2020
-
PVN3D
[CVPR 2020]
PVN3D: A Deep Point-wise 3D Keypoints Voting Network for 6DoF Pose Estimation.
[ arXiv, Code]
PVN3Dhttps://www.zhihu.com/video/1232768319741755392
-
6-PACK
[ICRA 2020]
6-PACK: Category-level 6D Pose Tracker with Anchor-Based Keypoints.
[Project, arXiv, Code]

2019
-
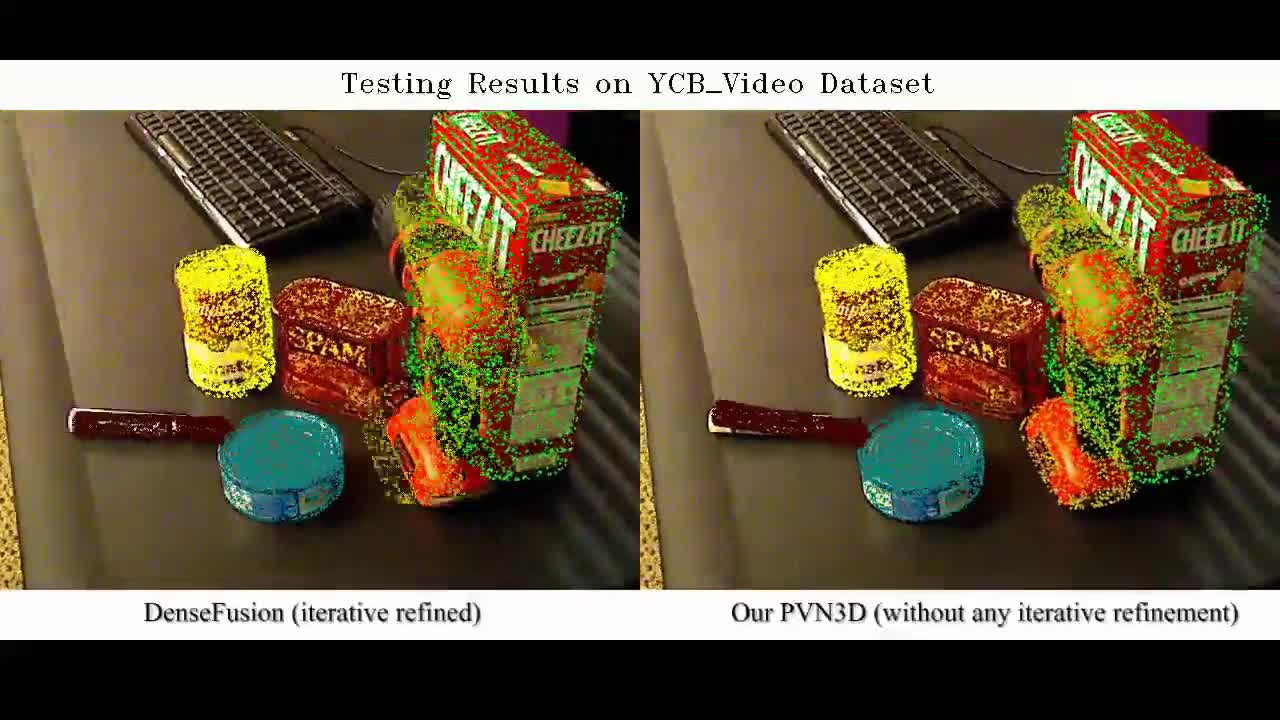
DenseFusion
[CVPR 2019]
DenseFusion: 6D Object Pose Estimation by Iterative Dense Fusion.
[ Project , arXiv, Code ]
DenseFusionhttps://www.zhihu.com/video/1183137845279178752
-
NOCS
[CVPR 2019]
Normalized Object Coordinate Space for Category-Level 6D Object Pose and Size Estimation.
[ Project, arXiv, Code]
NOCShttps://www.zhihu.com/video/1183138656461701120
-
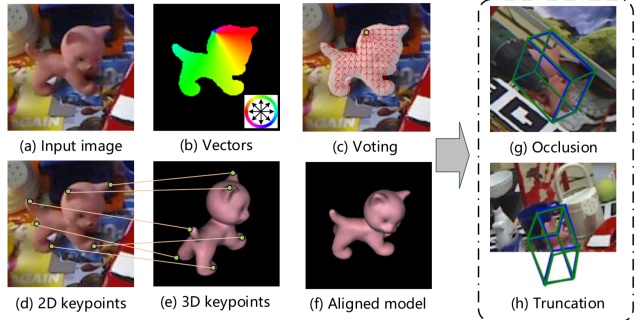
PVNet
[CVPR 2019]
PVNet: Pixel-wise Voting Network for 6DoF Pose Estimation.
[ Project, arXiv, Code]
PVNethttps://www.zhihu.com/video/1183138854776827904
论文作者的知乎帖:
彭思达:浙大CAD&CG实验室提出PVNet,实时且效果超群,已开源zhuanlan.zhihu.com
-
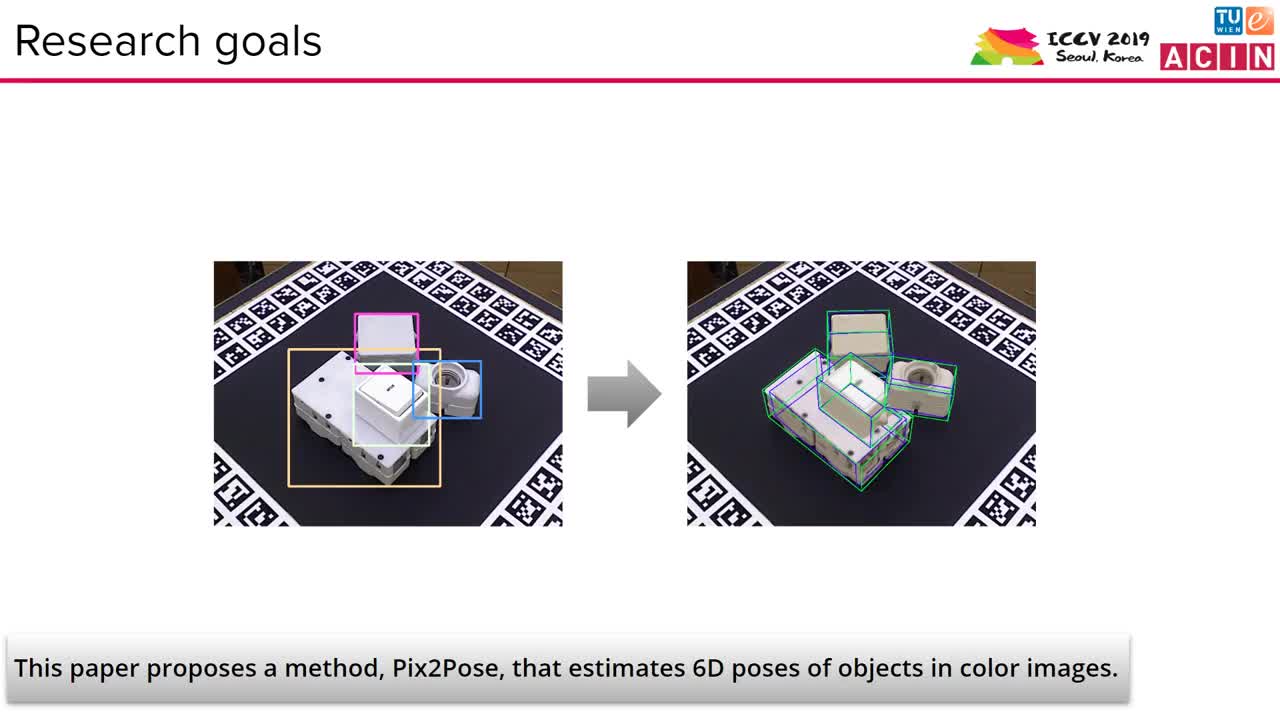
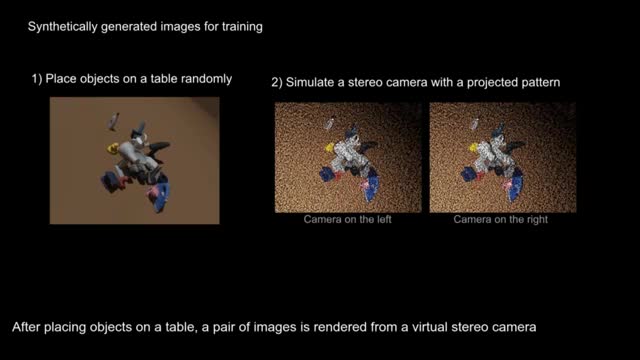
Pix2Pose
[ICCV 2019]
Pix2Pose: Pixel-Wise Coordinate Regression of Objects for 6D Pose Estimation.
[ arXiv, Code]
Pix2Posehttps://www.zhihu.com/video/1233157174483632128
-
MTTM
[ICRA 2019]
Multi-Task Template Matching for Object Detection, Segmentation and Pose Estimation Using Depth Images.
[ Paper ]
MTTMhttps://www.zhihu.com/video/1233332378149326848
2018
-
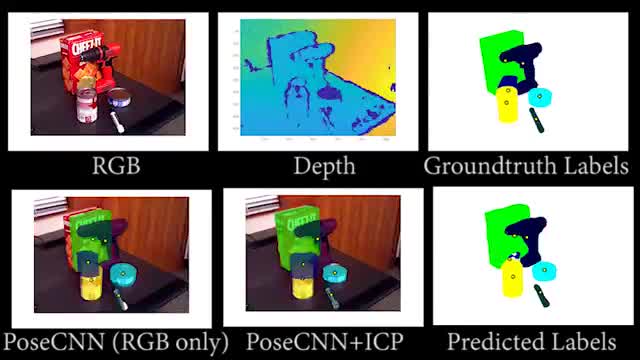
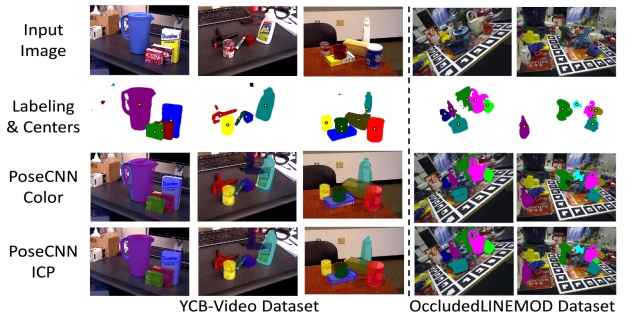
PoseCNN
[RSS 2018]
PoseCNN: A Convolutional Neural Network for 6D Object Pose Estimation in Cluttered Scenes.
[ Project, arXiv, Code, YCB-Video Datasets Toolbox ]
PoseCNNhttps://www.zhihu.com/video/1183140676269801472
YCB-video 数据集简介:
丁洪凯:位姿估计数据集 YCB-Video Datasetzhuanlan.zhihu.com
-
DOPE
[CoRL 2018]
Deep Object Pose Estimation for Semantic Robotic Grasping of Household Objects.
[ Project, arXiv, Code ]
DOPEhttps://www.zhihu.com/video/1183139670938075136
-
DeepIM
[ECCV 2018]
DeepIM: Deep Iterative Matching for 6D Pose Estimation.
[ Project, arXiv, Code]
DeepIM: Deep Iterative Matching for 6D Pose Estimation_哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com

DeepIM: Deep Iterative Matching for 6D Pose Estimation (ECCV 2018)_哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com
2017
-
SSD-6D
[ICCV 2017]
SSD-6D: Making RGB-based 3D detection and 6D pose estimation great again.
[ arXiv, Code ]
SSD-6D: Making RGB-Based 3D Detection and 6D Pose Estimation Great Again._哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com
SSD6D – Supplementary Video_哔哩哔哩 (゜-゜)つロ 干杯~-bilibiliwww.bilibili.com

-
BB8
[ICCV 2017]
BB8: A Scalable, Accurate, Robust to Partial Occlusion Method for Predicting the 3D Poses of Challenging Objects without Using Depth.
[ arXiv ]
经典的 Linemod
[1]. Multimodal Templates for Real-Time Detection of Texture-less Objects in Heavily Cluttered Scenes, IEEE International Conference on Computer Vision (ICCV), 2011.
[2]. Gradient Response Maps for Real-Time Detection of Texture-Less Objects. IEEE TRANSACTIONS ON PATTERN ANALYSIS AND MACHINE INTELLIGENCE, 2012.
[3]. Model Based Training, Detection and Pose Estimation of Texture-Less 3D Objects in Heavily Cluttered Scenes. [PDF ]
作者 Stefan Hinterstoisser 的个人网站:
http://campar.in.tum.de/Main/StefanHinterstoissercampar.in.tum.de
OpenCV 实现:
集成在 contrib 模块中
https://github.com/opencv/opencv_contrib/blob/master/modules/rgbd/src/linemod.cppgithub.com
ROS 实现:
集成在 Object Recognition Kitchen (ORK) 库中,是基于 OpenCV Linemod 实现
Object Recognition Kitchenwg-perception.github.io
ROS kinetic + Realsens D435i + ORK + LINEMOD 物体识别www.cnblogs.com

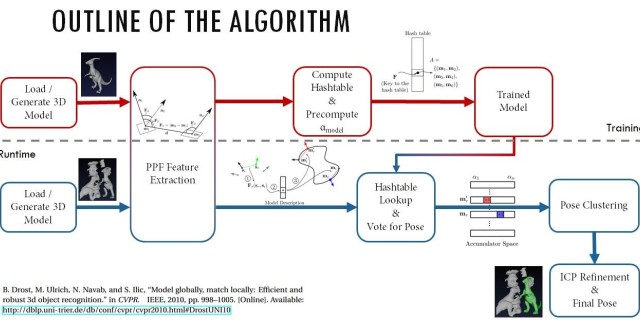
PPF
Model globally, match locally: Efficient and robust 3D object recognition. CVPR, 2010.
丁洪凯:【6D位姿估计】Point Pair Feature (PPF)zhuanlan.zhihu.com
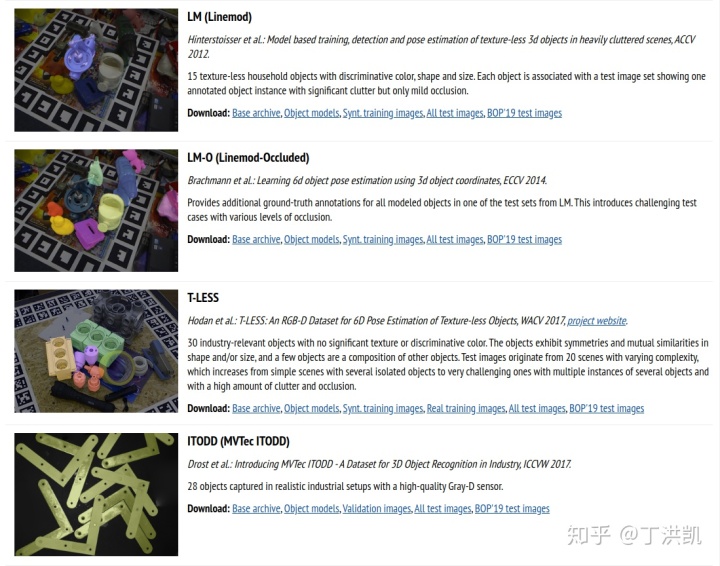
Benchmark
- BOP: Benchmark for 6D Object Pose Estimation
[ Project, Paper, BOP_Toolkit ]
部分数据集: