1、在RobotStudio创建ABB机器人时需要选择841-1 EtherNet/IP Scanner/Adapter功能

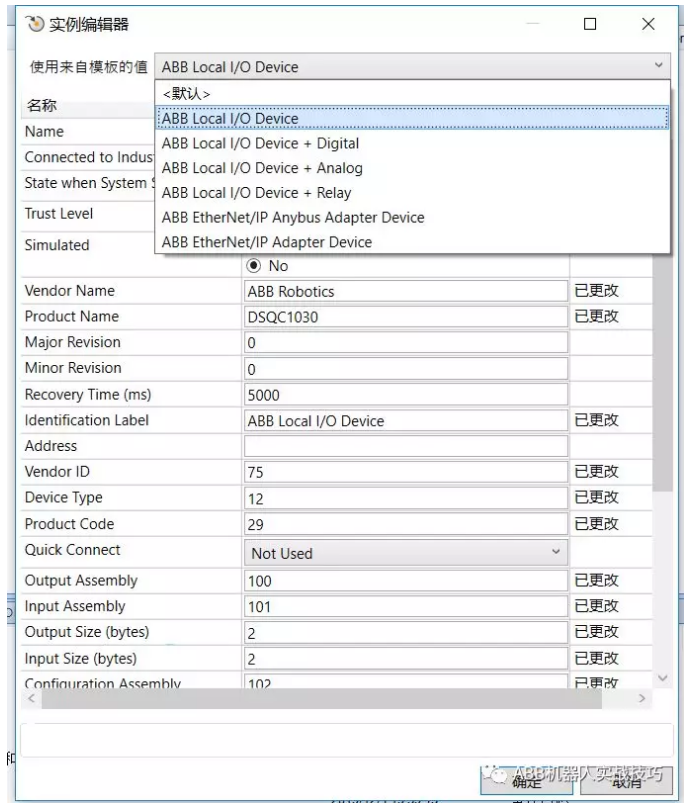
2、来到创建IO设备界面,这里我们来进行1030+1031+1032+1033四个混搭模块的配置,如下图所示,由于配置模板中并不能找到相关的配置模板,因此在这里我们先任选一个模板参数。
3、我们先来定义改模块的名称以及添加相应地址
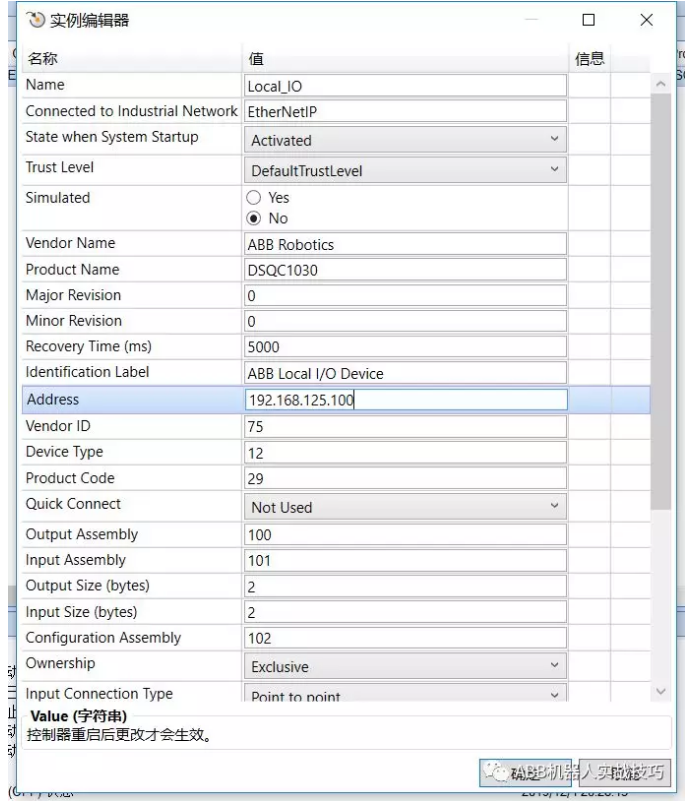
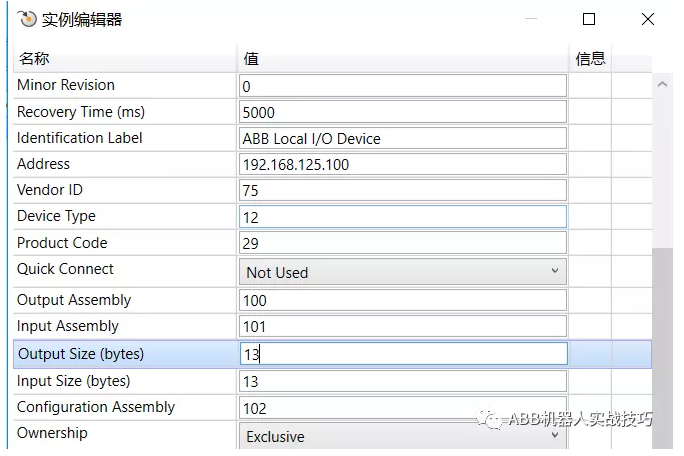
4、将参数”Output Size (bytes)”以及”Input Size (bytes)”分别修改成“13”
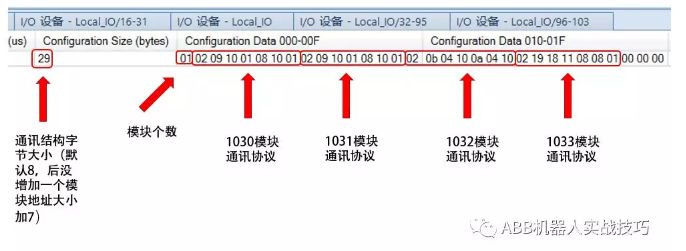
5、并找到参数”Configuration Size (bytes)”并将其改成“29”,并在参数”Configuration Data 000-00F”以及”Configuration Data 010-01F”中依次添加以下参数:“02 09 10 01 08 10 01”、“02 0b 04 10 0a 04 10”、“02 09 08 01 08 08 01”如下图所示:
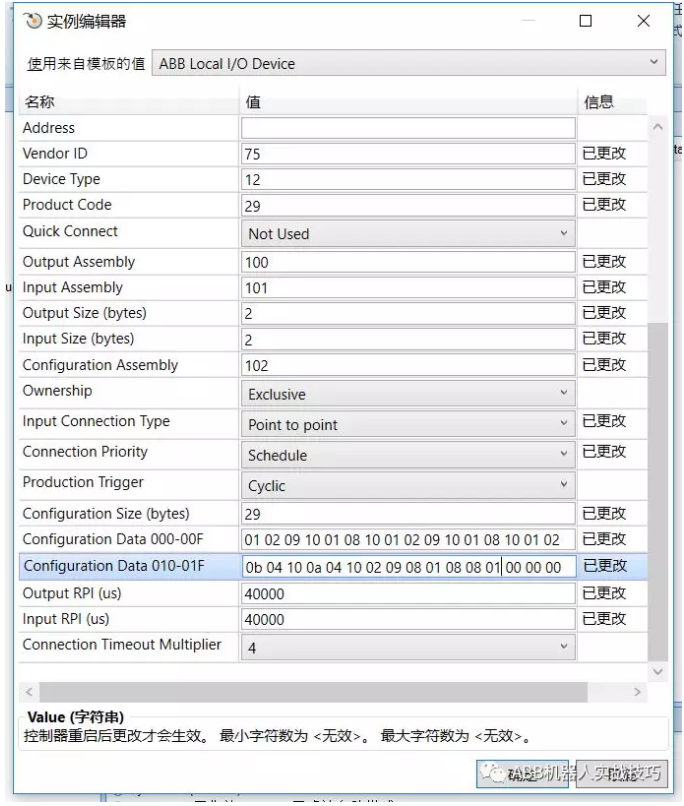
6、确定重启后,我们可以看到该模块已经配置成功啦

7、原理解析:
问1:为啥Output Size (bytes)”以及”Input Size(bytes)”要设置成“13”?
答1:模块1030、1031、1032、1033输入输出的字节大小分别为“2、2、8、1”,因此该配置字节大小分别为“2+2+8+1=13”
问2:参数”Configuration Size (bytes)”以及”Configuration Data”这些参数分别对应着什么,有点看不懂
答2:参数”Configuration Size (bytes)”指的是通讯架构的字节大小,而参数”Configuration Data”中这些值是与之相对应的。