转:http://blog.csdn.net/zgkxzx/article/details/56980769
前言
gslx680电容触摸屏是一种目前Android嵌入式设备中比较常用的触摸屏类型。这里我们以Exynos4412为Android bsp平台,移植一款gslx680电容触摸屏。
关于电容触摸屏的原理,这里不进行讲解,不明白的,可以参照一下博客:
http://blog.csdn.net/xubin341719/article/details/7820492
这里只从实际工程出发,讲解移植过程。谢谢~~
一、具体操作配置
1.添加GSLX68X到内核的Kconfig配置
路径:xxx/kernel/drivers/input/touchscreen/Kconfig

2.编写Makefile文件
路径:xxx/kernel/drivers/input/touchscreen/Makefile

3.在触摸屏驱动目录xxx/kernel/drivers/input/touchscreen/文件夹下,添加一下文件:
gslx680.c
gslx680.h
gsl_point_id
查看附件
注意:gsl_point_id是一个Linux库文件
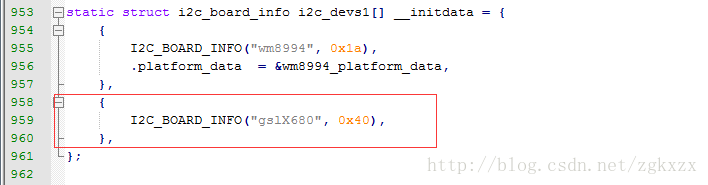
4.因为TP采用的是I2C总线驱动,还要在linux/arch/arm/mach-exynos/mach-smdk4x12.c文件中添加
这里的IIC地址一定要与程序上面一致,并且和设备的吻合
二、程序分析
1.定义地址和参数
#define GSLX680_I2C_NAME "gslX680" //IIC的设备名
#define GSLX680_I2C_ADDR 0x40 //IIC 设备的地址
#define IRQ_PORT IRQ_EINT(7) //TP的中断引脚
#define GSL_DATA_REG 0x80 //IIC 设备具体功能寄存器的地址 这个是数据寄存器
#define GSL_STATUS_REG 0xe0 //状态寄存器
#define GSL_PAGE_REG 0xf0
#define PRESS_MAX 255 //手指按下的最大值
#define MAX_FINGERS 10 //支持的最大手指数
#define MAX_CONTACTS 10 //支持的最大关联
#define DMA_TRANS_LEN 0x20 //DMA传输的最大长度
- 1
2.设备的驱动初始化函数
首先,在加载驱动后,Linux系统通过module_init(gsl_ts_init);进行设备的初始化
static int __init gsl_ts_init(void)
{
int ret;
if(strcasecmp(tp_name, "gslx680") == 0)
{
printk("Initial gslx680 Touch Driver\n");
}
else
{
return 0;
}
print_info("==gsl_ts_init==\n");
ret = i2c_add_driver(&gsl_ts_driver);
print_info("ret=%d\n",ret);
return ret;
}
- 1
主要是通过i2c_add_driver(&gsl_ts_driver)将
static struct i2c_driver gsl_ts_driver = {
.driver = {
.name = GSLX680_I2C_NAME,
.owner = THIS_MODULE,
},
#ifndef CONFIG_HAS_EARLYSUSPEND
.suspend = gsl_ts_suspend,
.resume = gsl_ts_resume,
#endif
.probe = gsl_ts_probe,
.remove = __devexit_p(gsl_ts_remove),
.id_table = gsl_ts_id,
};
- 1
挂载到IIC总线
3.设备的探针函数
设备的探测函数,退出函数、设备的ID等等都注册上去。
在设备工作时,首先是探测函数
static int __devinit gsl_ts_probe(struct i2c_client *client,
const struct i2c_device_id *id)
{
struct gsl_ts *ts;
int rc;
print_info("GSLX680 Enter %s\n", __func__);
if (!i2c_check_functionality(client->adapter, I2C_FUNC_I2C)) {
dev_err(&client->dev, "I2C functionality not supported\n");
return -ENODEV;
}
ts = kzalloc(sizeof(*ts), GFP_KERNEL);
if (!ts)
return -ENOMEM;
print_info("==kzalloc success=\n");
ts->client = client;
i2c_set_clientdata(client, ts);
ts->device_id = id->driver_data;
rc = gslX680_ts_init(client, ts); //初始化gls1680
if (rc < 0) {
dev_err(&client->dev, "GSLX680 init failed\n");
goto error_mutex_destroy;
}
gsl_client = client;
gslX680_init();
/初始化gls1680相关的IO端口
init_chip(ts->client);
check_mem_data(ts->client);
rc= request_irq(client->irq, gsl_ts_irq, IRQF_TRIGGER_RISING, client->name, ts); //中断请求 ,注册终端,上升沿触发 gsl_ts_irq 回调函数
if (rc < 0) {
print_info( "gsl_probe: request irq failed\n");
goto error_req_irq_fail;
}
/* create debug attribute */
//rc = device_create_file(&ts->input->dev, &dev_attr_debug_enable);
#ifdef CONFIG_HAS_EARLYSUSPEND
ts->early_suspend.level = EARLY_SUSPEND_LEVEL_BLANK_SCREEN + 1;
//ts->early_suspend.level = EARLY_SUSPEND_LEVEL_DISABLE_FB + 1;
ts->early_suspend.suspend = gsl_ts_early_suspend;
ts->early_suspend.resume = gsl_ts_late_resume;
register_early_suspend(&ts->early_suspend);
#endif
#ifdef GSL_MONITOR
print_info( "gsl_ts_probe () : queue gsl_monitor_workqueue\n");
INIT_DELAYED_WORK(&gsl_monitor_work, gsl_monitor_worker);
gsl_monitor_workqueue = create_singlethread_workqueue("gsl_monitor_workqueue");
queue_delayed_work(gsl_monitor_workqueue, &gsl_monitor_work, 1000);
#endif
print_info("[GSLX680] End %s\n", __func__);
return 0;
//exit_set_irq_mode:
error_req_irq_fail:
free_irq(ts->irq, ts);
error_mutex_destroy:
input_free_device(ts->input);
kfree(ts);
return rc;
}
- 1
4.设备初始化
static int gslX680_ts_init(struct i2c_client *client, struct gsl_ts *ts)
{
struct input_dev *input_device;
int i, rc = 0;
printk("[GSLX680] Enter %s\n", __func__);
ts->dd = &devices[ts->device_id];
if (ts->device_id == 0) {
ts->dd->data_size = MAX_FINGERS * ts->dd->touch_bytes + ts->dd->touch_meta_data;
ts->dd->touch_index = 0;
}
printk("ts->dd->data_size is %d\n", ts->dd->data_size);
ts->touch_data = kzalloc(ts->dd->data_size, GFP_KERNEL);
if (!ts->touch_data) {
pr_err("%s: Unable to allocate memory\n", __func__);
return -ENOMEM;
}
input_device = input_allocate_device(); //申请输入子系统设备
if (!input_device) {
rc = -ENOMEM;
goto error_alloc_dev;
}
ts->input = input_device;
input_device->name = GSLX680_I2C_NAME;
input_device->id.bustype = BUS_I2C;
input_device->dev.parent = &client->dev;
input_set_drvdata(input_device, ts);
/*set_bit()告诉input输入子系统支持哪些事件,哪些按键
*/
set_bit(ABS_MT_POSITION_X, input_device->absbit);//设置接触面的中心点X坐标
set_bit(ABS_MT_POSITION_Y, input_device->absbit);//设置接触面的中心点Y坐标
set_bit(ABS_MT_TOUCH_MAJOR, input_device->absbit);//设置触摸方向
set_bit(ABS_MT_WIDTH_MAJOR, input_device->absbit);//设置手指触摸接触面积大小
set_bit(ABS_PRESSURE, input_device->absbit);//设置压力
set_bit(BTN_TOUCH, input_device->keybit);//按键触摸
set_bit(EV_ABS, input_device->evbit);//绝对位移
set_bit(EV_KEY, input_device->evbit);//按键类型
set_bit(EV_SYN,input_device->evbit);//同步
__set_bit(INPUT_PROP_DIRECT, input_device->propbit);
input_mt_init_slots(input_device, (MAX_CONTACTS + 1));
//设置子系统的参数上报
input_set_abs_params(input_device,ABS_MT_POSITION_X, 0, SCREEN_MAX_X, 0, 0);
input_set_abs_params(input_device,ABS_MT_POSITION_Y, 0, SCREEN_MAX_Y, 0, 0);
input_set_abs_params(input_device,ABS_MT_TOUCH_MAJOR, 0, PRESS_MAX, 0, 0);
input_set_abs_params(input_device,ABS_MT_WIDTH_MAJOR, 0, 200, 0, 0);
input_set_abs_params(input_device, ABS_MT_TRACKING_ID, 0, 5, 0, 0);
input_set_abs_params(input_device,ABS_PRESSURE, 0, PRESS_MAX, 0 , 0);
input_set_abs_params(input_device, ABS_MT_PRESSURE, 0, PRESS_MAX, 0, 0);
#ifdef HAVE_TOUCH_KEY
input_device->evbit[0] = BIT_MASK(EV_KEY);
//input_device->evbit[0] = BIT_MASK(EV_SYN) | BIT_MASK(EV_KEY) | BIT_MASK(EV_ABS);
for (i = 0; i < MAX_KEY_NUM; i++)
set_bit(key_array[i], input_device->keybit);
#endif
//中断设置
client->irq = IRQ_PORT;
ts->irq = client->irq;
//创建单线程的工作队列
ts->wq = create_singlethread_workqueue("kworkqueue_ts");
if (!ts->wq) {
dev_err(&client->dev, "Could not create workqueue\n");
goto error_wq_create;
}
//工作队列的挂起
flush_workqueue(ts->wq);
//初始化工作队列,对应的处理函数为gslX680_ts_worker
INIT_WORK(&ts->work, gslX680_ts_worker);
//注册输入设备子系统
rc = input_register_device(input_device);
if (rc)
goto error_unreg_device;
return 0;
error_unreg_device:
destroy_workqueue(ts->wq);
error_wq_create:
input_free_device(input_device);
error_alloc_dev:
kfree(ts->touch_data);
return rc;
}
- 1
5.IO的初始化
static int gslX680_init(void)
{
/* shutdown pin */
gpio_request_one(EXYNOS4_GPX0(6), GPIOF_OUT_INIT_HIGH, "GPX0");
s3c_gpio_setpull(EXYNOS4_GPX0(6),S3C_GPIO_PULL_UP);
s3c_gpio_cfgpin(EXYNOS4_GPX0(6), S3C_GPIO_OUTPUT);
gpio_set_value(EXYNOS4_GPX0(6), 1);
mdelay(50);
gpio_set_value(EXYNOS4_GPX0(6), 0);
/* config interrupt pin */
s5p_register_gpio_interrupt(EXYNOS4_GPX0(7));//
s3c_gpio_cfgpin(EXYNOS4_GPX0(7), S3C_GPIO_SFN(0xf));//引脚配置,输入
s3c_gpio_setpull(EXYNOS4_GPX0(7), S3C_GPIO_PULL_UP);//上拉
irq_set_irq_type(EXYNOS4_GPX0(7), IRQ_TYPE_EDGE_RISING);//上升沿触发终端
return 0;
}
- 1
6.触摸屏终端回调函数
看看中断回调函数,中断回调函数相当于中断的上半部,主要是做一些简单工作,复制事情交给中断下半部实现,也就是开启的工作队列线程。
static irqreturn_t gsl_ts_irq(int irq, void *dev_id)
{
struct gsl_ts *ts = dev_id;
print_info("========gslX680 Interrupt=========\n");
disable_irq_nosync(ts->irq);//关闭中断
if (!work_pending(&ts->work)) {
queue_work(ts->wq, &ts->work);//将工作线程再次加入工作队列
}
return IRQ_HANDLED;
}
- 1
这里我们看看中断下半部核心处理部分,包括数据采集与上报子系统等等
static void gslX680_ts_worker(struct work_struct *work)
{
int rc, i,j;
u8 id, touches, read_buf[4] = {0};
u16 x, y;
struct gsl_ts *ts = container_of(work, struct gsl_ts,work);
print_info("=====gslX680_ts_worker=====\n");
#ifdef GSL_MONITOR
if(i2c_lock_flag != 0)
goto i2c_lock_schedule;
else
i2c_lock_flag = 1;
#endif
#ifdef GSL_NOID_VERSION
u32 tmp1;
u8 buf[4] = {0};
struct gsl_touch_info cinfo = {0};
#endif
rc = gsl_ts_read(ts->client, 0x80, ts->touch_data, ts->dd->data_size);//读取触摸屏的信息
if (rc < 0) {
dev_err(&ts->client->dev, "read failed\n");
goto schedule;
}
touches = ts->touch_data[ts->dd->touch_index];//触点数
print_info("-----touches: %d -----\n", touches);
#ifdef GSL_NOID_VERSION
cinfo.finger_num = touches;
print_info("tp-gsl finger_num = %d\n",cinfo.finger_num);
for(i = 0; i < (touches < MAX_CONTACTS ? touches : MAX_CONTACTS); i ++) {
cinfo.x[i] = join_bytes( ( ts->touch_data[ts->dd->x_index + 4 * i + 1] & 0xf),
ts->touch_data[ts->dd->x_index + 4 * i]);
cinfo.y[i] = join_bytes(ts->touch_data[ts->dd->y_index + 4 * i + 1],
ts->touch_data[ts->dd->y_index + 4 * i ]);
cinfo.id[i] = ((ts->touch_data[ts->dd->x_index + 4 * i + 1] & 0xf0)>>4);
print_info("tp-gsl before: x[%d] = %d, y[%d] = %d, id[%d] = %d \n",i,cinfo.x[i],i,cinfo.y[i],i,cinfo.id[i]);
}
cinfo.finger_num=(ts->touch_data[3]<<24)|(ts->touch_data[2]<<16)
|(ts->touch_data[1]<<8)|(ts->touch_data[0]);
gsl_alg_id_main(&cinfo);
tmp1=gsl_mask_tiaoping();
print_info("[tp-gsl] tmp1=%x\n",tmp1);
if(tmp1>0&&tmp1<0xffffffff) {
buf[0]=0xa;
buf[1]=0;
buf[2]=0;
buf[3]=0;
gsl_ts_write(ts->client,0xf0,buf,4);
buf[0]=(u8)(tmp1 & 0xff);
buf[1]=(u8)((tmp1>>8) & 0xff);
buf[2]=(u8)((tmp1>>16) & 0xff);
buf[3]=(u8)((tmp1>>24) & 0xff);
print_info("tmp1=%08x,buf[0]=%02x,buf[1]=%02x,buf[2]=%02x,buf[3]=%02x\n",
tmp1,buf[0],buf[1],buf[2],buf[3]);
gsl_ts_write(ts->client,0x8,buf,4);
}
touches = cinfo.finger_num;
#endif
for(i = 1; i <= MAX_CONTACTS; i ++) {
if(touches == 0)
id_sign[i] = 0;
id_state_flag[i] = 0;
}
for(i= 0; i < (touches > MAX_FINGERS ? MAX_FINGERS : touches); i ++) {
#ifdef GSL_NOID_VERSION
id = cinfo.id[i];
x = cinfo.x[i];
y = cinfo.y[i];
#else
x = join_bytes( ( ts->touch_data[ts->dd->x_index + 4 * i + 1] & 0xf),
ts->touch_data[ts->dd->x_index + 4 * i]);
y = join_bytes(ts->touch_data[ts->dd->y_index + 4 * i + 1],
ts->touch_data[ts->dd->y_index + 4 * i ]);
//id = ts->touch_data[ts->dd->id_index + 4 * i] >> 4;
id = ts->touch_data[ts->dd->id_index + 4 * i] >> 4;
#endif
print_info("-->x = %d, y = %d,id = %d, max = %d,ts->dd->x_index = %d\n",x,y,id,MAX_CONTACTS,ts->dd->id_index);
//id = touches;
if(1 <=id && id <= MAX_CONTACTS) {
#ifdef FILTER_POINT
filter_point(x, y ,id);//滤波
#else
record_point(x, y , id);//记录处理
#endif
print_info("-->x_new = %d, y_new = %d\n",x_new,y_new);
report_data(ts, x_new, y_new, 10, id); //上报数据
id_state_flag[id] = 1;
}
}
for(i = 1; i <= MAX_CONTACTS; i ++) {
if( (0 == touches) || ((0 != id_state_old_flag[i]) && (0 == id_state_flag[i])) ) {
#ifdef REPORT_DATA_ANDROID_4_0
input_mt_slot(ts->input, i);
input_report_abs(ts->input, ABS_MT_TRACKING_ID, -1);
input_mt_report_slot_state(ts->input, MT_TOOL_FINGER, false);
#endif
id_sign[i]=0;
}
id_state_old_flag[i] = id_state_flag[i];
}
if(0 == touches) {
#ifndef REPORT_DATA_ANDROID_4_0
input_mt_sync(ts->input);
#endif
#ifdef HAVE_TOUCH_KEY
if(key_state_flag) {
input_report_key(ts->input, key, 0);
input_sync(ts->input);
key_state_flag = 0;
}
#endif
}
input_sync(ts->input);//同步更新
schedule:
#ifdef GSL_MONITOR
i2c_lock_flag = 0;
i2c_lock_schedule:
#endif
enable_irq(ts->irq);//再次开启中断
}
- 1
7. 上报输入子系统
static void report_data(struct gsl_ts *ts, u16 x, u16 y, u8 pressure, u8 id)
{
swap(x, y);
// print_info("#####id=%d,x=%d,y=%d######\n",id,x,y);
print_info("#####id=%d,x=%d,y=%d######\n",id,x,y);
if(x > SCREEN_MAX_X || y > SCREEN_MAX_Y) {
#ifdef HAVE_TOUCH_KEY
report_key(ts,x,y);
#endif
return;
}
input_mt_slot(ts->input, id);
input_report_abs(ts->input, ABS_MT_TRACKING_ID, id);
input_report_abs(ts->input, ABS_MT_POSITION_X, x);
input_report_abs(ts->input, ABS_MT_POSITION_Y, y);
input_report_abs(ts->input, ABS_MT_PRESSURE, pressure);
input_report_key(ts->input, BTN_TOUCH, 1);
}
- 1
至此,glax680电容触摸屏的驱动移植与分析完毕,希望能给大家带来一点点的帮助…
参考资料下载地址:
http://download.csdn.net/detail/zgkxzx/9763694