一、基础配置
1、配置RCC、SYS,SYS的Timebase Source选择TIM6
2、配置USART1、时钟84MHz
3、激活FreeRTOS,选择CMSIS_V1,Config parameters种USE_TIMERS选择ENABLE
二、编码器及电机驱动引脚配置
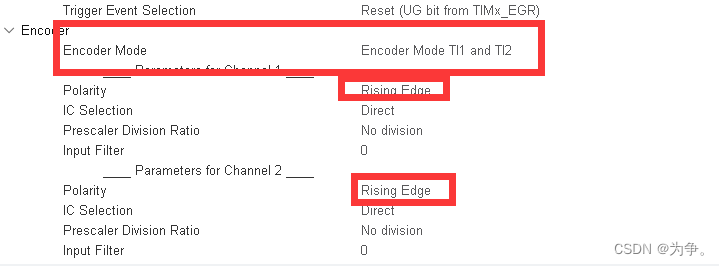
1、选用TIM3的编码器模式


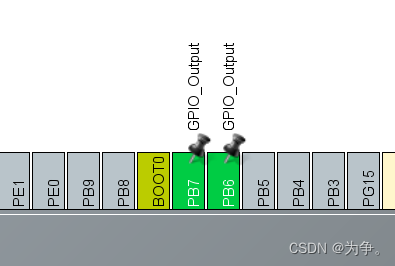
2、驱动使用L298N,将PB6、PB7设置为输出模式
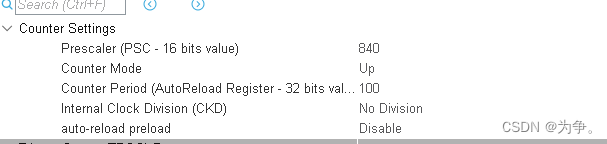
3、使用TIM2的CH1输出1kHz的PWM
三、FreeRTOS配置
1、设置两个软件定时器,一个用于总控制,一个用于编码器读取数值,也可以用硬件定时器

2、设置一个队列,用于编码器数值传输

四、代码编写
硬件测试及传感器数据读取
在gpio.c中添加以下代码,完成电机限幅与方向控制
void Motor_Limit(int *speed)
{
if(*speed>=100)
*speed=100;
if(*speed<=-100)
*speed=-100;
}
uint8_t motor_dir;
void Motor_control(int speed)
{
if(speed>=0)
{
motor_dir=1;
Motor_Limit(&speed);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,speed);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_SET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_RESET);
}
else
{
motor_dir=0;
Motor_Limit(&speed);
__HAL_TIM_SetCompare(&htim2,TIM_CHANNEL_1,-speed);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_6,GPIO_PIN_RESET);
HAL_GPIO_WritePin(GPIOB,GPIO_PIN_7,GPIO_PIN_SET);
}
}在main.c中初始化TIM2,发出PWM波形
HAL_TIM_PWM_Start(&htim2,TIM_CHANNEL_1);添加以下函数测试电机是否旋转,若电机旋转证明无错误,完成编码器测试后删掉
Motor_control(80);添加编码器初始化代码
HAL_TIM_Encoder_Start(&htim3,TIM_CHANNEL_ALL);在main中测试编码器是否正常,若正常将函数删掉。
enc=__HAL_TIM_GET_COUNTER(&htim3);在freertos.c中的StartDefaultTask函数中添加代码,启动软件定时器,总控制周期设置10ms,编码器读取设置10ms
osTimerStart(timer_controlHandle,10);
osTimerStart(timer_encoderHandle,10);编写编码器速度读取函数,debug后将enc放入函数内部
int32_t enc;
/* encoder_Callback function */
void encoder_Callback(void const * argument)
{
/* USER CODE BEGIN encoder_Callback */
enc=__HAL_TIM_GET_COUNTER(&htim3);
__HAL_TIM_SET_COUNTER(&htim3,0);
/* USER CODE END encoder_Callback */
}此时发现反方向旋转时读出来的数据非常的大,且不是复数,此时更改代码,手动补偿
int32_t enc;
extern uint8_t motor_dir;
/* encoder_Callback function */
void encoder_Callback(void const * argument)
{
/* USER CODE BEGIN encoder_Callback */
if(motor_dir==1)
enc=__HAL_TIM_GET_COUNTER(&htim3);
else
enc=-65535+__HAL_TIM_GET_COUNTER(&htim3);
__HAL_TIM_SET_COUNTER(&htim3,0);
/* USER CODE END encoder_Callback */
}此时完成开环控制
增加pid.c与pid.h文件,完成闭环调参