定义
强化学习(Reinforcement Learning,RL)是智能体(Agent)为了最大化长期回报(Return)的期望,通过观察系统环境,不断试错(Trial-and-Error)进行学习的过程。
从强化学习的定义可以看出,强化学习具有两个最主要的特征:
- 通过不断试错来学习;
- 追求长期回报的最大化。
强化学习的框架一般包含5个构成要素,包括:
- 环境(Environment);
- 智能体(Agent);
- 观察(Observation);
- 行动(Action);
- 奖励(Reward)。
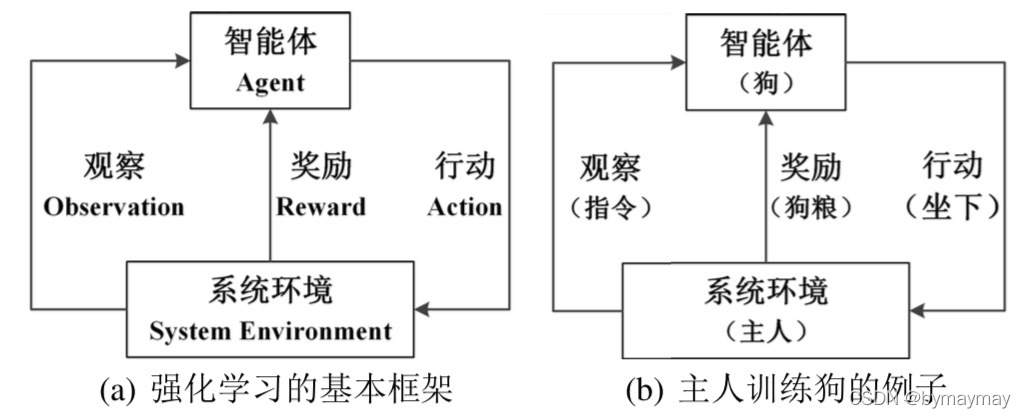
强化学习的基本框架如下图 (a) 所示,智能体对系统环境进行观察后产生行动,从系统环境中获得相应的奖励,智能体观察系统对自己上一次行动的奖励信号后,重新调整自己的下一次的行动策略。下图 (b) 展示了主人训练狗的过程就是强化学习过程的一个简单例子。主人想训练狗听从自己的指令,如果狗听从指令,产生了正确的行动,则主人会喂狗粮;如果狗未听从指令,产生了错误的行动,则狗得不到狗粮。在这个强化学习的例子中,主人充当着系统环境的角色,狗是智能体。狗(智能体)通过对主人(系统环境)的指令观察,产生相应的行动,狗粮就是主人对狗行动的奖励。
完全观测与不完全观测
上述框架是站在上帝视角描述问题,而强化学习的概念默认是站在智能体的角度看问题。
在
t t
t
时刻,系统环境的实际状态记为
S t e S^e_t
S
t
e
,智能体观测到的系统状态记为
S t a S^a_t
S
t
a
。智能体对系统状态的观测可以分为两种情况:
- 完全观测(Full Observability);
- 不完全观测(Partial Observability)。
完全观测
O t O_t
O
t
指的是智能体观测到的状态
S t a S^a_t
S
t
a
就是系统真实的全局状态
S t e S^e_t
S
t
e
,即完全观测
O t = S t a = S t e O_t=S^a_t=S^e_t
O
t
=
S
t
a
=
S
t
e
。
不完全观测
O ~ t \tilde{O}_t
O
~
t
指的是智能体只能观测到系统的局部状态,即不完全观测
O ~ = S t a ≠ S t e \tilde{O}=S^a_t\neq S^e_t
O
~
=
S
t
a
=
S
t
e
。
在接下来的内容中,除非特别说明,智能体对系统环境的观察都属于完全观测。
在完全观测的情况下,将智能体观察到的状态
S t a S^a_t
S
t
a
和系统真实的全局状态
S t e S^e_t
S
t
e
统一简称为状态(State)。
在
t t
t
时刻,智能体观测到系统环境的状态
S t S_t
S
t
,并产生相应的行动
A t A_t
A
t
,系统会在一下个时刻
t + 1 t+1