ubuntu16.04如何安装ROS,并解决重启后出现的the system is running in low-graphics mode 的解决方法
在目前的人工智能机器学习或者是嵌入式开发与应用的过程中,学生党大多数都会用到基于linux安装ROS进行开发,那么我们如何进行ROS的安装呢,并解决后续的一些相关问题,这是林君学长本次博客给大家带来的内容,话不多说,一起来看吧!
一、ubuntu16.04安装ROS
在进行Ros的安装之前,我们需要在电脑上面安装ubuntu16.04版本的,这里林君之前写过博客如何在Windows上面安装ubuntu16.04,所以,大家可以去看一下,下面给出链接哦!
windows上面ubuntu16.04版本的安装方法
在ubuntu16.04安装完成之后,我们正式进入ROS的安装
1、安装ROS需要进行国内源,这样下载才能更快,所以,我们第一步需要进行的是进行中科大源更改!
下面给出我们需要换的
中科大源
:
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-security main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-updates main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-proposed main restricted universe multiverse
deb-src http://mirrors.ustc.edu.cn/ubuntu/ xenial-backports main restricted universe multiverse
deb http://ros.exbot.net/rospackage/ros/ubuntu/ xenial main#这是易科源因为我开始安装ros时使用的是国外公钥源,中间出现了因为国外源不稳定出现了问题,后来添加易科源后才解决
方式一
、利用终端命令行的方式进行换源
打开ubuntu16.04的终端,输入如下命令然后输入自己ubuntu的密码,进入换源文件夹
sudo gedit /etc/apt/sources.list
将里面的内容注释掉或者是替换为上诉给出的中科源,如下:
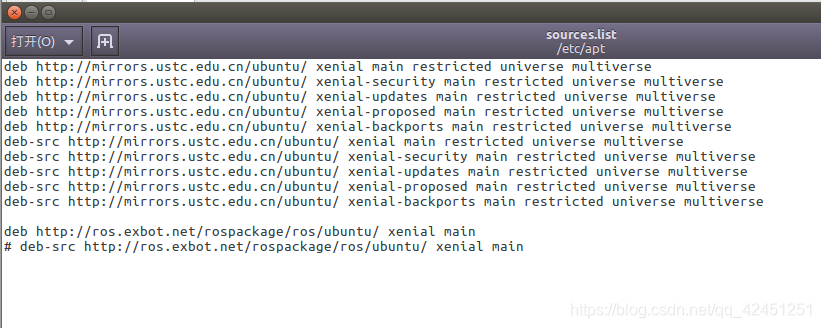
点击保存后关闭即可
方式二
、打开ubuntu的
系统设置,打开软件和更新
,然后选择
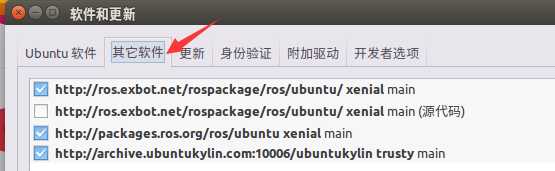
其他软件
点击添加,在
APT行输入我们需要的中科大源和易科源
,点击添加就ok,这种就是图形化界面的操作,比较笨拙,而且只能一条一条的进行添加,不建议使用,但林君学长给大家整理出来,有这个方式!

2、设置Ubuntu的sources.list
打开终端,输入如下命令:
sudo sh -c 'echo "deb http://packages.ros.org/ros/ubuntu $(lsb_release -sc) main" > /etc/apt/sources.list.d/ros-latest.list'
3、添加key,这就是安装ros需要的密匙,这里是免费的哈
在刚才的操作下,接着输入如下命令:
sudo apt-key adv --keyserver hkp://ha.pool.sks-keyservers.net:80 --recv-key 0xB01FA116
如果无法连接上述服务器,可以尝试用
hkp://pgp.mit.edu:80或者hkp://keyserver.ubuntu.com:80替换上面命令的hkp://ha.pool.sks-keyservers.net:80
4、更新package,换源之后需要更新
1)、在终端一次输入下面两个命令:
sudo apt-get update
2)、等待上面命令执行完毕后,在输入如下命令:
sudo apt-get upgrade
注意:该步执行的时间可能需要一点时间,大概五分钟左右,所以,可以去做一点其他的事情!
建议在安装所有软件前都要执行这两个命令,以便及时更新过期的软件
5、安装aptitude,这是一个比较强的下载器,可以分析出安装程序时能分析出各种依赖问题,建议使用这个,当然也可以不用下载,直接用apt-get
sudo apt-get install aptitude
6、安装ROS kinetic完整版
本步骤花费的时间是最长久的,可能需要几十分钟甚至更高,属于正常现象,取决于大家的网速,等待吧,不要关闭哦,中途可以换网,因为后面这个会接着下载的不用怕!
sudo aptitude install ros-kinetic-desktop-full
7、初始化rosdep
在使用ros之前一定要进行初始化,在终端依次输入如下命令进行初始化:
sudo rosdep init
rosdep update
8、配置环境
终端依次输入如下两个命令:
echo "source /opt/ros/kinetic/setup.bash" >> ~/.bashrc
source ~/.bashrc
9、安装building package的依赖
终端输入该命令:
sudo apt-get install python-rosinstall python-rosinstall-generator python-wstool build-essential
10、测试ROS安装成功
1)、终端输入命令打开ROS
roscore
2)、等待程序不动后,再打开一个窗口(注意,前面的终端窗口不能关闭),输入一下命令:
rosrun turtlesim turtlesim_node
该命令执行成功后会弹出一个乌龟窗口,如下所示:
3)、出现一只小乌龟,再打开一个窗口(前面的终端窗口还是不要关闭哦),输入以下命令:
rosrun turtlesim turtle_teleop_key
此时,就可以在终端窗口,通过方向键控制小乌龟的移动了哦!
注意,鼠标一定要停在最后一个终端窗口之中,然后控制键盘的方向键才能够移动哦!

通过以上步骤,我们的ROS就安装完毕了哈!
二、安装ROS重启之后出现the system is running in low-graphics mode 的解决方法
很多时候,在ubuntu16.04安装ROS之后,我们重启ubuntu系统,会出现不能进入图形界面的问题,出现the system is running in low-graphics mode,虽然林君学长也不知道是什么问题,但是不要慌,学长带大家解决啦!
1、先按ctrl+alt+F1进入调试界面
首先会要我们输入自己的用户名和密码,大家应该知道自己的用户名和密码吧!
用户名就是@前面的部分

密码就是ubuntu的密码
注意:
很多小伙伴电脑F1有特定的功能,比如学长的联想电脑,F1有他本身的功能,这时候我们需要按键ctrl+alt+Fn+F1进入调试界面
然后一次输入一下命令:
cd /etc/X11
sudo cp xorg.conf.failsafe xorg.conf
sudo reboot
这样重启之后,可以进入图像界面,但是很卡,而且我们自己不能设置分辨率,所以,还需要接下来的步骤!
2、首先我们去官网下载nvidia显卡驱动(在ubuntu系统上面哦)
网址:
http://www.geforce.cn/drivers
这里下载得很快的,注意在
搜索栏选择linux版本的哦,不要下载错误成windows了哈!
比如学长下载的就是如下图的驱动:
3、再次Ctrl + Alt + F1或者ctrl+alt+Fn+F1到控制台输入如下命令:
sudo service lightdm stop
4、安装驱动程序
依次输入以下命令:
sudo chmod a+x NVIDIA-Linux-x86_64-xxx.run
NVIDIA-Linux-x86_64-xxx.run为我们下载驱动的文件名,xxx对应自己的版本号哦!
sudo ./NVIDIA-Linux-x86_64-xxx.run -no-x-check -no-nouveau-check -no-opengl-files
5、删除xorg.conf文件
在终端依次输入以下命令删除xorg.conf文件:
cd /etc/X11
sudo rm -rf xorg.conf
然后重启(sudo reboot)一切就好了!
后面进入系统可能会和之前我们安装的ubuntu16.04的界面效果不一样,这是驱动的问题,我们不管他哈,比如学长的变成如下这样了:

好啦,本次博客的主要内容就是这些啦,有不懂的欢迎学弟学妹们评论区留言哦!点赞、评论、关注林君学长吧!林君学长的又一天编程岁月!