OpenCV中轮廓提取函数findContours()实现的是这篇论文的算法:
Satoshi Suzuki and others. Topological structural analysis of digitized binary images by border following.
Computer Vision, Graphics, and Image Processing
, 30(1):32–46, 1985.
论文解决的是对于
二值图像
的轮廓提取,本人读了一下论文,整理了一下算法思路,如有错误恳请指正。
基本概念和符号说明
frame(框架)
:一张图片的最上行,最下行,最左列,最右列组成了这张图片的
frame(框架)。
例如一张图片宽为640,高为480,则这张图片的frame为第0行像素,第479行像素,第0列像素,第639列像素组成了这张图片的frame。
灰度值为0和1的像素分别称为
0-pixel(0像素)
和
1-pixel(1像素)
。论文假设
frame是由0像素填充
的。
表示图片中第i行,第j列的像素点。
表示像素点
的灰度值。则一张图片可以表示为
。
由1像素组成的连通域称为
1-component(1连通域)
,由0像素组成的连通域称为
0-component(0连通域)。
如果
0连通域S
包含了
frame,那么S称为background(背景),
否则称为
孔洞。
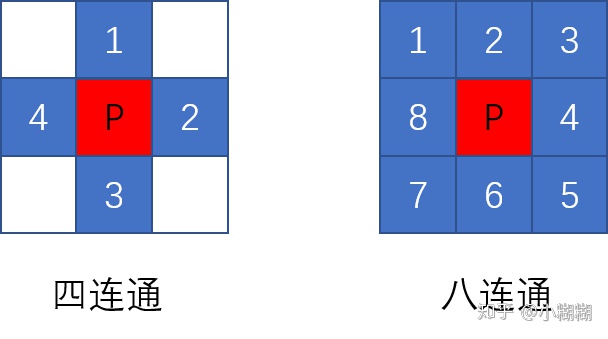
4(8)连通场景:
1像素是4(8)连通,0像素是8(4)连通。
4连通:两个像素p和q,如果q在p的4邻域中,称这两个像素是4连通
8连通:两个像素p和q,如果q在p的8邻域中,称这两个像素是8连通
border point(边界点):
在4(8)连通场景中,如果一个1像素
在它的8(4)连通域中有0像素
存在,那么这个1像素
就是一个
border point。边界由许多个边界点构成。
surroundness among connected components(环绕连通域):
在一幅二值图像中有两个连通域S1和S2,如果S1中任何一个像素点从任何一个方向(4个方向)到达frame的路径上都存在S2的像素点,我们称S2
环绕
S1。如果S2环绕S1且S2和S1之间存在
border point,
那么我们称S2
直接环绕
S1。
outer border and hole border(外边界和孔边界):
假设现有1连通域S1,0连通域S2。如果S2
直接环绕
S1,则S2和S1之间的
边界
称为
外边界;
如果S1
直接环绕
S2,则S2和S1之间的边缘称为
孔边界。注意不管是外边界还是孔边界都是由1像素组成。
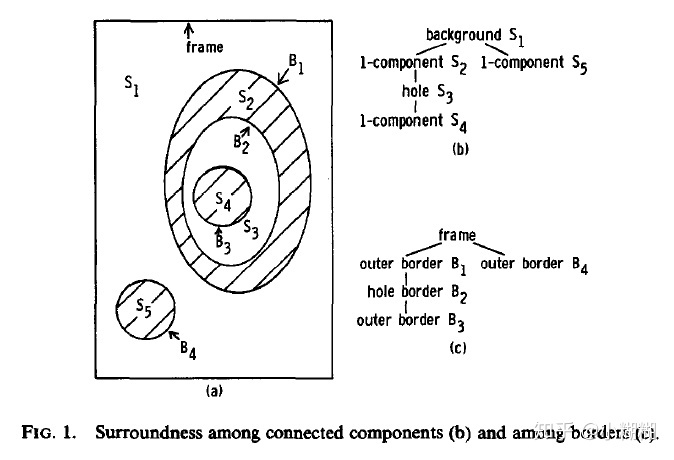
parent border(父边界):
假设现有1连通域S1和S3,0连通域S2,S2直接环绕S1,S3直接环绕S2,S1与S2之间的边界为B1,S2与S3之间的边界为B2,则B2为B1的父边界。如果S2是
background
,那么B1的父边界是
frame。
surroundness among borders(环绕边界):给定两个边界
和
,如果存在一个边界序列
,
,…,
,其中
是
的父边界,那么我们称
环绕
。
通过以上定义,一幅图片中的边界和连通域可以构成拓扑关系。如下图所示:
光栅扫描(RasterScan)
:是指从左往右,由上往下,先扫描完一行,再移至下一行起始位置继续扫描。
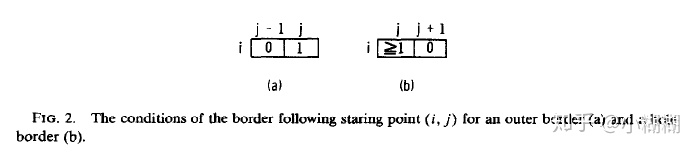
边界开始点(starting point)
:边界开始点分为
外边界开始点
(Fig.2a)和
孔边界开始点
(Fig.2b)。如果点
既满足(a)又满足(b),则把
视为
外边界开始点
。
NBD:
从边界开始点
以边界跟踪算法可以得到一条边界,为每条新找到的边界
B
赋予一个新的唯一的编号,
NBD
表示当前跟踪的边界的编号
。
LNBD:
在光栅扫描的过程中,我们也保存最近遇到(上一个)的边界
B’
的编号,记为
LNBD。
轮廓提取算法
假设输入图像为
,将初始NBD设为1(把F的
frame
看成第一个边界)。使用光栅扫描法扫描图像F,当扫描到某个像素点
的灰度值
时执行下面的步骤。每次当我们扫描到图片的新行的起始位置时,将
LNBD
重置为1。
(1)从下列情况选一种:
(a)如果
并且
,即Fig.2a所描述情况,则
是
外边界开始点,NBD+=1,
。
(b)如果
并且
,即Fig.2b所描述情况,则
是
孔边界开始点,NBD+=1,
。如果
,则
。
(c)其他情况,到第(4)步
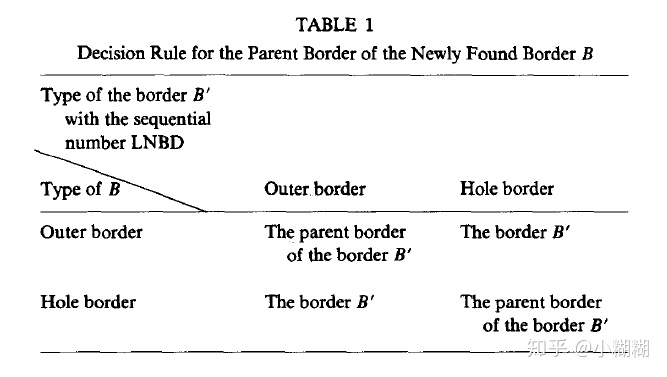
(2)根据上一个边界
B’
和当前新遇到边界
B
的类型,我们可以从表1得到当前边界
B
的父边界。
(3)从
边界开始点
开始按(3.1)到(3.5)进行边界跟踪。
(3.1)以
为中心,
为起始点,按顺时针方向查找
的4(8)邻域是否存在非0像素点。若找到非0像素点,则令
是顺时针方向的第一个非0像素点;否则令
,转到(4)。
(3.2)
,
(3.3)以
为中心,按逆时针方向,
的下一个点为起始点查找
的4(8)邻域是否存在非0像素点,令
是逆时针方向的第一个非0像素点。
(3.4)
(a)如果
是(3.3)中
已经检查过的像素点
且是
0像素点
,则
。
(b)如果
不是(3.3)中
已经检查过的0像素点,并且
,则
。
(c)其他情况,不改变
。
(3.5)如果
且
(回到了边界开始点),则转到(4);否则令
,
,转到(3.3)
(4)如果
,则
,从点
继续光栅扫描。当扫描到图片的右下角顶点时结束。
实例详解
例子来源于原论文,如下图Fig.3所示:
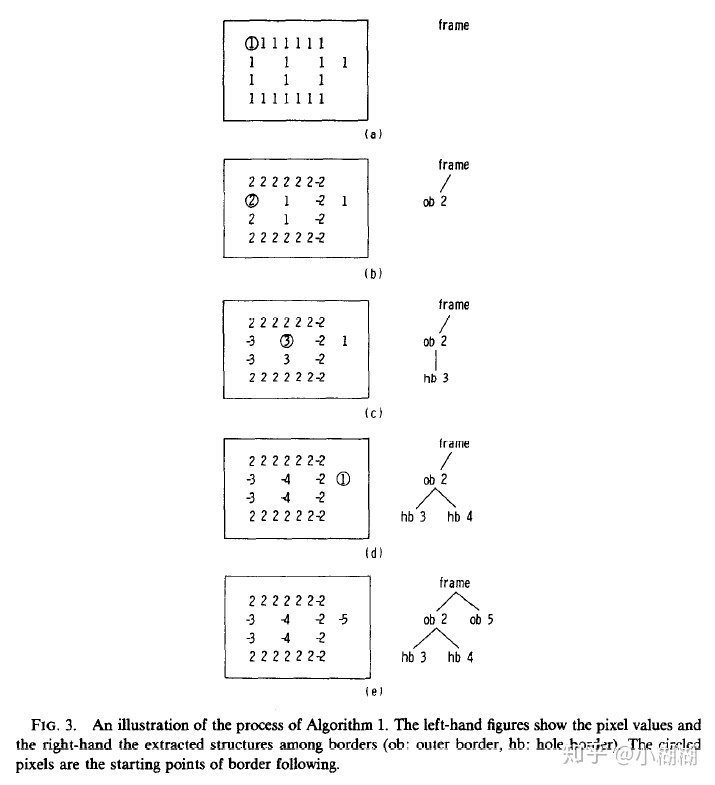
光栅扫描遇到的第一个非0像素点是FiG.3(a)中画圆圈的1,如下图中红色的1。
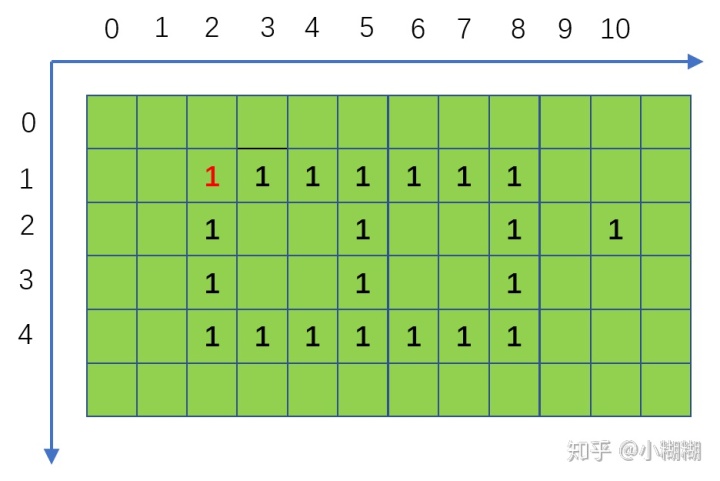
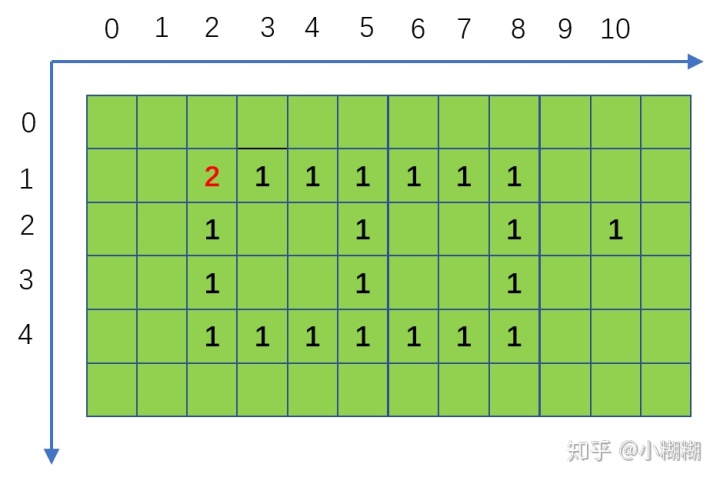
(1)
,满足算法步骤(1)的(a),所以当前边界
B
是外边界,NBD=2,
。
(2)上一个边界
B’
是
frame(孔边界)
,从table1可知当前边界B的父边界为
B’
(frame)。
(3.1)以
为中心,
为起始点,按顺时针查找到第一个非0像素点
。
(3.2)
,
(3.3)以
为中心,按逆时针方向,
的下一个点(0,2)为起始点查找
的4邻域第一个非0像素点为(2,2),则
。
(3.4)
不是(3.3)中
已经检查过的0像素点,并且
,则
。
(3.5)
,
,转到(3.3)
下面就是算法的循环步骤,判断方式与上述差不多,在此本人不再多加赘述。
OpenCV中的findContours()
void cv::findContours(InputArray image,
OutputArrayOfArrays contours,
OutputArray hierarchy,
int mode,
int method,
Point offset = Point()
) 函数的hierarchy用来保存上述算法中得到的边界的拓扑序列,如FiG3的右边结构。contours则是提取到的轮廓,mode可以用来指定只提取外轮廓或提取全部轮廓,method指定轮廓近似方式(用哪些方向的线条近似)。