1. 终端 terminator
添加仓库/软件源
如显示禁用该源,尝试直接第3步进行安装。
sudo add-apt-repository ppa:gnome-terminator
更新源
sudo apt update
安装 terminator
sudo apt install terminator
快捷键

2.截屏工具flameshot
安装:
sudo apt-get install flameshot
启动:
flameshot gui

配置flameshot快捷键:
但是每次使用命令调用flameshot来截图,都很不方便。这里就需要为命令设置快捷键了
ubuntu 18 绑定快捷键的步骤如下:
1)打开设置->设备->键盘。

2.在最下方,点击 + 按钮就可以添加快捷键,如我设置Ctrl+1

3.修改ubuntu桌面分辨率方法
ubuntu初始化桌面很大
刚进入ubuntu系统发现桌面很大,查看屏幕分辨率为800×600,并且在设置处无法更改分辨率
解决方法:
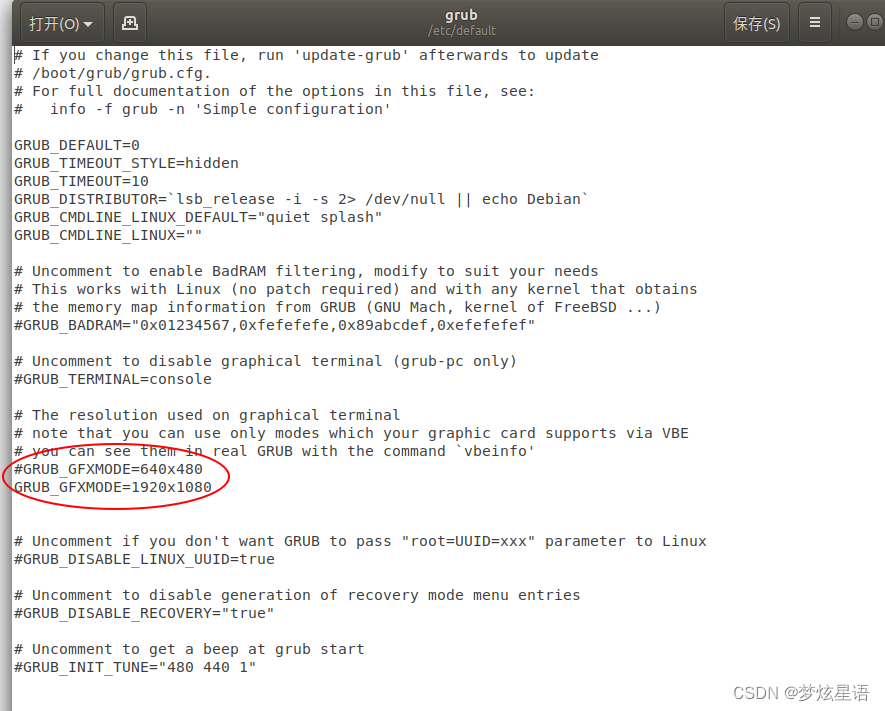
3.1.打开文件:/etc/default/grub
sudo gedit /etc/default/grub
3.2.找到GRUB_GFXMODE=800×600这句,并在后面添加:
GRUB_GFXMODE=1920x1080 #可以将1920x1080修改为自己合适的分辨率
3.3.关闭文件,在终端执行:
sudo update-grub
3.4.在终端重启系统
sudo reboot
4.安装VScode
参考
b站课程中一小节
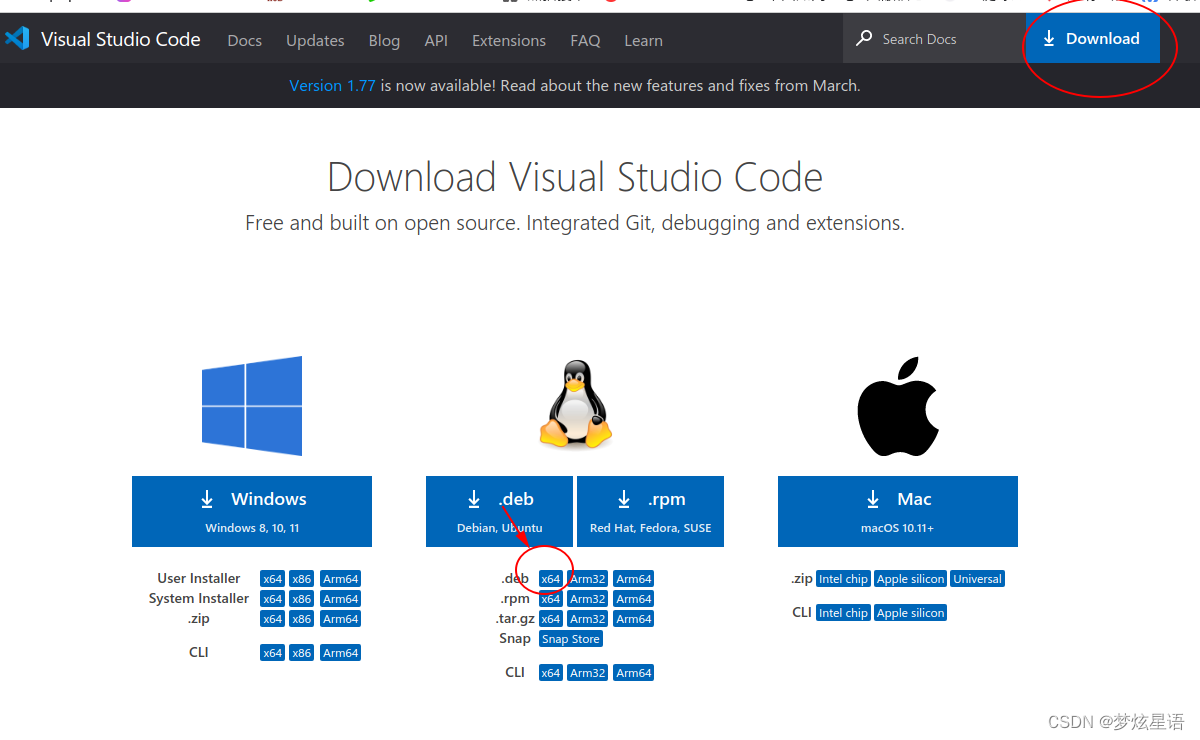
4.1 下载
4.2 安装与卸载
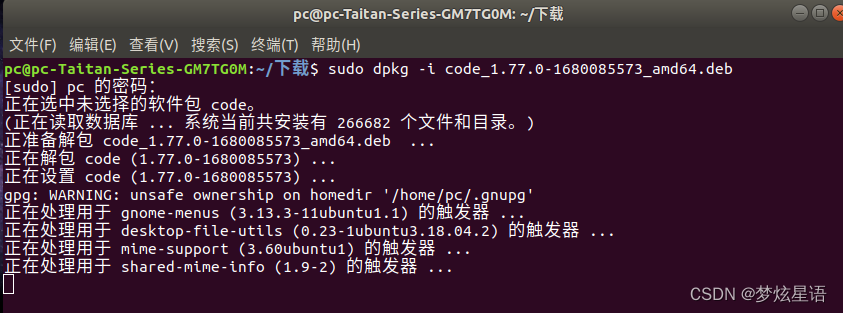
安装(挺耗时):打开文件安装目录,执行:
sudo dpkg -i xxxx.deb
后面不需要时的卸载指令:
sudo dpkg --purge code
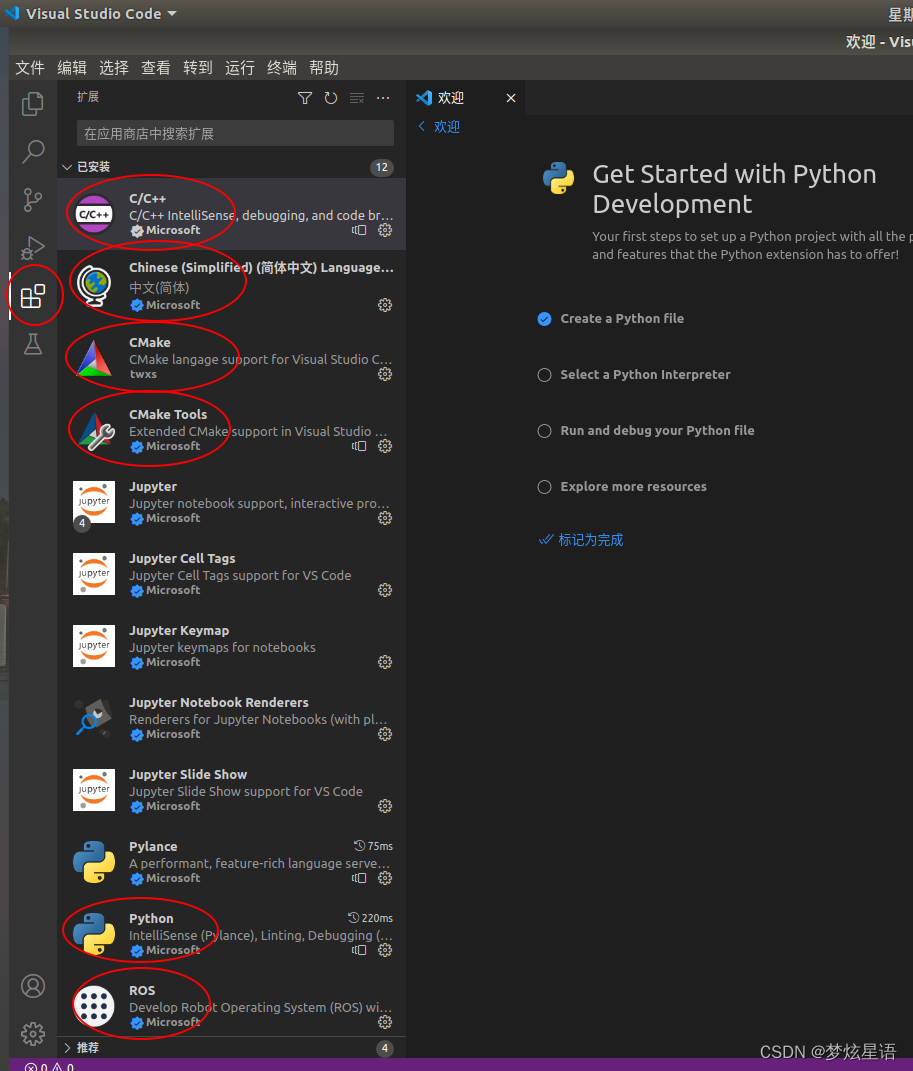
4.3 vscode 集成 ROS 插件
点击左侧插件,搜索然后install就好
4.4 vscode 使用_基本配置
参考:
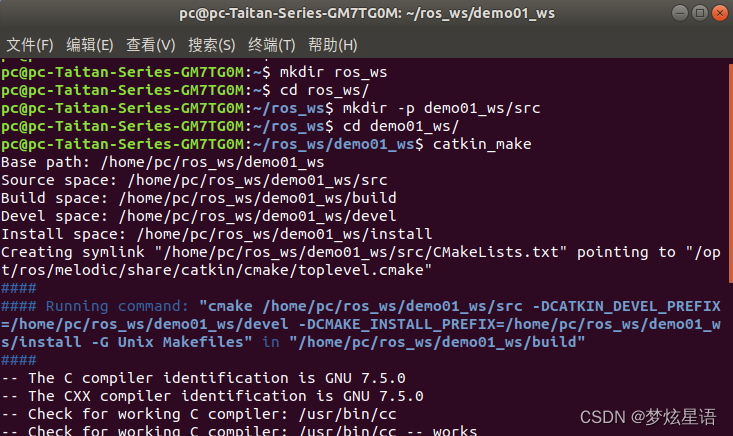
4.4.1 创建 ROS 工作空间
mkdir -p xxx_ws/src #必须得有 src
cd xxx_ws
catkin_make
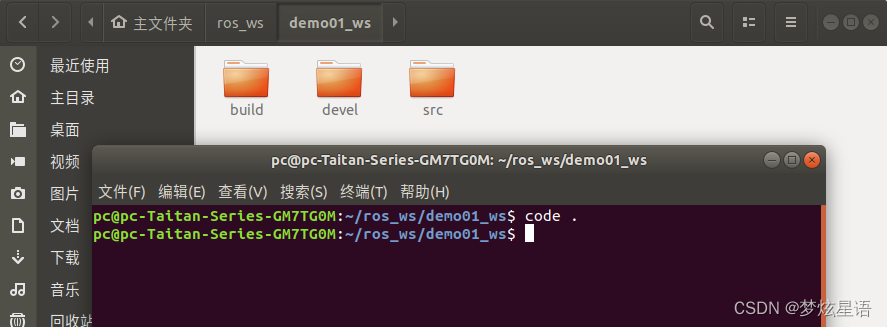
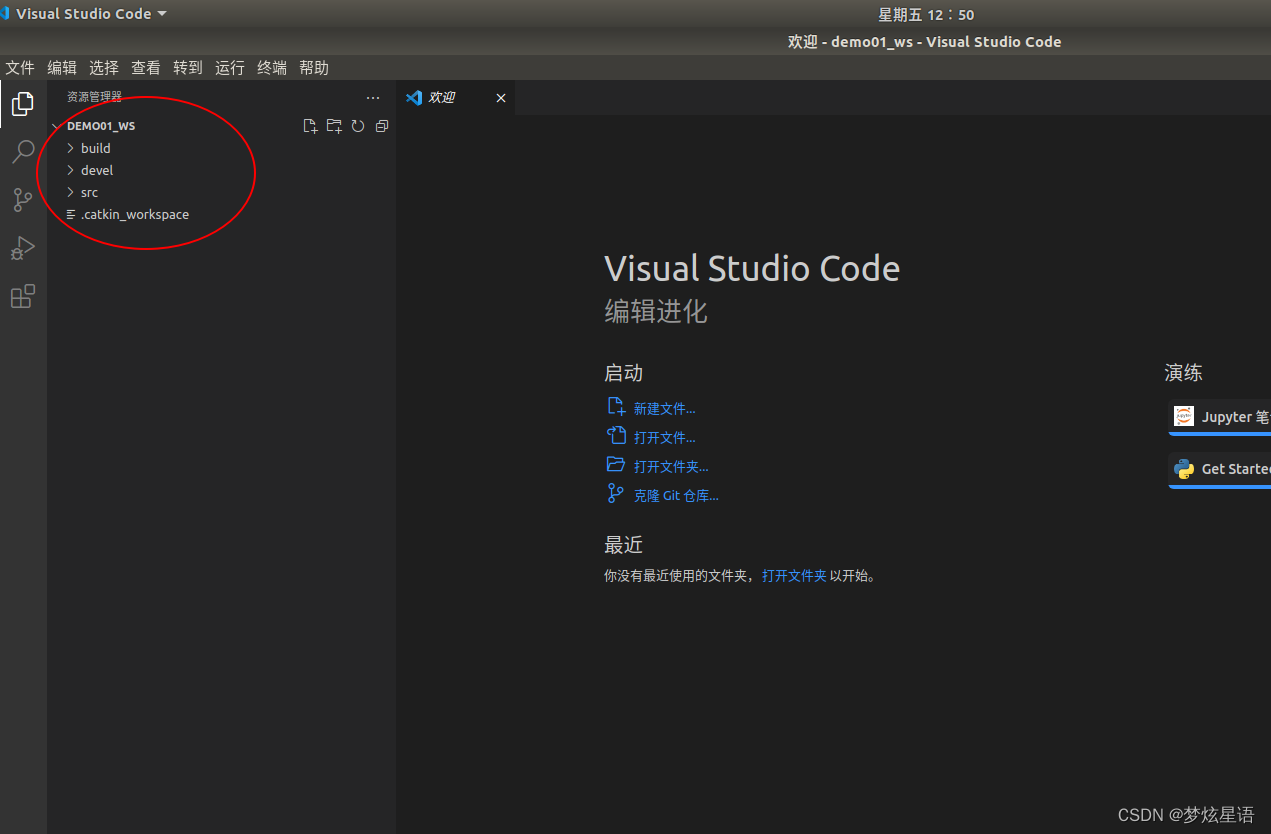
4.4.2 启动 vscode
进入 xxx_ws 启动 vscode
cd xxx_ws
code .
我的在主文件夹中创建了ros_ws文件夹,然后再创建ros的工作空间demo_xx
4.43 vscode 中编译 ros
快捷键 ctrl + shift + B 调用编译,选择 : catkin_make:build 后面小齿轮
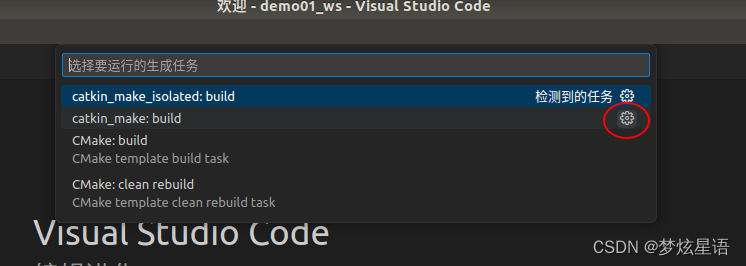
可以点击配置设置为默认,修改.vscode/tasks.json 文件
{
// 有关 tasks.json 格式的文档,请参见
// https://go.microsoft.com/fwlink/?LinkId=733558
"version": "2.0.0",
"tasks": [
{
"label": "catkin_make:debug", //代表提示的描述性信息
"type": "shell", //可以选择shell或者process,如果是shell代码是在shell里面运行一个命令,如果是process代表作为一个进程来运行
"command": "catkin_make",//这个是我们需要运行的命令
"args": [],//如果需要在命令后面加一些后缀,可以写在这里,比如-DCATKIN_WHITELIST_PACKAGES=“pac1;pac2”
"group": {"kind":"build","isDefault":true},
"presentation": {
"reveal": "always"//可选always或者silence,代表是否输出信息
},
"problemMatcher": "$msCompile"
}
]
}
4.4 创建 ROS 功能包
选定 src 右击 —> create catkin package
设置包名 添加依赖
5. Ubuntu 安装 Gif 工具 – Peek
5.1 添加Peek的ppa源
sudo add-apt-repository ppa:peek-developers/stable
5.2 更新源
sudo apt-get update
5.3 安装Peek
sudo apt-get install peek
打开peek,界面只有录制GIF、停止,录制之后选择保存路径保存就OK。