
这是自动化圈的第
6
篇文章。
本文介绍的运动学概念,是学习工业机器人的必须清楚的概念。尤其是在处理视觉问题时。运动学主要研究的问题是确定机器人在空间中的位置,只有知道机器人在什么位置,机器人控制柜里的CPU才能去控制机器人。机器人运动学的可分为两个基本问题:正运动和逆运动。正向运动学即给定机器人各关节变量,计算机器人末端的位置姿态;逆向运动学即已知机器人末端的位置姿态,计算机器人对应位置的全部关节变量,逆问题求解比较困难。
自由度
自由度通俗来讲就是描述物体运动的灵活程度,任何一个没有受约束的物体,在空间均具有6个独立的运动。
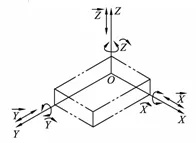
以上图的长方形为例,它在直角坐标系OXYZ中可以有3个平移运动和3个转动。3个平移运动分别是沿X,Y,Z轴的平移运动,3个转动分别是绕X,Y,Z轴的转动。习惯上把上述6个独立运动称做6个自由度。
版权声明:本文为weixin_32364135原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。