英雄联盟七星图建立模型二
上一篇文章记录了一些最简单直接的方法来建立模型,本篇就来讲一下如何动态建立此模型,以后无论几边形我们都可以以此来解决,废话不多说直接开打!
一、单位圆上的点的坐标
- 建立直角坐标系;
- 以坐标系原点为圆心,作单位圆,r;
-
在第一象限取点A;
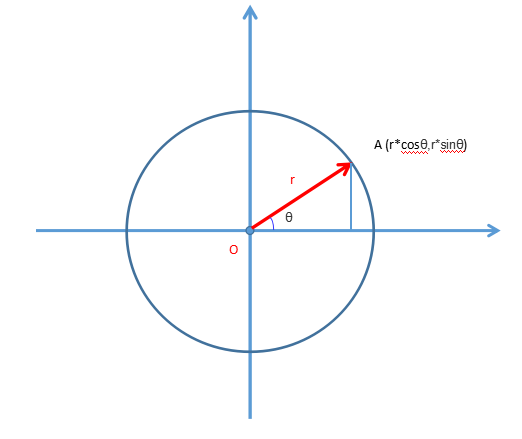
由此可以得出A的坐标为: ( r
cosθ , r
sinθ )
二、平移变换
哈哈,搞定好像是初中或高中的某个知识点
- 在上面的基础上将圆沿着X轴方向移动Δx+r的距离;
- 将圆沿着Y轴的方向移动Δy+r的距离,得到如下图:
- 其中绿色的直角坐标系为原来的坐标系;
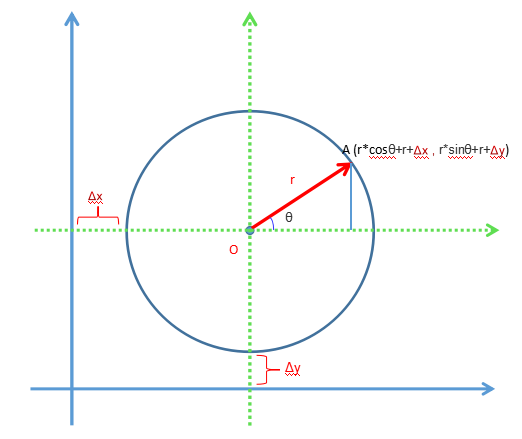
由此可以得出A的坐标为: ( r • cosθ + r + Δx , r • sinθ + r + Δy )
三、绘制内接正七边形
终于到了激动人心的时刻了,绘制圆的内接正七边形

- 由于android view坐标的Y轴正方向是朝下的,所以我们在此讲正七边形倒置绘制,这样我们才能和android 坐标系对应起来;
- 一般情况下我们在绘制多形图时,都是取一个点作为定点,如图中的C,以平行Y轴且过C点的直线作为多形图的轴线对称绘制,如图所示;
- 有多边形的特性可得出: β = 2π / 7 , α = β – π/2 = – π/2 + β
- 由于我们取C点特殊,所以得出:C (r + Δx , Δy)即 : [ r + Δx + r • cos( – π / 2 ),r +Δy + r • sin( – π / 2 ) ]
-
B点相当于点C绕点O逆时针旋转 β 角 ,也就是 α = – π/2 + β
即 :B [ r + Δx + r • cos( – π/2 + β ) , r + Δy + r • sin( – π/2 + β ) ]
即 :B [ r + Δx + r • cos( – π/2 + 1 • β ) , r + Δy + r • sin( – π/2 + 1 • β ) ] -
所以正七边形的七个坐标分别为(从C点开始):
角 1 : [ r + Δx + r • cos( – π/2 + 0 • β ) , r + Δy + r • sin( – π/2 + 0 • β ) ]
角 2 : [ r + Δx + r • cos( – π/2 + 1 • β ) , r + Δy + r • sin( – π/2 + 1 • β ) ]
角 3 : [ r + Δx + r • cos( – π/2 + 2 • β ) , r + Δy + r • sin( – π/2 + 2 • β ) ]
角 4 : [ r + Δx + r • cos( – π/2 + 3 • β ) , r + Δy + r • sin( – π/2 + 3 • β ) ]
角 5 : [ r + Δx + r • cos( – π/2 + 4 • β ) , r + Δy + r • sin( – π/2 + 4 • β ) ]
角 6 : [ r + Δx + r • cos( – π/2 + 5 • β ) , r + Δy + r • sin( – π/2 + 5 • β ) ]
角 7 : [ r + Δx + r • cos( – π/2 + 6 • β ) , r + Δy + r • sin( – π/2 + 6 • β ) ]
四、获取正N边形每个点的坐标
由上可知我们可以得出正N边形的个点坐标:
令正n边形的边数为n 则 β = 2π / n
所以正n边形各个定点坐标为:
角 1 : [ r + Δx + r • cos( – π/2 + 0 • β ) , r + Δy + r • sin( – π/2 + 0 • β ) ]
角 2 : [ r + Δx + r • cos( – π/2 + 1 • β ) , r + Δy + r • sin( – π/2 + 1 • β ) ]
角 3 : [ r + Δx + r • cos( – π/2 + 2 • β ) , r + Δy + r • sin( – π/2 + 2 • β ) ]
角 4 : [ r + Δx + r • cos( – π/2 + 3 • β ) , r + Δy + r • sin( – π/2 + 3 • β ) ]
角 5 : [ r + Δx + r • cos( – π/2 + 4 • β ) , r + Δy + r • sin( – π/2 + 4 • β ) ]
• • • • • • •
• • • • • • •
• • • • • • •
角 n – 1 : { r + Δx + r • cos[ – π/2 + ( n – 2 ) • β ] , r + Δy + r • sin[ – π/2 + ( n – 2 ) • β ] }
角 n : { r + Δx + r • cos[ – π/2 + ( n – 1 ) • β ] , r + Δy + r • sin[ – π/2 + ( n – 1 ) • β ] }
五、绘制View
两种计算七星图定点的坐标方法就算是讲完了,这样就可以开始我们的编码模块了,接下来我们将会使用这种动态的方式来计算绘制我们的七边形,在下一篇文章中我们将会进行编码模块,谢谢大家!