上一个博文说了一种手眼标定系统的特殊情况,就是相机随着机械手一起移动的情况。虽然前面简单介绍了一种办法,就是内次拍照时让相机回到之前标定的位置,但是这样处理机器人的工作效率就会大大降低,产生很多重复动作,所以这篇博文就来讲一种更简单的标定方案。
下面是halcon官方给的手眼标定系统的案例代码。
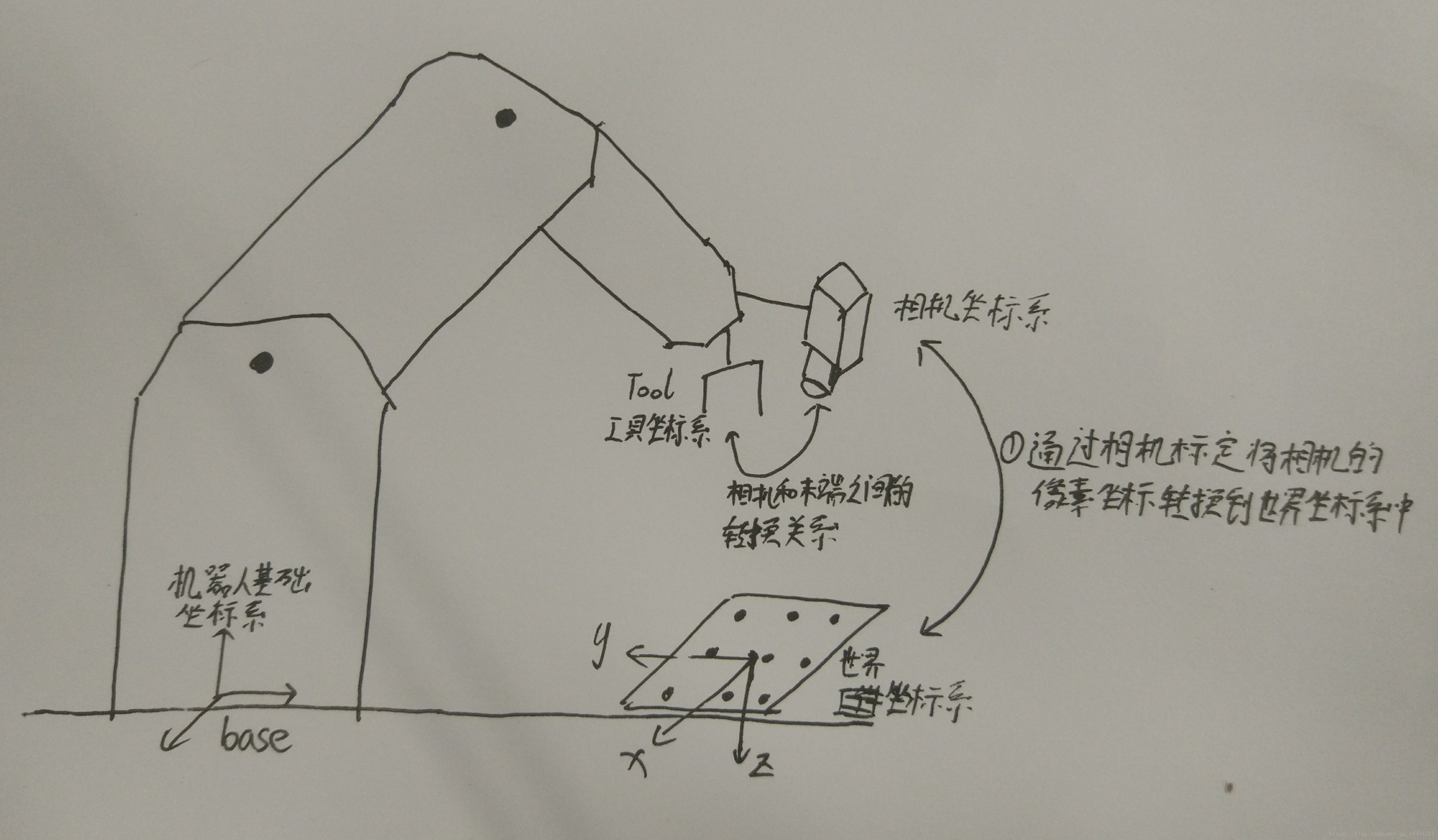
这个例子主要应用于相机固定在机械手末端的手眼系统中,而且标定板相对于机器人也是静止的。
在这种情况下,手眼校准的目标是确定两个未知姿势:
校准对象(CalObjInBasePose)的坐标系中机器人基座的姿态。
相机在工具中心点坐标系中的姿态。
理论上,作为输入,该方法在摄像机坐标系中至少需要3个校准对象的姿势。但是我们在实际工程应用中需要至少10个姿态。
校准对象的姿态是从连接到机器人的摄像头记录的校准对象的图像中获得的。为了获得更好的结果,将摄像机相对于校准对象放置以使对象在图像中倾斜是至关重要的。
在手眼校准之后,提取计算出的变换并用于计算摄像机坐标系中校准对象的姿态。
dev_update_off ()
* Directories with calibration images and data files
ImageNameStart := '3d_machine_vision/handeye/movingcam_calib3cm_'
DataNameStart := 'handeye/mo
版权声明:本文为qq_16481211原创文章,遵循 CC 4.0 BY-SA 版权协议,转载请附上原文出处链接和本声明。