“而不是一时的热血!”
前言
沿用上一章的gazebo中的机器人,为机器人使用深度摄像头插件。大概流程和move.xacro步骤一致,略。既可以查看彩色图像,深度图像还有点云信息.
- 延用工作空间test2_ws;
- 功能包demo4_urdf_gazebo存放代码;
- laser的xacro代码放在demo4_urdf_gazebo/urdf/xacro/gazebo/kinect.xacro;
- 最后综合launch文件demo4_urdf_gazebo/launch/all.launch.
先写kinect.xacro文件,然后在综合xacro文件中加入kinect文件即可。
注意:这里偷懒将之前激光雷达的支架作为深度相机的载体,因此实际上的kinect在这里具体化为support
kincet.xacro文件详解
- 摄像头插件节点的命名空间
<sensor type="depth" name="camera">
- 对应base中的support
<gazebo reference="name of kinect link ">
...
<frameName>name of kinect link</frameName>
效果展示
gazebo中没有太大变化,主要是rviz中。
rviz
1. 彩色图像
配置一下:加入camera,然后选中订阅话题(左侧image_topic)/camera/rgb/image_raw,可以驱动小车,可以看到彩色图像随之变动。

2. 深度图像
配置一下:加入camera,然后选中订阅话题(左侧image_topic)/camera/depth/image_raw,可以驱动小车,可以看到彩色图像随之变动。

3. 点云pointcloud2
配置一下:加入PointCloud2,然后选中订阅话题(左侧image_topic)/camera/depth/points,可以驱动小车,可以看到d点云图像随之变动。
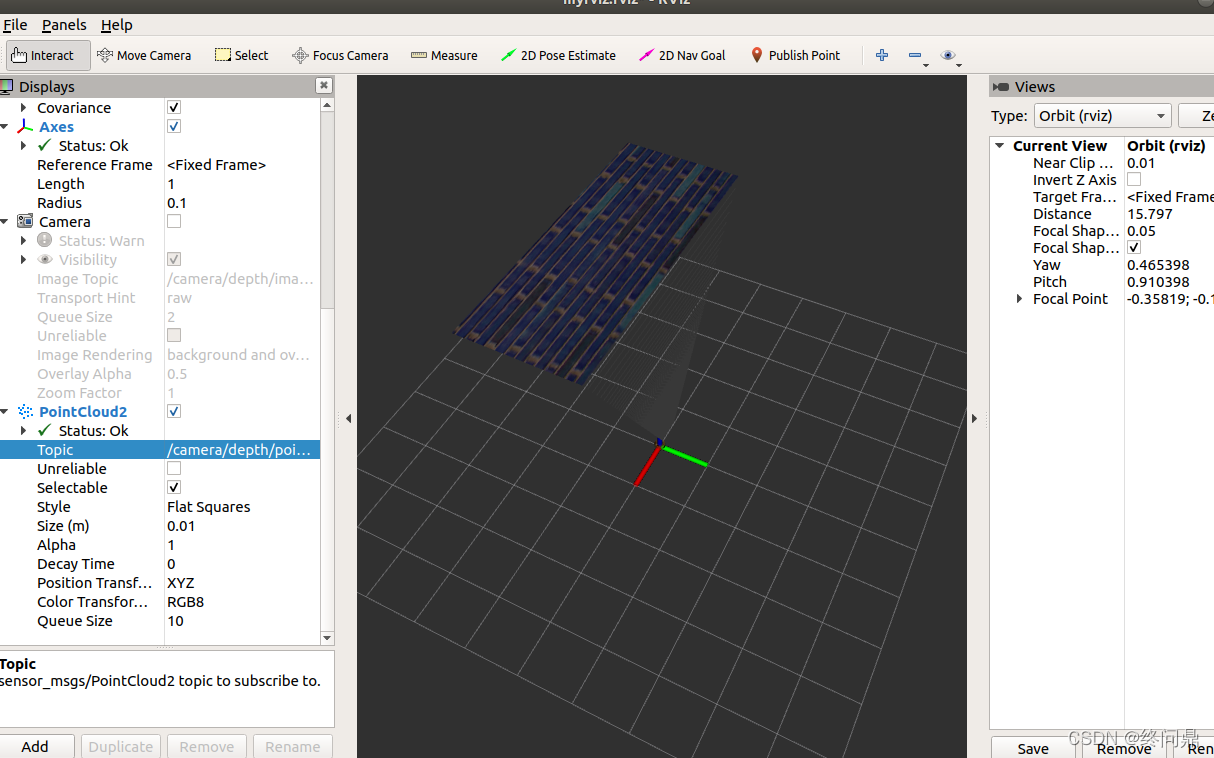
此时会发现图像不在正前方,原因是kinect和点云没有共用坐标系,解决办法:
1.在插件kinect.xacro中为kinect设置坐标系,修改配置文件的标签内容:
<frameName>support_depth</frameName>
2.发布新设置的坐标系到kinect连杆的坐标变换关系,在启动rviz的launch中,添加:
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
再次打开即可,效果如下

方向正确,OK了.
kinnect.xacro源码
<robot name="my_sensors" xmlns:xacro="http://wiki.ros.org/xacro">
<!-- <gazebo reference="name of kinect link "> -->
<gazebo reference="support">
<sensor type="depth" name="camera">
<always_on>true</always_on>
<update_rate>20.0</update_rate>
<camera>
<horizontal_fov>${60.0*PI/180.0}</horizontal_fov>
<image>
<format>R8G8B8</format>
<width>640</width>
<height>480</height>
</image>
<clip>
<near>0.05</near>
<far>8.0</far>
</clip>
</camera>
<plugin name="kinect_camera_controller" filename="libgazebo_ros_openni_kinect.so">
<cameraName>camera</cameraName>
<alwaysOn>true</alwaysOn>
<updateRate>10</updateRate>
<imageTopicName>rgb/image_raw</imageTopicName>
<depthImageTopicName>depth/image_raw</depthImageTopicName>
<pointCloudTopicName>depth/points</pointCloudTopicName>
<cameraInfoTopicName>rgb/camera_info</cameraInfoTopicName>
<depthImageCameraInfoTopicName>depth/camera_info</depthImageCameraInfoTopicName>
<frameName>support_depth</frameName>
<baseline>0.1</baseline>
<distortion_k1>0.0</distortion_k1>
<distortion_k2>0.0</distortion_k2>
<distortion_k3>0.0</distortion_k3>
<distortion_t1>0.0</distortion_t1>
<distortion_t2>0.0</distortion_t2>
<pointCloudCutoff>0.4</pointCloudCutoff>
</plugin>
</sensor>
</gazebo>
</robot>
rviz.rviz源码
<launch>
<!-- 矫正点云坐标系 -->
<node pkg="tf2_ros" type="static_transform_publisher" name="static_transform_publisher" args="0 0 0 -1.57 0 -1.57 /support /support_depth" />
<!-- 启动 rviz -->
<node pkg="rviz" type="rviz" name="rviz" args="-d $(find demo4_urdf_gazebo)/config/myrviz.rviz" />
<!-- 关节以及机器人状态发布节点 -->
<node name="joint_state_publisher" pkg="joint_state_publisher" type="joint_state_publisher" />
<node name="robot_state_publisher" pkg="robot_state_publisher" type="robot_state_publisher" />
</launch>
版权声明:本文为Eric_Sober原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。