256
value_list[i+1] = temp
return np.min(value_list)定义旋转不变LBP主体函数:
def rotation_invariant_LBP(src):
height = src.shape[0]
width = src.shape[1]
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
# 旋转不变值
dst[y, x] = value_rotation(lbp)
return dst
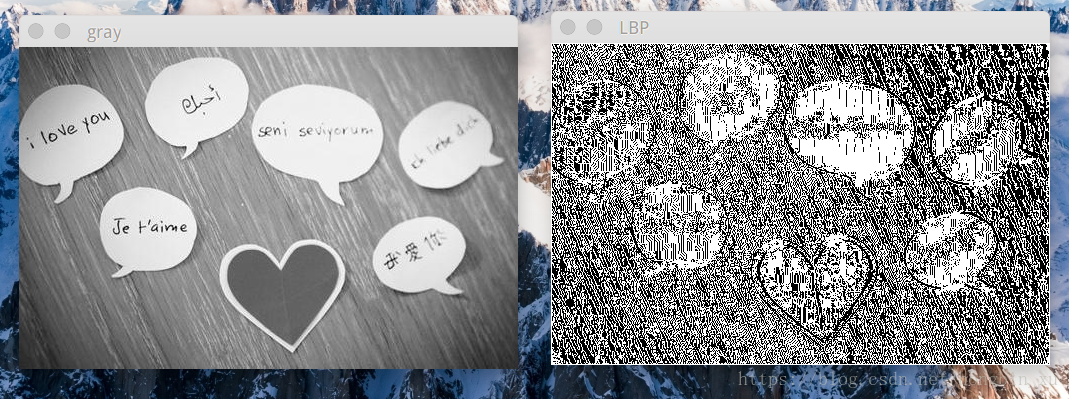
运行结果
4、均匀模式LBP(uniform LBP)
概念
基本LBP算子可以产生8位二进制数对应的
2
8
−
1
2
8
−
1
种模式,对于半径为
R
R
的圆形区域内含有
个采样点,会有
2
P
−
1
2
P
−
1
种模式。很显然,随着采样点数
P
P
的增加,二进制模式的种类是呈指数趋势增长的。过多的二进制模式对于纹理的表达是不利的,过于复杂且庞大的信息量,很明显违背了提取特征信息的初衷,我们需要的只是尽可能少且具有代表性的特征,因此需要对LBP得到的二进制模式种类进行降维,使用更少的数据量来最好地表示图像的信息。而这种降维的方法就是uniform LBP。
均匀模式LBP(uniform LBP),就是限制一个二进制序列从0到1或从1到0的跳变次数不超过2次。
为解决二进制模式过多的问题,提高统计性,Ojala提出了采用一种“等价模式”(Uniform Pattern)来对LBP算子的模式种类进行降维。Ojala等认为,在实际图像中,绝大多数LBP模式最多只包含两次从1到0或从0到1的跳变。因此,Ojala将“等价模式”定义为:当某个LBP所对应的循环二进制数从0到1或从1到0最多有两次跳变时,该LBP所对应的二进制就称为一个等价模式类。如00000000(0次跳变),00000111(只含一次从0到1的跳变),10001111(先由1跳到0,再由0跳到1,共两次跳变)都是等价模式类。除等价模式类以外的模式都归为另一类,称为混合模式类,例如10010111(共四次跳变)。通过这样的改进,二进制模式的种类大大减少,而不会丢失任何信息。模式数量由原来的2P种减少为 P ( P-1)+2种,其中P表示邻域集内的采样点数。对于3×3邻域内8个采样点来说,二进制模式由原始的256种减少为58种,即:它把值分为59类,58个uniform pattern为一类,其它的所有值为第59类。这样直方图从原来的256维变成59维。这使得特征向量的维数更少,并且可以减少高频噪声带来的影响。
数学公式
上式目的就是统计二进制数的跳变次数。
跳变次数小于等于2,则各自代表一类,跳变次数大于2的所有情况归为一类。
程序实现
为简便起见,我是在原始LBP的基础之上做uniform LBP的。所以总共会有8位二进制数,跳变数量小于2的模式共有58种,加上剩余的所有模式归为一种,加起来共59种。我将跳变数量小于2的模式分别定义为1-58,剩余的情况,即第59中情况,定义为0。
计算跳变次数的函数:
def getHopCnt(num):
'''
:param num:8位的整形数,0-255
:return:
'''
if num > 255:
num = 255
elif num < 0:
num = 0
num_b = bin(num)
num_b = str(num_b)[2:]
# 补0
if len(num_b) < 8:
temp = []
for i in range(8-len(num_b)):
temp.append('0')
temp.extend(num_b)
num_b = temp
cnt = 0
for i in range(8):
if i == 0:
former = num_b[-1]
else:
former = num_b[i-1]
if former == num_b[i]:
pass
else:
cnt += 1
return cnt归一化函数,将像素值归一化,并重新投影到新的灰度空间,默认最大值为255,最小值为0:
def img_max_min_normalization(src, min=0, max=255):
height = src.shape[0]
width = src.shape[1]
if len(src.shape) > 2:
channel = src.shape[2]
else:
channel = 1
src_min = np.min(src)
src_max = np.max(src)
if channel == 1:
dst = np.zeros([height, width], dtype=np.float32)
for h in range(height):
for w in range(width):
dst[h, w] = float(src[h, w] - src_min) / float(src_max - src_min) * (max - min) + min
else:
dst = np.zeros([height, width, channel], dtype=np.float32)
for c in range(channel):
for h in range(height):
for w in range(width):
dst[h, w, c] = float(src[h, w, c] - src_min) / float(src_max - src_min) * (max - min) + min
return dstuniform LBP的主体函数:其中norm表示是否要进行归一化,因为使用uniform LBP出来的值是0-58的,显示效果可能不明显。
def uniform_LBP(src, norm=True):
'''
:param src:原始图像
:param norm:是否做归一化到【0-255】的灰度空间
:return:
'''
table = np.zeros((256), dtype=np.uint8)
temp = 1
for i in range(256):
if getHopCnt(i) <= 2:
table[i] = temp
temp += 1
height = src.shape[0]
width = src.shape[1]
dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = table[lbp]
if norm is True:
return img_max_min_normalization(dst)
else:
return dst
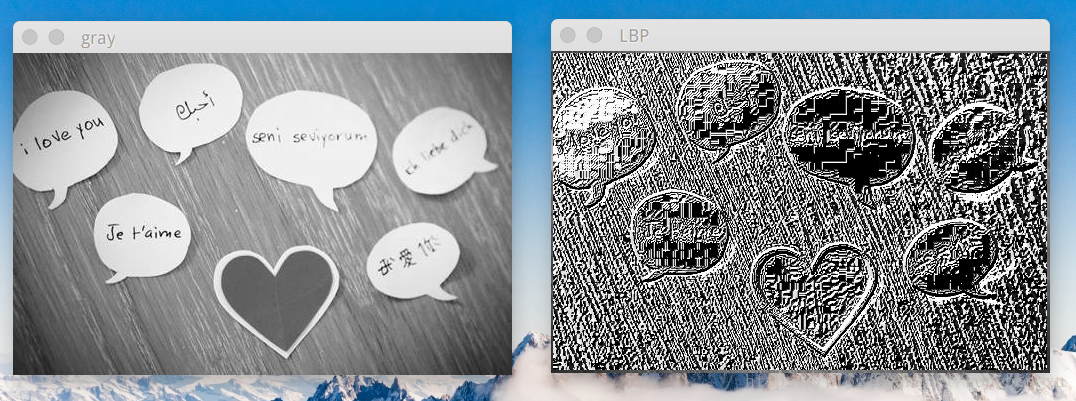
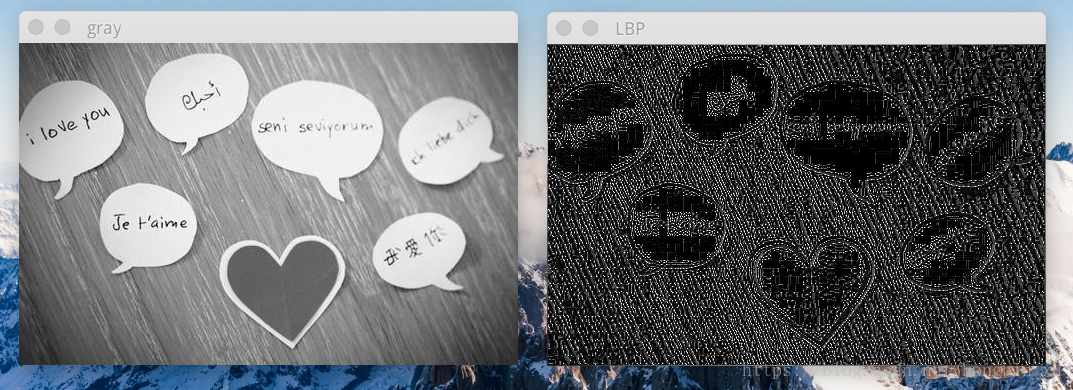
运行结果
5、均匀模式+旋转不变模式LBP
概念
使用uniform LBP加上旋转不变模式LBP来提取特征,概念上面都介绍了,无非就是叠加起来而已。
数学公式
先计算跳变次数:
U
(
L
B
P
P
,
R
)
=
|
s
[
I
(
P
−
1
)
−
I
(
c
)
]
−
s
[
I
(
0
)
−
I
(
c
)
]
|
+
|
∑
p
=
1
P
−
1
s
[
I
(
p
)
−
I
(
c
)
]
−
s
[
I
(
p
−
1
)
−
I
(
c
)
]
|
U
(
L
B
P
P
,
R
)
=
|
s
[
I
(
P
−
1
)
−
I
(
c
)
]
−
s
[
I
(
0
)
−
I
(
c
)
]
|
+
|
∑
p
=
1
P
−
1
s
[
I
(
p
)
−
I
(
c
)
]
−
s
[
I
(
p
−
1
)
−
I
(
c
)
]
|
跳变次数小于等于2,则各自代表一类,跳变次数大于2的所有情况归为一类。得到的结果设为
L
B
P
u
n
i
P
,
R
L
B
P
P
,
R
u
n
i
。
再对其二进制编码做循环移位,求出最小值。
L
B
P
r
o
t
,
u
n
i
P
,
R
=
min
{
R
O
R
(
L
B
P
u
n
i
P
,
R
,
i
)
|
i
=
0
,
.
.
.
,
P
−
1
}
L
B
P
P
,
R
r
o
t
,
u
n
i
=
min
{
R
O
R
(
L
B
P
P
,
R
u
n
i
,
i
)
|
i
=
0
,
.
.
.
,
P
−
1
}
程序实现
def rotation_invariant_uniform_LBP(src):
table = np.zeros((256), dtype=np.uint8)
temp = 1
for i in range(256):
if getHopCnt(i) <= 2:
table[i] = temp
temp += 1
height = src.shape[0]
width = src.shape[1]
dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = table[lbp]
dst = img_max_min_normalization(dst)
for x in range(width):
for y in range(height):
dst[y, x] = value_rotation(dst[y, x])
return dst
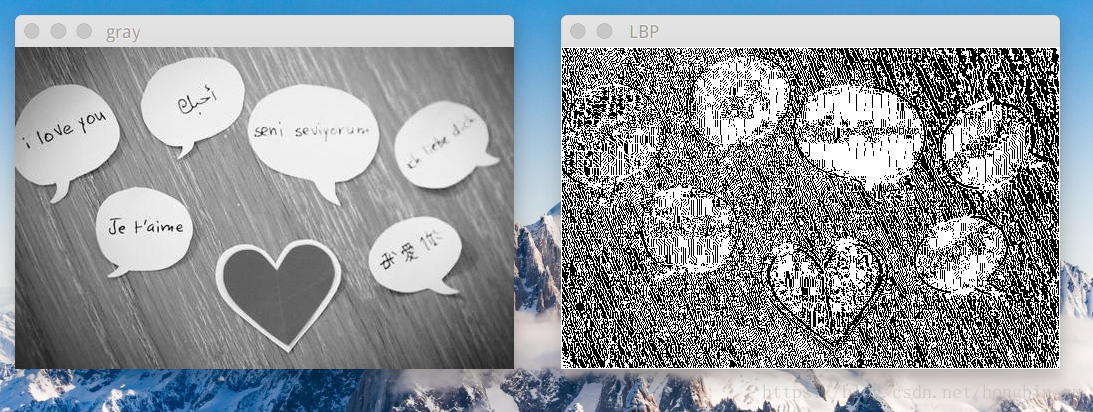
运行结果
后记
这篇博客中总结了几种经典的LBP算子:原始LBP算子、圆形LBP算子、旋转不变模式LBP算子、均匀模式LBP算子(uniform LBP)、均匀模式+旋转不变模式LBP算子。LBP算子的原理不难,程序实现也很容易,但是功能确也很强大,用处还是很广的。下次有时间再整理一下其他变种形式的LBP。
参考资料:
-
https://blog.csdn.net/u014114990/article/details/50913592
-
https://blog.csdn.net/matrix_space/article/details/50481641
-
https://blog.csdn.net/zouxy09/article/details/7929531
-
http://blog.163.com/yuyang_tech/blog/static/21605008320138642618253/
-
https://www.2cto.com/kf/201712/705037.html
附录:完整代码
# *_*coding:utf-8 *_*
# author: 许鸿斌
# 经典LBP算法复现:原始LBP、Uniform LBP、旋转不变LBP、旋转不变的Uniform LBP
import numpy as np
import cv2
import matplotlib.pyplot as plt
import math
def LBP(src):
'''
:param src:灰度图像
:return:
'''
height = src.shape[0]
width = src.shape[1]
# dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1,8), dtype=np.uint8)
neighbours = np.zeros((1,8), dtype=np.uint8)
for x in range(1, width-1):
for y in range(1, height-1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = lbp
return dst
def getHopCnt(num):
'''
:param num:8位的整形数,0-255
:return:
'''
if num > 255:
num = 255
elif num < 0:
num = 0
num_b = bin(num)
num_b = str(num_b)[2:]
# 补0
if len(num_b) < 8:
temp = []
for i in range(8-len(num_b)):
temp.append('0')
temp.extend(num_b)
num_b = temp
cnt = 0
for i in range(8):
if i == 0:
former = num_b[-1]
else:
former = num_b[i-1]
if former == num_b[i]:
pass
else:
cnt += 1
return cnt
def uniform_LBP(src, norm=True):
'''
:param src:原始图像
:param norm:是否做归一化到【0-255】的灰度空间
:return:
'''
table = np.zeros((256), dtype=np.uint8)
temp = 1
for i in range(256):
if getHopCnt(i) <= 2:
table[i] = temp
temp += 1
height = src.shape[0]
width = src.shape[1]
dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = table[lbp]
if norm is True:
return img_max_min_normalization(dst)
else:
return dst
def img_max_min_normalization(src, min=0, max=255):
height = src.shape[0]
width = src.shape[1]
if len(src.shape) > 2:
channel = src.shape[2]
else:
channel = 1
src_min = np.min(src)
src_max = np.max(src)
if channel == 1:
dst = np.zeros([height, width], dtype=np.float32)
for h in range(height):
for w in range(width):
dst[h, w] = float(src[h, w] - src_min) / float(src_max - src_min) * (max - min) + min
else:
dst = np.zeros([height, width, channel], dtype=np.float32)
for c in range(channel):
for h in range(height):
for w in range(width):
dst[h, w, c] = float(src[h, w, c] - src_min) / float(src_max - src_min) * (max - min) + min
return dst
def value_rotation(num):
value_list = np.zeros((8), np.uint8)
temp = int(num)
value_list[0] = temp
for i in range(7):
temp = ((temp << 1) | (temp / 128)) % 256
value_list[i+1] = temp
return np.min(value_list)
def rotation_invariant_LBP(src):
height = src.shape[0]
width = src.shape[1]
# dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = value_rotation(lbp)
return dst
def rotation_invariant_uniform_LBP(src):
table = np.zeros((256), dtype=np.uint8)
temp = 1
for i in range(256):
if getHopCnt(i) <= 2:
table[i] = temp
temp += 1
height = src.shape[0]
width = src.shape[1]
dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
lbp_value = np.zeros((1, 8), dtype=np.uint8)
neighbours = np.zeros((1, 8), dtype=np.uint8)
for x in range(1, width - 1):
for y in range(1, height - 1):
neighbours[0, 0] = src[y - 1, x - 1]
neighbours[0, 1] = src[y - 1, x]
neighbours[0, 2] = src[y - 1, x + 1]
neighbours[0, 3] = src[y, x - 1]
neighbours[0, 4] = src[y, x + 1]
neighbours[0, 5] = src[y + 1, x - 1]
neighbours[0, 6] = src[y + 1, x]
neighbours[0, 7] = src[y + 1, x + 1]
center = src[y, x]
for i in range(8):
if neighbours[0, i] > center:
lbp_value[0, i] = 1
else:
lbp_value[0, i] = 0
lbp = lbp_value[0, 0] * 1 + lbp_value[0, 1] * 2 + lbp_value[0, 2] * 4 + lbp_value[0, 3] * 8 \
+ lbp_value[0, 4] * 16 + lbp_value[0, 5] * 32 + lbp_value[0, 6] * 64 + lbp_value[0, 0] * 128
dst[y, x] = table[lbp]
dst = img_max_min_normalization(dst)
for x in range(width):
for y in range(height):
dst[y, x] = value_rotation(dst[y, x])
return dst
def circular_LBP(src, radius, n_points):
height = src.shape[0]
width = src.shape[1]
# dst = np.zeros([height, width], dtype=np.uint8)
dst = src.copy()
src.astype(dtype=np.float32)
dst.astype(dtype=np.float32)
neighbours = np.zeros((1, n_points), dtype=np.uint8)
lbp_value = np.zeros((1, n_points), dtype=np.uint8)
for x in range(radius, width - radius - 1):
for y in range(radius, height - radius - 1):
lbp = 0.
for n in range(n_points):
theta = float(2 * np.pi * n) / n_points
x_n = x + radius * np.cos(theta)
y_n = y - radius * np.sin(theta)
# 向下取整
x1 = int(math.floor(x_n))
y1 = int(math.floor(y_n))
# 向上取整
x2 = int(math.ceil(x_n))
y2 = int(math.ceil(y_n))
# 将坐标映射到0-1之间
tx = np.abs(x - x1)
ty = np.abs(y - y1)
# 根据0-1之间的x,y的权重计算公式计算权重
w1 = (1 - tx) * (1 - ty)
w2 = tx * (1 - ty)
w3 = (1 - tx) * ty
w4 = tx * ty
# 根据双线性插值公式计算第k个采样点的灰度值
neighbour = src[y1, x1] * w1 + src[y2, x1] * w2 + src[y1, x2] * w3 + src[y2, x2] * w4
neighbours[0, n] = neighbour
center = src[y, x]
# print('center:{}; neighbours:{}'.format(center, neighbours))
for n in range(n_points):
if neighbours[0, n] > center:
lbp_value[0, n] = 1
else:
lbp_value[0, n] = 0
# print('lbp_value:{}'.format(lbp_value))
for n in range(n_points):
lbp += lbp_value[0, n] * 2**n
# print('lbp_value[0, n] * 2**n : {}'.format(lbp_value[0, n] * 2**n))
# print('lbp_value transformed:{}'.format(lbp))
dst[y, x] = int(lbp / (2**n_points-1) * 255)
# print('dst value of [{}, {}]:{}'.format(y, x, dst[y,x]))
return dst
def disp_test_result(img, gray, dst, mode=0):
'''
:param mode:0,opencv显示图片;1,matplotlib显示图片。
:return:
'''
if mode == 0:
cv2.imshow('src', img)
cv2.imshow('gray', gray)
cv2.imshow('LBP', dst)
cv2.waitKey()
cv2.destroyAllWindows()
else:
plt.figure()
plt.subplot(131)
plt.imshow(img)
plt.title('src')
plt.subplot(132)
plt.imshow(gray, cmap='gray')
plt.title('gray')
plt.subplot(133)
plt.imshow(dst, cmap='gray')
plt.title('LBP')
plt.show()
if __name__ == '__main__':
img = cv2.imread('test.jpg')
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# dst = LBP(gray)
dst1 = uniform_LBP(gray)
# dst2 = rotation_invariant_LBP(gray)
dst3 = rotation_invariant_uniform_LBP(gray)
# dst4 = circular_LBP(gray, radius=4, n_points=16)
# disp_test_result(img, gray, dst, mode=0)
disp_test_result(img, gray, dst1, mode=0)
# disp_test_result(img, gray, dst2, mode=0)
# disp_test_result(img, gray, dst3, mode=0)
# disp_test_result(img, gray, dst4, mode=0)